Робот-водолаз исследовал затонувший корабль 17 века
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2016-04-29 15:57
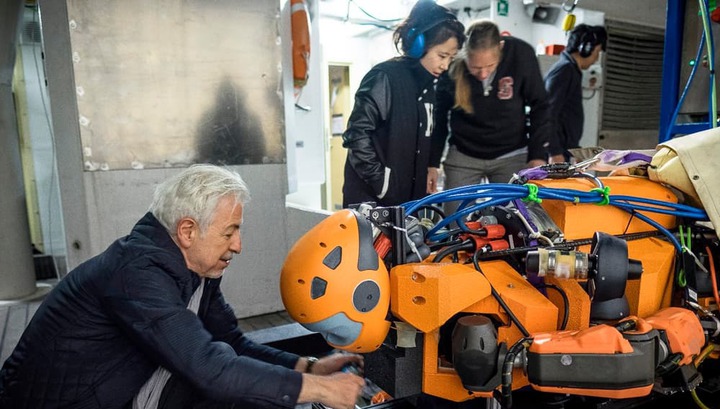
Стэнфордский университет (Stanford University) представил общественности нового робота-водолаза с искусственным интеллектом. Разработка, получившая название OceanOne, уже совершила "рабочее" погружение и смогла отыскать своё первое сокровище.
OceanOne действительно выглядит как водолаз: "рост" робота составляет полтора метра, а его голова оснащена стереоскопической камерой, которая позволяет исследователям управлять роботом и видеть всё, что видит он. Шарнирные руки оснащены датчиками силы, которые обладают тактильной обратной связью - оператор управляет ими с помощью джойстика и сразу может определить, держит ли робот в руках что-то твёрдое и тяжёлое, или же более лёгкое хрупкое.
Вместо "ног" в нижней части роботизированного водолаза находятся восемь разнонаправленных двигателей малой тяги, а также батареи для питания устройства и компьютеры. С их помощью искусственный интеллект выбирает нужный уровень давления для удержания предметов, чтобы не повредить их, сообщается в пресс-релизе Стенфордского университета.
"OceanOne представляет собой управляемый вами аватар. Цель - виртуальный дайвинг, устраняющий опасность для человека, - рассказывает профессор информатики Стэнфордского университета Уссама Хатиб (Oussama Khatib). - Удивительно было получить машину с человеческими характеристиками, работающую на глубине как человек-водолаз".
Чтобы продемонстрировать прототип человекоподобного робота в действии, команда студентов и аспирантов Хатиба, а также профессор машиностроения Марк Куткоски (Mark Cutkosky) вылетели во Францию и работали совместно с директором подводных археологических исследований Министерства культуры Франции Мишель Л-Аур (Michel L-Hour).
Ранее команда глубоководных археологов провела дистанционные исследования в 20 милях у южного побережья Франции, где в 1664 году затонул флагманский корабль короля Людовика XIV под названием La Lune. Это кораблекрушение могло хранить нетронутыми многочисленные сокровища и артефакты.
Исследователи ждали в лодке на поверхности океана, пока подводным аппаратом управлял Винсент Крез (Vincent Creuze), исследователь из университета Монпелье (Universite de Montpellier), удерживающий его на расстоянии и обеспечивающий изображение.
Данные о кораблекрушении были загружены в OceanOne. Опустившись в воду, он автономно поплыл к кораблю. Хатиб на всякий случай находился у джойстика управления, но в основном робот справлялся самостоятельно и избегал столкновений с препятствиями, так как его бортовые датчики измеряют скорость и направление течения и турбулентность.
Когда Хатиб заметил на видео вазу размером с грейпфрут, он взял управление роботом на себя: отдал команду зависнуть над вазой, прикоснуться к ней конечностями, проанализировать контуры и вес, а затем поместить один палец внутрь для лучшего захвата. Когда робот надёжно обхватил вазу, Хатиб отдал ему команду плыть к корзине, аккуратно поместить вазу внутрь и плотно закрыть крышку, после чего корзина была передана водолазу для подъёма на поверхность.
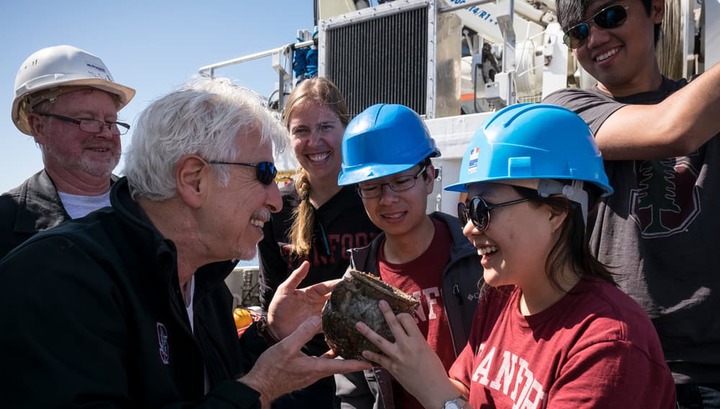
"Вы можете точно почувствовать, что делает робот, словно сами присутствуете рядом. Ощущение прикосновения создаёт новый уровень восприятия, прокомментировал Хатиб. - Мы объединяем человека и робота интуитивно и осмысленно. Человек может дать роботу интуицию, опыт и когнитивные способности. Вместе они образуют удивительное сочетание. Человек и робот способны работать в опасных для человека условиях без риска для жизни и здоровья".
OceanOne возвратится в Стэнфорд в следующем месяце, и команда Хатиба продолжит работу над проектом. Сейчас главная цель - создать робота-водолаза, который заменит людей в опасных и сложных исследованиях: подобные устройства уже в скором времени могут быть задействованы для исследования японского берега в районе Фукусимы, а также при изучении коралловых рифов на больших глубинах, в археологических исследованиях или при мониторинге мест стихийных бедствий и кораблекрушений.
Телеграм: t.me/ainewsline
Источник: www.vesti.ru