Выбор антенны на основе глубокого обучения для системы MIMO SDR приемника
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2023-04-22 23:53

В этой статье мы предлагаем и внедряем новую систему программно-определяемой радиосвязи (SDR) с поддержкой множественного ввода-вывода (MIMO) на основе глубокого обучения на основе выбора антенны (DLBAS). Система создается в следующие три этапа: (1) сначала создается коммуникационная платформа MIMO SDR, которая способна обеспечивать связь по восходящей линии от пользователей к базовой станции с помощью дуплекса с временным разделением (TDD).; (2) мы используем глубокую нейронную сеть (DNN) из нашей предыдущей работы для создания сервера принятия решений с глубоким обучением, который помогает платформе MIMO SDR принимать интеллектуальные решения по выбору антенны, что преобразует метод принятия решений, основанный на оптимизации, в метод принятия решений, основанный на данных; и (3) мы настройте сервер принятия решений по глубокому обучению в качестве многопоточного сервера, чтобы улучшить коэффициент использования ресурсов. Чтобы оценить производительность системы MIMO SDR с поддержкой DLBAS, для сравнения выбирается схема выбора антенны на основе нормы (NBAS). Результаты показывают, что предлагаемая схема DLBAS работает наравне со схемой NBAS в режиме реального времени и превосходит систему MIMO без AS с улучшением средней пропускной способности канала до 53%.
1. Введение
Технология Massive multiple-input–multiple-output (MIMO), которая является одним из наиболее перспективных методов в 5G, а также в грядущей беспроводной связи 6G [1,2,3], демонстрирует свое превосходство с точки зрения устойчивости к рэлеевским замираниям, высокой пропускной способности канала, значительной спектральной эффективности и т.д. В последний год появляется все больше и больше теоретических исследований массивных систем MIMO (например, [4,5,6]). Однако в обычных системах MIMO установлено несколько радиочастотных цепей (RF), которые связаны с одинаковым количеством антенн, что приводит к высоким затратам на оборудование и энергопотреблению. В частности, в массивных системах MU-MIMO обычно имеются сотни радиочастотных цепей, в то время как количество радиочастотных цепей в практических системах часто ограничено. В качестве решения проблемы методы выбора антенны (AS) способны сохранить преимущества MIMO при одновременном достижении низкой сложности системы и снижении затрат на оборудование. В частности, AS на основе норм (NBA) и AS на основе пропускной способности (CBAS) являются двумя распространенными типами схем AS, и, по сравнению с CBAS, NBA имеет меньшую вычислительную сложность, что делает NBA более подходящими для реализации в системах связи [7]. Более того, дуплекс с временным разделением (TDD) и многие другие технологии могут быть использованы для оптимизации производительности AS [8,9].
В то же время при беспроводной связи 5G произойдет резкий рост объема передаваемых данных. Как наилучшим образом использовать эту информацию для достижения интеллектуальных коммуникаций, станет новой темой исследования. В последние годы все больше внимания уделяется коммуникациям с использованием искусственного интеллекта (AI), которые используют методы машинного обучения (ML) или глубокого обучения (DL) для решения математических задач в системах беспроводной связи [10,11,12,13,14,15,16,17,18,19,20], в связи с тем, что ML способен передавать данные с помощью обычные задачи математической оптимизации преобразуются в задачи, управляемые данными, для достижения более низкой вычислительной сложности в режиме реального времени. Более конкретно, он [10] использовал потенциальные преимущества ML в системе MIMO с поддержкой выбора передающей антенны (TxAS). По сравнению с обычной схемой TAS схема, предложенная в [10], способна достигать почти такого же коэффициента битовой ошибки (BER) при относительно небольших накладных расходах. Джонг [11] был первым, кто применил алгоритмы многоклассовой классификации в системе MIMO с AS, которая интерпретировала AS для MIMO-коммуникаций как обучение многоклассовой классификации. Результаты подтвердили возможную сложность и производительность AS на основе ML, что дало представление об использовании различных алгоритмов ML для AS. Ляо [12] применил DL для достижения обратной связи по информации о состоянии канала (CSI) в массивной системе MIMO, что решило проблему высокой сложности и низкой точности обратной связи. Кроме того, Cai [13] предложил