«Козлиную» робоногу научили бегать и прыгать в любом направлении
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2016-08-19 01:05
Саймон Калуш (Simon Kalouche) из Университета Карнеги — Меллона разработал роботизированную ногу GOAT, которая может в любом направлении идти, бежать и прыгать с последующим мягким приземлением. Кратко о разработке рассказывает IEEE Spectrum.
Ходьба сама по себе является достаточно сложной задачей для шагающих роботов. Даже современные роботы, участвовавшие в соревнованиях DARPA Robotics Challenge в 2015 году, демонстрировали проблемы с сохранением равновесия. Как правило, для безопасной ходьбы роботы вынуждены аккуратно и точно ставить ноги, четко фиксируя их на поверхности, что крайне сложно при передвижении по неровной поверхности и смене направления движения.
Шагающих роботов, способных к динамичным движениям, крайне мало. В качестве удачных примеров можно привести прыгающего на бегу через препятствия робота-гепарда из MIT или японского шагающего робота, которого показали весной 2016 года на конференции в Токио разработчики из Alphabet.
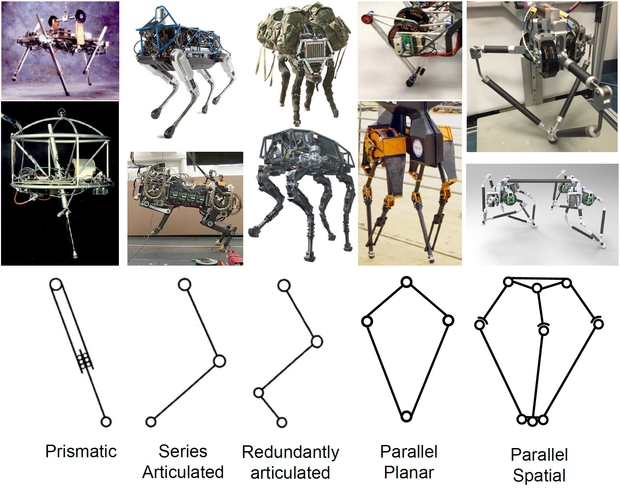
Саймон Калуш решил вместо оптимизации алгоритмов для передвижения на ногах классической компоновки использовать пространственно-параллельную схему размещения актуаторов в ноге — таким образом, GOAT может передвигаться в любом направлении. Такая робонога может как аккуратно переступать, так и бегать, и даже прыгать за счет пружинящей конструкции даже по сложной поверхности.
Для демонстрации возможностей пространственно-параллельной схемы размещения актуаторов разработчик построил работающий прототип одной ноги на электромоторах с планетарной передачей — по словам Саймона Калуша, пневматика и гидравлика требуют слишком громоздких систем. В проведенных экспериментах на стенде нога показала высоту прыжка в 82 сантиметра — это более чем в два раза превышает собственную высоту конструкции.
Различные схемы реализации ног в робототехнике.
Simon Kalouche / Carnegie Mellon University
В дальнейшем автор планирует продолжить разработку GOAT, провести полевые испытания прототипа и приступить к реализации полноценного робота на ногах с пространственно-параллельной схемой. По мнению Саймона Калуша, робоноги такой конструкции подойдут в тех случаях, когда не помогут традиционные колесные или шагающие роботы. Робот с ногами GOAT может взбираться по крутым склонам, перепрыгивать высокие препятствия и ямы, менять направление движения в замкнутом пространстве, где невозможен разворот, а также двигаться по сложной поверхности — например, по руинам. Робот с такими возможностями может пригодиться как военным, так, например, и спасателям.

Рендер возможной схемы робота на ногах GOAT.
Simon Kalouche / Carnegie Mellon University
Телеграм: t.me/ainewsline
Источник: cont.ws