Мобильный робототехнический комплекс гранатометного взвода мотострелкового батальона
МЕНЮ
Искусственный интеллект
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Техническое зрение
Чат-боты
Авторизация
2016-06-22 21:59







Мобильный робототехнический комплекс гранатометного взвода мотострелкового батальона
Предложена концепция создания наземных робототехнических ударных комплексов для гранатометных взводов мотострелковых батальонов (МСБ) отдельных мотострелковых бригад (ОМСБР) Сухопутных войск. Показан возможный вариант создания пусковой установки реактивной системы залпового огня (РСЗО) для мобильного робототехнического комплекса (МРК).
Анализ боевых действий в войнах и вооруженных конфликтах, показывает, что артиллерия должна быть готова выполнить большую часть (до 70 %) объема огневых задач в бою. Для выполнения этого требования необходимо иметь в структуре подразделений мотострелкового батальона такие системы, которые могут обеспечить не только необходимую глубину огневого воздействия по противнику, но и возможность быстрого рассредоточения артиллерии по глубине в боевых порядках своих войск и необходимое массирование огня как по фронту, так и в глубине боевых порядков.
Исследования ученых Пензенского артиллерийского инженерного института показали, что повышение возможностей по дальнему огневому поражению в 2,1 раза за счет технического перевооружения на новые системы артиллерии позволяет повысить боевые возможности по нанесению ущерба противоборствующей стороне в бою на 40-45 %.
В статье рассматриваются архитектура наземного робототехнического ударного комплекса РСЗО гранатометного взвода мотострелкового батальона ОМСБР [2] . Известно, что гранатометный взвод предназначен для поражения живой силы и огневых средств противника, расположенных вне укрытий, в открытых окопах (траншеях) и за складками местности. Он используется, как правило, в полном составе для поддержки мотострелковых рот первого эшелона, но может придаваться в полном составе роте, действующей на направлении сосредоточения основных усилий батальона, или отделениям рот первого эшелона.
Включение в организационно-штатную структуру (ОШС) гранатометного взвода МСБ батареи мобильных робототехнических комплексов реактивной системой залпового огня (МРК-РСЗО-2) на базе пусковых установок Б8М-1 с 80-мм неуправляемыми авиационными ракетами С-8КОМ позволит наносить поражение противнику на дальностях до 4000 м от линии соприкосновения.
В настоящее время в ОШС гранатометного взвода МСБ ОМСБР (штат № 5/060) на вооружении стоят 30-мм автоматический гранатомет АГС-17 «Пламя», который имеет дальность стрельбы 1700 метров. Таким образом, оснащение гранатометного взвода мотострелкового батальона указанными образцами мобильных робототехнических комплексов РСЗО позволит увеличить огневые возможности по дальности в 2 раза, по количеству боекомплекта боеприпасов до 2 раз, при этом, гранатометный взвод становится подразделением, способным самостоятельно решать основные огневые задачи.
На рисунке 1 показан вариант мобильного робототехнического комплекса реактивной системы залпового огня на базе четырех пусковых установок Б8М-1. На рисунке 1 приняты следующие обозначения:
мобильный пункт управления на базе БТР
МРК-РСЗО-2
беспилотный авиационный комплекс артиллерийской разведки
Следует заметить, что для МРК-РЗСО-2 предстоит разработать пусковую установку (ПУ) на базе четырех пусковых установок Б8М-1 с 80-мм неуправляемыми авиационными ракетами С-8КОМ (Рис.2). Разработка ПУ (индекс Б8М4-М) позволит МРК-РСЗО-2 иметь 80 НАР на одном МРК. Состав, внешний вид и принцип компоновки ПУ Б8М4-М показан на рисунке 2 [2].