модель LeNet для приема схем AS, которая представляет собой одноклассовую классификационную модель CNN. Предлагаемый метод использует сверточную структуру для извлечения богатых функций из матриц каналов, и результаты численных экспериментов показывают, что AS, основанный на модели LeNet, превзошел самые современные базовые показатели. Тем временем авторы [14,15,16,17,18,19] исследовали проблемы на основе ML, связанные с физическим уровнем MIMO. О'Ши [14] разработал сквозную обучающую коммуникационную систему MIMO, основанную на неконтролируемом глубоком обучении, для построения автоэнкодера для оценки состояния канала и получения матрицы CSI. Ма [15] предложил сквозную глубокую нейронную сеть для имитации контрольных сигналов и оценки канала, которые получаются с помощью управляемого данными глубокого обучения в широкополосных системах Massive MIMO. Этот новый способ использования подхода глубокого обучения для совместной разработки контрольных сигналов и оценки канала демонстрирует превосходную производительность по сравнению с другими подходами к измерению сжатия. Элбир [16] сформулировал выбор антенны и конструкцию гибридного формирователя луча как задачу классификации / прогнозирования для сверточных нейронных сетей, а Хуанг [17] представил гибридную схему предварительного кодирования, основанную на глубоком наклоне. DL также может работать для замены нетривиального алгоритма. Альрабейя [18] предложил новую концепцию отображения каналов в пространстве и частоте и использовал глубокие нейронные сети для эффективного изучения этого алгоритма отображения каналов. Более того, в сценариях связи между транспортным средством и инфраструктурой 5G mmWave MIMO Клаутау [19] представил и использовал основанную на глубоком обучении методологию генерации данных канала, которая сочетает в себе симулятор движения транспортного средства с симулятором трассировки лучей. Наконец, An [20] исследовал основанную на CNN автоматизированную систему massive MIMO, которая использует смоделированные данные CSI для обучения модели CNN для выработки решения AS. Результаты показывают, что AS на базе CNN был способен достичь оптимальной производительности AS при условии, что количество антенн равно 32.
Однако лишь в немногих исследованиях методов AS, основанных на DL, упомянутых выше, измерялась реалистичная производительность связи из-за аппаратных ограничений. В качестве решения проблемы исследования в области связи следующего поколения могут быть ускорены с помощью программно-определяемого радио (SDR), которое позволяет избежать аппаратных ограничений [21,22,23]. Авторы [22,23] использовали платформу SDR для реализации автоматизированной системы связи MIMO. Используя систему NI SDR MIMO-OFDM, состоящую из ПЛИС, Чжан [22] разработал прототип системы MIMO с поддержкой NBAS, основанной на эффективном алгоритме NBAS, который является первой аппаратной системой, обеспечивающей почти реалистичную систему связи MIMO для работы с алгоритмом NBAS. Основанная на эффективном формировании луча с нулевым усилием (ZFBF), ориентированная на пользователя схема smart TxAS была впервые реализована в коммуникационном SDR приемник КВ диапазона компанией Zhong [23], которая могла выполнять AS в соответствии с различными требованиями к качеству обслуживания (QoS) разных пользователей. Эти случаи имеют для нас важное значение при применении DL в SDR для решения проблем в системах связи.
Насколько нам известно, большинство исследований по коммуникациям с искусственным интеллектом остаются только на уровне теоретических исследований, и лишь немногие из теоретических исследований способны обеспечить аппаратную реализацию. В этой статье мы предлагаем и внедряем новую систему связи MIMO SDR с поддержкой выбора антенны на основе DL (DLBAS). Более конкретно, мы отделяем арифметический блок от коммуникационной платформы MIMO SDR и создаем сервер принятия решений AI, который использует модель DNN, предложенную в нашей предыдущей работе [24], объединяющую хорошо обученную модель ML / DL. Сервер принятия решений AI применяет механизм многопоточности, который способен ускорить скорость отклика, и использует протокол TCP для взаимодействия с платформой MIMO SDR, что обеспечивает надежную доставку данных.
Остальная часть этого документа организована следующим образом. В разделе 2 предлагается система связи MIMO SDR с поддержкой DLBAS. В разделе 3 анализируется производительность системы связи MIMO SDR с поддержкой DLBAS. Выводы приведены в разделе 4.
