Эволюция систем управления ранних советских космических аппаратов
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2023-05-23 14:23

Трудно представить современный космический корабль, одноразовый или многоразовый, отечественный или иностранный, без сложной системы управления, построенной на основе производительных компьютеров. Однако так было далеко не всегда. Ранние космические аппараты советской разработки вообще не имели никаких систем управления. Затем на аппаратах появились первые простые приборы, и их дальнейшая эволюция привела к появлению полноценных многофункциональных ЭВМ.
По заданной траектории
Отечественные и зарубежные зонды и аппараты, использовавшиеся в ранних экспериментах и исследованиях в области ракетно-космической техники, не имели полноценных систем управления. На борту присутствовали приборы автоматизации отдельных агрегатов и систем, но возможность полноценного управления полетом не предусматривалась. Более того, на тот момент необходимость в них отсутствовала.К примеру, первый искусственный спутник Земли СП-1 («Спутник-1»), запущенный в октябре 1957 г., имел на борту блок аккумуляторов, радиопередающее устройство, набор датчиков и средства охлаждения. Какие-либо устройства для определения координат и положения в пространстве, а также управления полетом отсутствовали. Спутник должен был двигаться по траектории, определенной при его запуске.

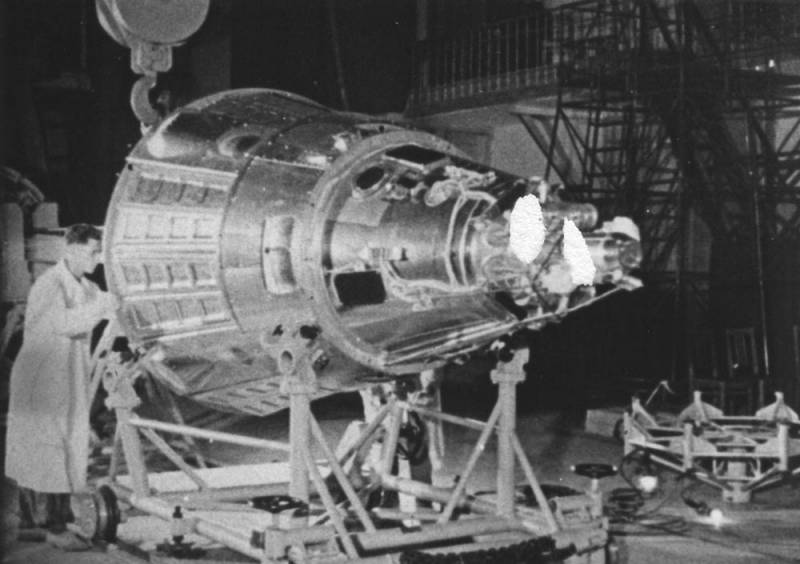
По схожему принципу построили и следующий «Спутник-2», полезной нагрузкой которого стал контейнер с собакой Лайкой. На борту имелись приборы только для сбора и передачи данных о состоянии животного. Впрочем, предусматривалась и автоматизация некоторых процессов, таких как охлаждение обитаемого контейнера.Еще на стадии предварительной проработки стало ясно, что перспективная космическая техника должна иметь те или иные средства управления. Самостоятельно или по командам с Земли спутники должны включать приборы, проводить исследования и т.д. Такие конструкторские задачи удалось решить уже к началу 1958 г. при создании следующего космического аппарата.В мае 1958 г. на орбиту отправился «Спутник-3» или объект «Д». Впервые в отечественной практике этот аппарат получил средства автоматического и дистанционного управления. Бортовой комплекс приборов мог принимать и выполнять команды с наземного пункта управления. На борту имелось 12 научных приборов разного назначения, которые включались и отключались по команде или бортовым программно-временным устройством. Кроме того, на определенных участках орбиты, где отсутствовала связь с Землей, автоматически включалась запись телеметрии на магнитную ленту. После восстановления связи осуществлялась передача записанной информации.