Известно [4], что при пусках ракет пакет направляющих (ПН) РСЗО совершает колебания как по высоте, так и по направлению. Так как амплитудный и частотный процесс колебаний пакета направляющих существенно меняется в процессе залпа РСЗО, то ухудшается и кучность стрельбы. В настоящее время, в пусковых установках РСЗО боевых машин (БМ), принятых на вооружение Сухопутных войск, используются штатные пластинчатые (пружинные) рессоры для гашения колебаний пакета направляющих при стрельбе РСЗО.
Процесс гашения колебаний пакета направляющих РСЗО является неуправляемым, что вызывает неуправляемые (случайные) колебания пакета направляющих РСЗО в процессе стрельбы. Это во многом, наряду с другими факторами, определяет случайный характер величины эллипса рассеивания РСЗО и снижает эффективность применения РСЗО. Для гашения колебаний пакета направляющих (рис.2) при стрельбе НАР, предлагается использовать в ПУ МРК-РСЗО-2 для Б8М4-М новый тип амортизаторов: тросовые амортизаторы-виброизоляторы [4].
Использование тросовых (пружинно-торсионных) виброизоляторов позволит реализовать способ управления колебаниями ПУ МРК-РСЗО-2 путем автоматического (с помощью двигателя) натяжения тросовых (пружинно-торсионных) виброизоляторов, что приведет к изменению их коэффициента жесткости в соответствии с требуемыми амплитудой и частотой колебаний пакета направляющих [4].
Тросовые (пружинно-торсионные) виброизоляторы могут регулироваться в ходе стрельбы с помощью исполнительного двигателя коррекции натяжения виброизоляторов и динамометрических датчиков для измерения величины натяжения виброизолятора и инерциально-измерительного блока для контроля амплитуды и частоты колебаний пакета направляющих при стрельбе.
В ПУ Б8М4-М, данные от инерциально - измерительного блока (ИИБ) размещенного непосредственно на пакете направляющих, поступают в центральный блок управления и навигации, который работает в реальном масштабе времени обрабатывает результаты измерений отклонений пакета направляющих.
ЦБУН управляет процессом натяжения тросовых (пружинно-торсионных) виброизоляторов, в соответствии с заданным «портретом» характеристик пакета направляющих МРК-РСЗО-2 по амплитуде и частоте колебаний пакета направляющих ПУ Б8М4-М.
Таким образом, при использовании ИИБ и тросовых (пружинно-торсионных) виброизоляторов позволит получить требуемый эллипс рассеивания НАР при залпе ПУ Б8М4-М, который необходим для получения требуемой кучности стрельбы, что в принципе нельзя получить при примитивном расположении Б8М-1 на транспортных средствах, которые были использованы при локальных вооруженных конфликтах (рисунок 3).
Существующие неавтоматизированные средства наведения и подготовки огня, например в боевой машине (БМ) 9A52-2 РСЗО «Смерч», содержат оптическое прицельное приспособление, приводы наведения, блок приема-передачи данных. Для подготовки залпа выбирается стартовая позиция, с помощью машины-топопривязчика осуществляется ее топогеодезическая подготовка, в том числе определение координат и закрепление на местности ориентирного направления с известным дирекционным углом.
Для разрабатываемого МРК-РСЗО-2 предстоит разработать автоматизированную систему управления наведением и огнем (АСУНО). Вариант блок-схемы АСУНО для МРК-РСЗО показан на рисунке 4, которая позволяет рассредоточить МРК на местности и значительно повысить живучесть в условиях целенаправленного противодействия со стороны противника.
Внедрение МРК-РСЗО-2 в гранатометный взвод не нарушает систему боевого управления мотострелкового батальона. Боевое управление МРК-РСЗО-2 осуществляется с автоматизированных рабочих мест (АРМ) операторов мобильного пункта управления (МПУ). Каждый оператор с АРМ мобильного пункта управления управляет от 2 до 10 единиц МРК-РСЗО-2.