2. Внедрение системы MIMO SDR с поддержкой DLBAS
В этой статье мы предлагаем новую структуру системы MIMO SDR с поддержкой DLBAS, и ее структурная схема изображена на рисунке 1. Базовая станция (BS) и пользовательские части на рисунке 1 используются в базовой структуре автоматизированной системы MIMO из [22,23], которые построены по 8× 2
Автоматизированная система MIMO на базе платформы NI USRP-RIO SDR, включающая восьмиантенную BS и двух одноантенных пользователей. Однако BS на рисунке 1 модифицирована для работы с сервером принятия решений глубокого обучения. По нисходящей ссылке, после оценки канала в BS, информация о состоянии канала (CSI) загружается на сервер принятия решений глубокого обучения, который запущен на ПК для осуществления интеллектуального выбора для AS.
Структура системы MIMO SDR с поддержкой DLBAS показана на рисунке 2. Подсистема управления и привод DLBAS запущены на хосте BS. В частности, подсистема управления, которая состоит из модулей Status Monitor, контроллера настройки параметров DLBAS и Performance Displayer, используется для ввода системных параметров и отображения производительности системы. Более конкретно, контроллер настройки параметров DLBAS сначала получает входные настройки от пользователей, т.е. количество выбранных антенн, адрес интернет-протокола (IP) и порт сервера принятия решений по глубокому обучению, которые будут переданы исполнительному устройству DLBAS. Более того, во время функционирования системы монитор состояния модулей может записывать рабочее состояние каждого модуля системы, например, состояние USRP-RIOS и их антенн, а затем записанная информация будет отображаться на дисплее производительности, что полезно для проверки работоспособности различных модулей системы. работают должным образом. В соответствии с этой информацией исполнительный механизм DLBAS подключается к серверу принятия решений DL в период инициализации системы. Во время функционирования системы состояние канала будет оцениваться в BS с помощью имитационной модели канала [22], и исполнительный механизм DLBAS загружает оцененный CSI на сервер принятия решений DL, который представлен в разделе 2.1, и получает результат интеллектуального решения от сервера принятия решений DL через TCP-соединитель. Обратите внимание, что тип расчетного CSI - float, а преобразователь Float в Int предназначен для преобразования значения float в целое значение по стандарту IEEE 754.
Подсистема управления FPGA запущена на FPGA каждого USRP-RIO. Исполнительный механизм DLBAS передает сигналы включения AS, которые обновляются в соответствии с результатом принятия решения, полученным от сервера принятия решений DL, в подсистему управления FPGA через панель передачи (FP), которая является модулем, используемым для управления переменными FPGA в главном модуле в LabVIEW. Затем каждая подсистема управления FPGA может управлять каналами передачи данных своего USRP-RIO на основе принятых сигналов включения. Способ управления каналом передачи данных заключается в регулировании вывода данных в режиме первого ввода-первого вывода (FIFO). Более конкретно, в каждом USRP-RIO каналы передачи данных выбранных антенн остаются подключенными, в то время как каналы передачи данных невыбранных антенн отключаются. Данные в отключенных антенных каналах передачи данных должны передаваться напрямую, чтобы предотвратить блокировку FIFO.
Алгоритм глубокого обучения используется для построения прогностической модели, функционирующей на сервере принятия решений Deep Learning для принятия интеллектуальных решений. В следующих подразделах описываются детали реализации схемы DLBAS.
2.1. Структура сервера принятия решений с глубоким обучением
Основываясь на структуре упомянутой выше системы MIMO SDR с поддержкой DLBAS, мы разрабатываем сервер принятия решений DL, чтобы помочь платформе SDR принимать интеллектуальные решения, подразумевая, что метод принятия решений, основанный на данных, имеет место в методе принятия решений, основанном на оптимизации. В верхней части рисунка 2 изображена структурная схема сервера принятия решений DL. На рисунке 2 очевидно, что сервер принятия решений DL состоит из трех частей: модуля передачи данных, модуля логики/обработки данных и модуля принятия решений с глубоким обучением. Подробная информация о каждом модуле приведена ниже.
2.1.1. Модуль принятия решений по глубокому обучению
Во время функционирования системы на хосте могло быть получено и сохранено огромное количество данных об исторических сценариях. Для обработки этих данных используется множество оптимальных или почти оптимальных решений по мере того, как вычислительные возможности компьютера становятся все более мощными. Извлекая функцию из данных этих исторических сценариев, модуль принятия решений DL может быть перенаправлен для руководства BS по принятию решения о выборе антенны в системе связи MIMO.