Дистанционное управление
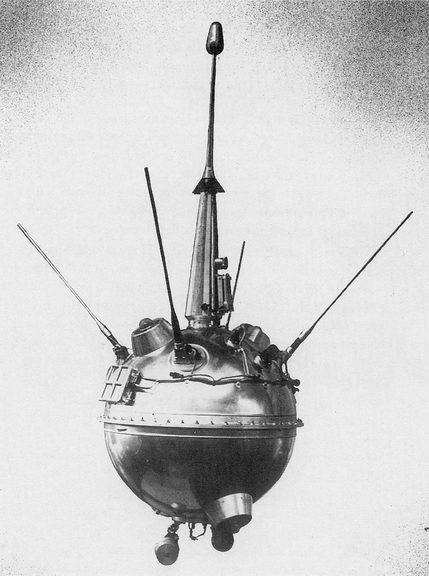
Вскоре радиокомандное дистанционное управление было использовано в сфере межпланетных исследований. Начиная с осени 1958 г., СССР предпринял несколько попыток отправки автоматических межпланетных станций к Луне. Первые пуски завершились авариями, и только в январе 1959-го АМС «Луна-1» смогла пройти рядом с естественным спутником Земли. В сентябре того же года аппарат «Луна-2» впервые совершил посадку на Луну – жесткую, с разрушением конструкции.На борту ранних изделий «Луна» имелся набор измерительных приборов разного назначения, устройства для контроля за их работой, а также радиостанция для приема команд и передачи телеметрии. Для полета к Луне станции устанавливались на т.н. блоке «Е» – третьей ступени ракеты-носителя «Восток-Л» с возможностью дистанционного управления. Блок отвечал за вывод АМС на расчетную траекторию.После старта полет ракеты «Восток-Л» с «Луной» отслеживался с земли радиолокационными средствами, изначально созданными для испытаний баллистических ракет. Данные о траектории поступали и обрабатывались специальным вычислительным комплексом на основе машины БЭСМ-2. При отклонении изделия «Е» с «Луной» от оптимальной траектории, комплекс формировал и передавал ему команды для коррекции траектории. В целом такая система хорошо показала себя, хотя и имели место ошибки.
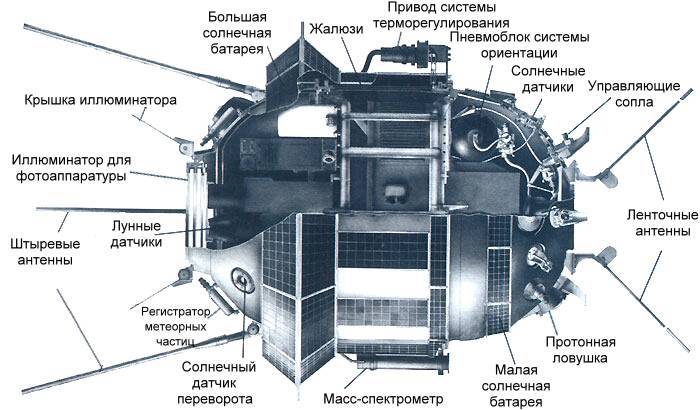
Ранние космические аппараты могли летать только по заранее рассчитанной траектории, на которую выводились ракетой-носителем или разгонным блоком. Для дальнейшего развития космических программ следовало разработать некие средства управления, позволяющие ориентировать аппарат в пространстве и совершать маневры.Первые успехи в этом направлении были получены при разработке АМС «Луна-3», успешно запущенной в октябре 1959 г. Для этой станции была создана оригинальная система фототелеметрической ориентации «Чайка». В ее состав входили оптические элементы, определявшие положение Солнца и Луны относительно АМС, вычислительное устройство и маневровые двигатели. Научное оснащение станции, как и ранее, работало по установленной программе или по командам от центра управления.Именно наличие системы «Чайка» позволило «Луне-3» выполнить фотосъемку естественного спутника Земли, в т.ч. его обратной стороны. В дальнейшем наработки по этой системе и ее основные идеи активно использовались в других проектах космической техники.
Новые возможности
С 1957 г. велась разработка перспективного пилотируемого космического корабля, впоследствии названного «Востоком». Он получил автоматическую и ручную системы управления, дублировавшие друг друга. Все средства отличались определенной простотой и соответствовали поставленным задачам. Так, аппаратура позволяла выполнять ориентацию на орбите и осуществлять спуск. Иные функции фактически отсутствовали. Для ориентации в пространстве корабль имел набор маломощных двигателей, управляемых автоматикой или космонавтом.Выравнивание по горизонту осуществлялось при помощи инфракрасных датчиков. По оси орбиты корабль ориентировался по Солнцу (автоматически) или по Земле, при помощи прибора «Взор» (вручную). Самостоятельно или по команде автоматика могла выполнить спуск с орбиты, используя тормозную двигательную установку. Космонавту предлагалось выполнять эти задачи при помощи навигационного прибора «Глобус», который рассчитывал примерный район приземления.В мае 1960 г. состоялся первый запуск опытного «Востока» в беспилотной конфигурации. Аппарат под обозначением «Спутник-4» не смог вернуться на Землю из-за сбоя системы ориентации. Затем состоялось еще несколько стартов, в т.ч. с полезной нагрузкой в виде научной аппаратуры, животных и манекенов. К примеру, 19 августа 1960-го в космосе побывали знаменитые Белка и Стрелка. По очевидным причинам, в этих полетах использовалось только автоматическое и дистанционное управление.