Архитектура МРК-РСЗО-2
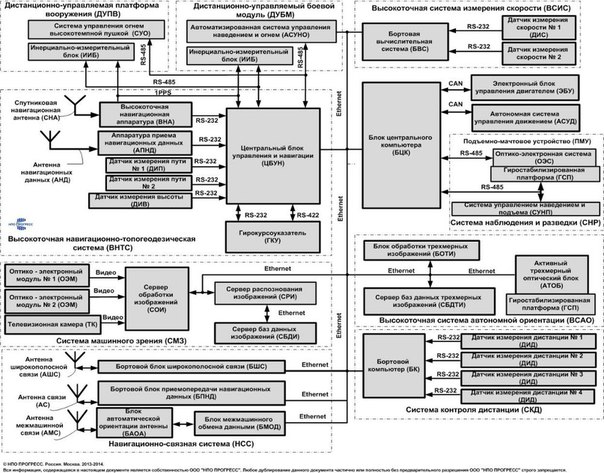
Состав и схема информационного взаимодействия МРК-РСЗО-2 показаны на рисунке 5 [2]. В состав МРК-РСЗО-2 входят:
Высокоточная навигационно-топогеодезическая система
Система машинного зрения
Высокоточная система автономной ориентации
Высокоточная система измерения скорости
Система контроля дистанции
Навигационно-связная система
Система блока центрального компьютера
Система наблюдения и разведки
Дистанционно-управляемый боевой модуль
Система дистанционно-управляемой платформы вооружения - по согласованию с заказчиком
Высокоточная навигационно-топогеодезическая система предназначена для обеспечения топографической привязки, вычисления текущих координат и пройденного пути изделия МРК-РСЗО-2, формирования секундной метки времени (синхронизации), определения курса (азимута) относительно истинного (географического) меридиана, определения и выдачи параметров навигации и ориентации в аппаратуру и системы комплекса: углов ориентации в трехмерном пространстве, скорости поворота относительно трех осей, скорости и ускорения перемещения по трем направлениям; приема высокоточных корректирующих навигационных данных от МПУ.
Система машинного зрения предназначена для автоматического обнаружения и классификации целей (танков, транспортных средств и др.) и ситуаций (взрывов, возгорании и т.д.), передачи в реальном времени видеоинформации серверу баз данных МРК и оператору мобильного пункта управления. Высокоточная система автономной ориентации предназначена для трехмерного сканирования окружающей местности и измерения дальности до препятствий с последующей обработкой полученных данных на основе бортовой базы данных трехмерных образов с расчетом дальностей, приём и передачу информации в блок центрального компьютера для выработки команд на планирование маршрута и движения.
Гирокурсоуказатель (индекс «ГКУ-500») представляет собой высокоточную бесплатформенную инерциально-навигационную систему, состоящую из трех волоконно-оптических гироскопов и трех акселерометров, которые составляют блок чувствительных элементов. Навигационно-связная система обеспечивает организацию радиоканалов в информационно-управляющей сети:
широкополосной сети передачи данных для организации TCP/IP связи между изделиями МРК-РСЗО-2 и МПУ для приема и передачи командной, телеметрической и мультимедийной информации
сети межмашинного обмена данным, сети высокоточных навигационных данных приема навигационных дифференциальных поправок от МПУ и сети навигационных данных для приема данных о местоположении МРК
Более подробное описание всех систем приведено в [1-2].
Программное обеспечение.
Архитектура программного обеспечения МРК показана в [1-3].
Шасси.
Для всех мобильных робототехнических комплексов огневых тактических подразделений Сухопутных войск предлагается использовать вариант двухосного колесного шасси. Требования к шасси робототехнического комплекса имеют ряд принципиальных особенностей. Помимо общих требований по проходимости, грузоподъемности, энерговооруженности и т.п. имеются также такие, которые и определяют то, что это робот: возможность полной автоматизации всех процессов на основе компьютерного управления, включая управление энергоустановкой, трансмиссией, рулевым и др. системами и узлами.