Процесс работы модуля принятия решений DL показан на рисунке 3. На платформе MIMO SDR собирается множество исторических данных. Чтобы создать набор данных, сначала, в качестве предварительной обработки данных, выполняется отбор объектов для идентификации и удаления некоторых нерелевантных атрибутов исторических данных. При выборе объекта выбираются некоторые ключевые атрибуты и представляются в виде вектора объектов. Это улучшит качество набора данных и позволит процессу машинного обучения функционировать более эффективно. Кроме того, для каждого вектора признаков необходима метка, поскольку в машинном обучении используется алгоритм контролируемого обучения. Более конкретно, для нахождения метки каждого вектора признаков будут приняты оптимальные или близкие к оптимальным решения. Следовательно, вектор объектов с одинаковыми решениями принадлежит к одному классу, и будет собрано как можно больше данных по каждому классу. Чтобы построить модель машинного обучения, все выборки в наборе данных случайным образом разбиваются на обучающие и тестовые наборы данных. Обычно 70-90% выборок назначаются в обучающий набор данных, а остальные выборки назначаются в тестовый набор данных. Обучающий набор используется для построения модели машинного обучения, а тестовый набор данных используется для оценки модели. С помощью оптимизации модели может быть построена прогностическая модель, которая будет использоваться для принятия решения на основе новых данных. Более конкретно, с помощью модели машинного обучения высокопроизводительное решение для будущих сценариев реального времени можно искать в автономном режиме и своевременно принимать решение. Все сценарии реального времени преобразуются в математическую задачу многоклассовой классификации, и прогнозирующая модель будет предсказывать один класс для одного нового вектора признаков. Классификатор может быть описан как
l=Classifier(FT),
(1)
where FT
это новый вектор объектов, извлеченный из новых данных, а l - индекс выходного класса, показывающий, что новые данные принадлежат к l-му классу.
Хотя для построения прогнозирующей модели требуются вычислительные ресурсы, вычислительная работа может выполняться в автономном режиме. Более того, новый вектор признаков будет собран и отправлен для обновления набора данных, что очень важно для отслеживания эволюции реальных сценариев, включая поведение пользователей и среду распространения беспроводной связи. Набор данных может быть использован для разработки модели машинного обучения, и вся эта работа также может быть выполнена в нерабочее время.
2.1.2. Логический модуль/Модуль обработки данных
Модуль логики/обработки данных используется в качестве связующего звена между модулем передачи данных и модулем принятия решений глубокого обучения. Во-первых, модуль логики/обработки данных способен отменить заголовок информации, чтобы извлечь полезную нагрузку из полученной информации. Затем полезная нагрузка отправляется в качестве входных данных модуля принятия решений глубокого обучения для интеллектуального вывода решений.
Во-вторых, чтобы улучшить коэффициент использования ресурсов сервера принятия решений DL, мы настроили сервер принятия решений DL как многопоточный сервер, который является асинхронным, управляемым событиями. Следовательно, модуль логики/обработки данных должен справляться с логикой взаимодействия между различными потоками, как показано на рисунке 4. Более конкретно, модуль логики/обработки данных управляет контейнером, который сохраняет состояние драйверов событий и результат принятия решения. Во-первых, модуль инициализирует свое состояние. Затем основной поток в модуле логики/обработки данных выбирает один вспомогательный поток, соответствующий активному драйверу события. Выбранный поток может сгенерировать новое решение DL, изменить состояние результата решения в контейнере и, наконец, завершить работу. Наконец, основной поток считывает решение, сохраненное в контейнере, и передает результат в модуль передачи данных.
2.1.3. Модуль передачи данных
Модуль передачи данных отвечает за подключение сервера принятия решений DL к платформе MIMO SDR по протоколу управления передачей (TCP).
Процесс TCP-соединения между платформой MIMO SDR и сервером принятия решений DL показан на рисунке 5. Благодаря преимуществам TCP, заключающимся в свойстве, ориентированном на подключение, и упорядоченной передаче, сервер принятия решений DL может обеспечить надежную передачу данных с меньшими накладными расходами. В период инициализации системы сервер принятия решений DL запрашивает доступ к платформе MIMO SDR, которая представляет собой модель клиент/сервер. Как только платформа MIMO SDR отправит свой запрос на доступ, она установит соединение с сервером принятия решений DL по протоколу трехстороннего рукопожатия TCP. Затем платформа MIMO SDR может передавать некоторые коммуникационные данные в модуль передачи данных на сервере принятия решений DL, как показано на рисунке 2, в то время как результат принятия решения на сервере принятия решений DL будет отправлен на платформу MIMO SDR через модуль передачи данных.