Автономный контроль

Наконец, 12 апреля 1961 г. состоялся первый полет «Востока» в пилотируемой конфигурации. Под управлением первого в мире летчика-космонавта Ю.А. Гагарина корабль совершил один виток и успешно вернулся на Землю. В течение следующих двух лет состоялось еще пять запусков кораблей «Восток» с космонавтами и большое количество беспилотных испытаний. Все эти мероприятия подтвердили работоспособность новых систем управления.Уже во время разработки аппаратов «Луна» или «Восток» советские специалисты прорабатывали дальнейшие пути развития систем управления для космических кораблей и АМС. Так, в конце пятидесятых начались исследования по теме отправки космических аппаратов к Марсу. Сначала работы велись в рамках программы «1М».Применение радиокомандного управления в такой программе фактически исключалось. Отдельные автоматизированные средства, как в предыдущих проектах, тоже имели свои недостатки. В связи с этим было решено создавать т.н. счетно-решающий блок на основе бортовой центральной вычислительной машины, к которому подключались бы все прочие системы АМС. Задача по созданию СРБ была успешно решена, причем с внедрением новых решений и современной компонентной базы. По сути, речь шла о едином бортовом компьютере, выполняющем все задачи во время полета.
Бортовой компьютер
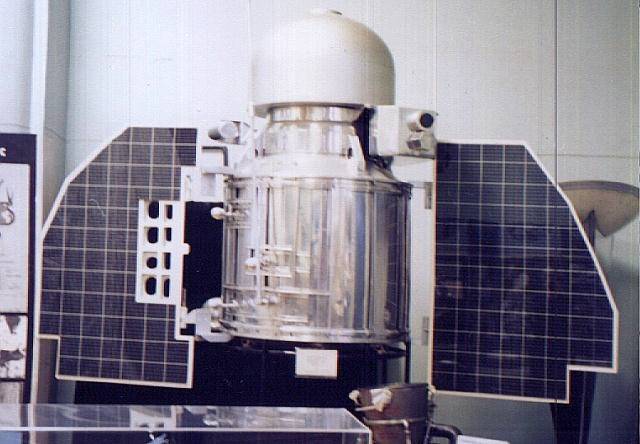
В рамках программы «1М» были построены две станции «Марс-1960». Им предстояло в автоматическом режиме пролететь вблизи Марса, собрать научные данные и передать их на Землю. Запуск обеих АМС состоялся в октябре 1960 г., и оба старта завершились авариями – станции сгорели в атмосфере. Испытать СРБ в полете не удалось.Впрочем, наработки по идее СРБ не пропали. Вскоре стартовала разработка «тяжелого межпланетного корабля» ТМК, который тоже решили оснастить единым вычислительным комплексом. Этот проект не увенчался успехом, но его разработчикам удалось вновь подвинуться в деле создания ЭВМ для космоса.Наконец, в рамках работ по ТМК окончательно сформировали и отработали концепцию единого бортового компьютера, отвечающего за все операции и помогающего экипажу. Вскоре эту концепцию использовали при создании пилотируемого космического корабля «Союз», орбитальных станций «Салют» и ряда других проектов.
В пятидесятых-шестидесятых годах развитие ракетно-космической сферы шло с высокими темпами. Ключевые события, определяющие дальнейшее развитие космонавтики, происходили с завидной регулярностью, и их нередко разделяли считанные месяцы. При этом в отрасли было занято большое количество предприятий и специалистов из разных направлений, что способствовало быстрому решению задач.Эти тенденции хорошо иллюстрирует эволюция систем управления для космических аппаратов и кораблей. Так, в 1957 г. на орбиту отправился «Спутник-1» без каких-либо средств управления, а уже в 1960-м изготовили и запустили АМС с многофункциональным бортовым компьютером. Тогда же были сформированы главные идеи и концепции, до сих пор используемые в космонавтике – но уже на современном техническим уровне.
Эволюционные процессы
Источник: wpristav.su