Не будем забывать, что речь идет о беспилотном варианте транспортного средства и привычные средства управления (руль, рычаги, педали, кнопки и т.п.) тут в принципе неуместны. В связи с этим, автор предлагает рассмотреть вариант изготовления мобильных робототехнических комплексов на основе колесного шасси HL-740-9S (HYUNDAI) - путем его модификации. Разумеется, что отечественная промышленность отчасти производит и в состоянии сделать полный российский вариант такого шасси.
Колесная схема на полноприводном (на каждое колесо) шасси позволяет обеспечить высокую проходимость, достаточно большую скорость передвижения по дорогам и пересеченной местности, большую маневренность, большой запас хода и моторесурса при высокой грузоподъемности (более 5 тонн). Кроме того, предлагаемое решение обеспечивает большую степень автоматизации управления двигателем и движением МРК-РСЗО-2.
Выбор колесного шасси на базе HL-740-9S при соотношении «цена-качество» является, на взгляд автора, оптимальным вариантом для систем вооружения РСЗО, в том числе по показателям «живучесть-эффективность». Такое шасси, в отличие от гусеничного MV-10, легко обеспечивает различные виды поворотов и разворотов при средствах управления МПУ.
Компоновка шасси HL-740-9S состоит из ведущей и ведомой тележек. Ведущая тележка оснащена дизельным двигателем, обеспечивает необходимую энерговооруженность, маневрирование и управление. Ведомая тележка обеспечивает грузоподъемность и достаточную полезную площадь для размещения бортовых систем управления и вооружения. Ведомая тележка шасси имеет возможность поворота на 40 градусов от цента массы HL-740-9S, максимальная скорость движения - 40 км/ч., дорожный просвет - 417 мм., запас хода 350 км, грузоподъемность более 5 тонн.
Таким образом, предлагается универсальное шасси для создания мобильных робототехнических комплексов в интересах огневых тактических подразделений артиллерии мотострелковых батальонов Сухопутных войск. Универсальность использования шасси HL-740-9S заключается в том, что ведущая тележка – это тягач, а ведомая – сменяемый прицеп на котором размещаются системы управления и вооружения (РСЗО, ПТРК и др. вооружение), размеры и форма которого могут быть различными в зависимости от решаемой задачи.
Мобильный пункт управления.
Организационно-техническую основу управления наземным робототехническим ударным комплексом составляет система управления, представляющая собой совокупность функционально связанных между собой органов управления, мобильный пункт управления и средств управления. Мобильный пункт управления (МПУ) предназначен для получения данных (координат целей) от радиолокационной и оптико-электронной разведки МРК, приема высокоточных навигационных данных от спутниковой навигационной системы ГЛОНАСС, передачи высокоточных навигационных данных в МРК, автоматизированного ввода данных (метеорологических, маршрутов и координат целей) в центральный блок управления и навигации МРК, хранении идентификационных данных и электронных навигационных карт, организации связи и управления огнем МРК при подготовке и в ходе ведения боевых действий с автоматизированных рабочих мест операторов.
В [1-2] показан вариант состава мобильного пункта управления. К сожалению, в объемах одной статьи не представляется возможным рассмотреть все аспекты построения архитектуры и программного обеспечения автономного наземного робототехнического ударного комплекса РСЗО.
Таким образом, предлагаемый вариант реализации МРК-РСЗО2 будет иметь хорошие показатели:
высокую автономность
уникальную мобильность
высокую точность топогеодезической привязки
высокую точность наведения пакета направляющих РСЗО
многофункциональность
высокую живучесть
МОСКВА, Сергей Мосиенко
http://www.arms-expo.ru/analytics/perspektivnye-razrabotki/mobilnyy-robototekhnicheskiy-kompleks-granatometnogo-vzvoda-motostrelkovogo-batalona/
Источник: www.arms-expo.ru