2.2. Разработка набора данных и нейронной сети для выбора антенны
Мы рассмотрели различные методы машинного обучения для AS, такие как глубокая нейронная сеть (DNN), алгоритм K-ближайших соседей (KNN) и алгоритм экстремального повышения градиента (XGBoost), и результаты демонстрируют, что DNN обладает лучшей производительностью в AS [24]. Поэтому мы используем DNN для построения классификационной модели для выбора антенны MIMO. Процесс внедрения DNN для AS на платформе SDR MIMO представлен в следующих подразделах.
2.2.1. Генерация набора данных
Для построения модели классификации нейронной сети сначала получают набор данных, который состоит из выборок CSI и меток из системы MIMO SDR. Затем система обучает DNN, используя полученный набор данных. Из-за ограничений нашей аппаратной настройки MIMO SDR текущий набор данных измерений поддерживает максимум восемь антенн на базовой станции с двумя пользователями с одной антенной. Таким образом, при появлении нового CSI, используя обученную модель классификации DNN, мы получаем оптимальное подмножество антенн, которое может обеспечить лучшую пропускную способность канала.
Пусть C
обозначим поле комплексных чисел. Во-первых, мы получаем расчетное значение CSI H∈CN×M с платформы MIMO SDR, которое может быть выражено как
H=⎡⎣⎢⎢⎢⎢⎢h11h21⋮hN1h12h22⋮hN2⋯⋯⋱⋯h1Mh2M⋮hNM⎤⎦⎥⎥⎥⎥⎥,
(2)
где hij обозначает (i, j)-й элемент комплексного значения H, а N и M обозначают количество приемных и передающих антенн соответственно. Затем, используя оцененный CSI в качестве выборочных данных, мы используем оптимальный или почти оптимальный результат алгоритма выбора антенны на основе норм (NBAAS), описанного в [22], в качестве соответствующей метки. В системах, основанных на DNN, обучающий набор данных должен представлять собой вещественные числа, в то время как каналы MIMO являются комплекснозначными. В этом случае этапы сбора набора данных суммированы в алгоритме 1:
| Algorithm 1 Dataset acquisition process |
| 1: repeat |
| 2: Convert the estimated CSI matrix H |
to a real-value vector h∈R1×NM as
h=[|h11|,|h12|,⋯,|h1M|,|h21|,|h22|,⋯,|h2M|,⋯,|hNM|].
| (3) |
| 3: Obtain the optimal antenna subset by NBAS. The antenna subset is replaced by the label |
| l∈[l1,l2,⋯,ls] |
, where s=(NNs) and Ns
| denotes the number of selected receive antennas. |
| 4: Convert the label l to one-hot vector z. |
| 5: until All samples are generated |
2.2.2. Проектирование нейронной сети
В модуле DNN мы выбираем использование полностью подключенной нейронной сети для выбора оптимального подмножества антенн, на которое ссылается соответствующая модель DNN и улучшает метод в [24], и это показано на рисунке 6.
Можно видеть, что самостоятельно разработанная модель DNN состоит из входного слоя, двух скрытых слоев и выходного слоя [25]. Входной слой представляет собой входной вектор hj=[h1,⋯,hNM]
где 1×НМ представляет обработанный вещественный CSI в соответствии с уравнением (3). Каждый скрытый слой содержит 500 узлов, и чем больше скрытых слоев, тем сложнее модель. Wi − это весовая матрица, и ее размерность совместно зависит от количества узлов (i - 1)-го уровня и i-го слоя. aij соответствует выходному вектору i-го уровня, и мы обычно используем выпрямленную линейную единицу (ReLU), форма которой равна
f(c)=max(0,c),
(4)
как нелинейная функция активации. Выходной вектор j-го образца в выходном слое может быть выражен как
zˆj=[zˆ1,⋯,zˆs].
(5)
Например, выходной вектор подмножества антенн l-го класса равен
zˆj=⎡⎣⎢0,⋯,0l−1,1,0,⋯,0s−l⎤⎦⎥.
(6)
На этапе обучения нейронной сети вещественнозначная матрица X
и соответствующая матрица Z с одной горячей меткой вводятся в сеть. Для каждого входного сигнала обучающей выборки мы имеем s-мерный вектор zˆ в качестве выходного сигнала. При использовании обучающих выборок K1 алгоритм стохастического градиентного спуска будет использоваться для оптимизации функции потерь перекрестной энтропии между истинной меткой z и прогнозируемой меткой zˆ. Соответствующая функция потерь формулируется как
L(z,zˆ)=1K1∑i=1K1(zilog(zˆi))+(1−zi)log(1−zˆi).
(7)
Кроме того, для дальнейшей оптимизации модели DNN, используемой в предлагаемой автоматизированной системе MIMO, L2
метод регуляризации используется в функции потерь, чтобы избежать переобучения, а модель скользящего среднего вызывается, чтобы сделать конечную модель более надежной.
2.2.3. Реализация сервера принятия решений с глубоким обучением
Как упоминалось в разделе 2.1, сервер принятия решений DL является многопоточным сервером, основанным на асинхронном управлении событиями, что подразумевает, что многопоточная модель может реализовать механизм управления событиями в сервере принятия решений DL. Как упоминалось в разделе 2.1.2, модуль логики/обработки данных в DL decision server управляет контейнером. Этот контейнер, как показано в таблице 1, включает в себя два управляющих сигнала в качестве драйверов событий, “IFCALCULATE” и “ISRESULT”, которые оба инициализируются как false
, и память для сохранения результата принятия решения. На сервере принятия решений DL основной поток всегда подключается к платформе SDR по протоколу TCP, а управляющие сигналы в контейнере используются для управления выполнением вспомогательного потока для обновления результата принятия решения в памяти контейнера.
Логика сервера принятия решений DL в нашей внедренной системе показана на рисунке 7. Более конкретно, когда соединение между сервером принятия решений DL и платформой SDR установлено, основной поток сначала проверяет состояние управляющего сигнала “IFCALCULATE” в контейнере. Если “IFCALCULATE” равно False
, сервер принятия решений DL создал бы один вспомогательный поток для ввода CSI с платформы SDR в модель DNN и обновления состояния результата принятия решения и управляющего сигнала “ISRESULT” в контейнере. Сервер принятия решений DL продолжает проверять состояние управляющего сигнала “ISRESULT”, когда значение “IFCALCULATE” равно True. Если “ISRESULT” равно False, сервер принятия решений DL напрямую выводит результат решения в контейнер. Сервер принятия решений DL выводит обновленный результат принятия решения и устанавливает для “ISRESULT” значение False, чтобы создать вспомогательный поток, когда “ISRESULT” имеет значение True
.
3. Результаты эксперимента и их анализ
В этом разделе наши эксперименты основаны на сконструированной системе связи MIMO-OFDM SDR с поддержкой DLBAS, показанной на рисунке 2 и описанной в разделе 2, где используются восьмиантенная BS и пользователь с одной антенной. Система MIMO SDR оснащена N приемными антеннами, а также необходимыми Ns
выбранные приемные антенны обозначаются (N/Ns
). Чтобы проиллюстрировать производительность канала в системах MIMO с поддержкой DLBAS, в этом разделе для сравнения рассматриваются система MIMO с поддержкой NBAS и система no AS MIMO, как описано в [22]. Кроме того, в наших экспериментах также анализируется точность прогнозирования разработанного нами DNN.
3.1. Производительность модели DNN
Точность тестирования во время обучения разработанной модели DNN для выбора антенны показана на рисунке 8. На рисунке 8 видно, что результаты тестов продолжают расти с увеличением периода обучения, и в последующие периоды обучения они будут оставаться стабильными на уровне около 0,89. Более того, как показано на рисунке 8, точность тестирования близка к достижению соответствия в эпоху 2, что означает, что скорость подгонки данных разработанного DNN очень высока.
Вычислительная сложность нашей модели DNN сравнивается с другими схемами AS в [24]. Для дальнейшей реализации в массивной системе связи MIMO мы рассматриваем временную сложность прогнозирования сети [26]; вычислительная сложность модели DNN может быть представлена в виде
O(M⋅N⋅s)∝O(M⋅N)
(8)
3.2. Результаты DLBA
В различных средах SNR с совершенным CSI сравнение пропускной способности каналов в реальном времени трех типов алгоритмов, DLBA, NBA и no AS, во время функционирования системы показано на рисунке 9. На рисунке 9а показаны возможности этих трех алгоритмов при N=8
, Ns=2, в то время как на рисунке 9b показан один из трех алгоритмов при N=8, Ns=4. На рисунке 9 предлагаемый алгоритм DLBAS приближается к алгоритму NBAS и превосходит no AS, подразумевая, что DLBAS имеет почти ту же производительность по пропускной способности канала, что и NBA. Более конкретно, на рисунке 9a пропускная способность каналов (8/2) системы MIMO SDR с поддержкой DLBA и (8/2) системы MIMO SDR с поддержкой NBA составляет 9 бит/с/Гц при 19 780-й мс, в то время как пропускная способность (2/2) системы MIMO SDR без поддержки NBA составляет около 7,5бит/с/Гц, что показывает прирост производительности примерно на 1,5 бит/с/Гц. Более того, на рисунке 9b пропускная способность каналов (8/4) системы MIMO SDR с поддержкой DLBAS и (8/4) системы MIMO SDR с поддержкой NBAAS совпадает в 10 бит/с/Гц при 18,860-й мс, когда пропускная способность (4/4) системы MIMO SDR без поддержки DLBAS составляет около 8 бит/сс/Гц, который достигает 2 бит/с/Гц
прирост производительности. Более того, на рисунке 9 показано, что DLBAS способен выбирать наилучший вариант выбора антенны в большинстве случаев. Таким образом, экспериментальные результаты на рис. 9a,b демонстрируют, что предлагаемая схема DLBAS работает одинаково со схемой NBAS в различных средах SNR, что подразумевает корректность нашей схемы DLBAS.
В наших экспериментах SNR можно регулировать, изменяя направление антенн или добавляя препятствия в среде беспроводной связи, чтобы добавить шум для построения зависимости измеренной пропускной способности канала от Кривые SNR. Достижимые показатели производительности, зарегистрированные для (8/2)
Система MIMO SDR с поддержкой DLBAS, (8/2) Система MIMO SDR с поддержкой NBAS и (2/2) Система MIMO SDR без поддержки DLBAS при измерении показаны на рисунке 10. Очевидно, что результаты по пропускной способности канала (8/2) системы MIMO SDR с поддержкой DLBA и (8/2) системы MIMO SDR с поддержкой NBA лучше, чем (2/2) системы MIMO SDR без поддержки (2/2) при SNR от 0 до 20 дБ, а среднее увеличение пропускной способности канала составляет около 59%, как показано на рисунке 10. Более конкретно, когда SNR=20 дБ, измеренная пропускная способность (8/2) системы MIMO SDR с поддержкой DLBAS и (8/2) системы MIMO SDR с поддержкой NBAAS составляет около 4,2 бит/с/Гц, а измеренная пропускная способность (2/2) системы MIMO SDR без поддержки DLBAS составляет 2,6 бит/с/Гц, что показывает увеличение пропускной способности канала на 61%. Более того, на рисунке 11 показана зависимость пропускной способности канала от Сравнение кривых SNR между (8/4) системой MIMO SDR с поддержкой DLBA, (8/4) системой MIMO SDR с поддержкой NBA и (4/4) системой MIMO SDR без поддержки NBA для дальнейшего подтверждения той же тенденции увеличения пропускной способности канала при измерении. В частности, результаты измерения пропускной способности канала системы MIMO SDR с поддержкой DLBA (8/4) лучше, чем системы MIMO SDR без поддержки (4/4) по SNR от 0 до 20 дБ, а среднее увеличение пропускной способности канала составляет около 53%. Между тем, при SNR=10 дБ измеренная пропускная способность системы MIMO SDR с поддержкой DLBA (8/4) составляет около 1,5 бит/с/Гц, а системы MIMO SDR без поддержки (4/4) - 0,9 бит/с/Гц, что показывает 70%
увеличение пропускной способности канала.
Однако, по сравнению с рисунком 10, на рисунке 11 показано, что измеренная мощность из (8/4)
Система MIMO SDR с поддержкой NBAS немного выше, чем (8/4) система MIMO SDR с поддержкой DLBAS; например, измеренная пропускная способность при SNR=16 дБ системы (8/4) MIMO SDR с поддержкой NBAS на рисунке 11 примерно на 0,2 бит/Гц выше, чем (8/4) система MIMO SDR с поддержкой DLBAS. на рисунке 11, поскольку (8/4) системе MIMO SDR с поддержкой DLBA требуется больше классов, чем (8/2)
Система MIMO SDR с поддержкой DLBAS в модели классификации DNN, что приводит к снижению точности тестирования. В целом, результаты системы MIMO SDR с поддержкой NBAS и системы MIMO SDR с поддержкой DLBAS на рисунке 11 по-прежнему близки.
4. Выводы
В этой статье разработана и внедрена система MIMO SDR с поддержкой DLBAS. Благодаря использованию простой, но эффективной концепции сервера принятия решений DL на платформе MIMO SDR все сценарии реального времени преобразуются в математическую задачу многоклассовой классификации. Благодаря передаче по протоколу TCP вся работа по принятию решений AS может выполняться онлайн с очень низкой задержкой. Результаты эксперимента подтвердили, что система MIMO SDR с поддержкой DLBAS способна достигать почти оптимальной производительности платформы MIMO SDR с поддержкой NBAS, которая демонстрирует значительные улучшения по сравнению с платформой MIMO SDR без AS, а средний прирост пропускной способности канала превышает 53%
. Эта новая реализация системы MIMO SDR с поддержкой DLBAS обеспечит практическую среду проверки для нового проектирования и эволюции других новых алгоритмов AS в системе связи MIMO. Наша будущая работа заключается в применении этой основы реализации к реальной массивной системе MIMO, для которой потребуется больше USRP для поддержки по крайней мере 32 антенн на базовой станции, а также большего количества пользовательских узлов. Чтобы сохранить точность результата выбора антенны, модели DNN, показанной на рис. 6, возможно, потребуется добавить больше слоев и больше узлов в каждом слое. Это потребует большего количества измеренных наборов данных и увеличенного времени обучения модели DNN, но, согласно уравнению (8), время выполнения генерации AS decision немного увеличится.
Авторский вклад
Концептуализация, S.Z.; Обработка данных, J.X.; Формальный анализ, H.L.; Администрирование проекта, P.Z.; Проверка, J.Z. и L.H.; Расследование, T.Y.; и написание оригинального проекта, H.F. Все авторы прочитали опубликованную версию рукописи и согласились с ней.
Финансирование
Эта работа была частично поддержана Фондом естественных наук Китая в рамках грантов 61601304, U1713217, U1501253, 61801297, 61801302 и 61702335; частично Фондом Шэньчжэня в рамках грантов JCYJ20170302142545828 и JCYJ20180305124721920; и частично Фондом Шэньчжэньского университета в рамках грантов 2016057, 2019119 и 2019120.
Конфликты интересов
Авторы заявляют об отсутствии конфликта интересов.
Рекомендации
Wang, C.; Haider, F.; Gao, X.; Yang, Y.; Yuan, D.; Aggoune, H.M.; Haas, H.; Fletcher, S.; Hepsaydir, E. Cellular architecture and key technologies for 5G wireless communication networks. IEEE Commun. Mag. 2014, 52, 122–130. [Google Scholar] [CrossRef][Green Version]
Thompson, J.; Ge, X.; Wu, H.; Irmer, R.; Jiang, H.; Fettweis, G.; Alamouti, S. 5G wireless communication systems: Prospects and challenges [Guest Editorial]. IEEE Commun. Mag. 2014, 52, 62–64. [Google Scholar] [CrossRef]
Basar, R. Reconfigurable Intelligent Surface-Based Index Modulation: A New Beyond MIMO Paradigm for 6G. IEEE Trans. Commun. 2020, 68, 3187–3196. [Google Scholar] [CrossRef][Green Version]
Hussein, H.S.; Hussein, S.; Mohamed, E.M. Efficient channel estimation techniques for MIMO systems with 1-bit ADC. China Commun. 2020, 17, 50–64. [Google Scholar] [CrossRef]
Nitsu, T.; Nakabayashi, H. A Study of User Capacity for Massive MIMO in Urban Street Canyon Environment. In Proceedings of the 2018 IEEE International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Nagoya, Japan, 29–31 August 2018; pp. 1–2. [Google Scholar] [CrossRef]
Liu, X.; Huang, T.; Shlezinger, N.; Liu, Y.; Zhou, J.; Eldar, Y.C. Joint Transmit Beamforming for Multiuser MIMO Communications and MIMO Radar. IEEE Trans. Signal Process. 2020, 68, 3929–3944. [Google Scholar] [CrossRef]
Gao, Y.; Vinck, H.; Kaiser, T. Massive MIMO Antenna Selection: Switching Architectures, Capacity Bounds, and Optimal Antenna Selection Algorithms. IEEE Trans. Signal Process. 2018, 66, 1346–1360. [Google Scholar] [CrossRef]
Takemura, N.; Honma, N.; Kawagoe, A. Improvement of Interference Suppression Performance Using Antenna Selection of Mobile Terminal for Full-Duplex 4×4 MIMO System. IEEE Trans. Antennas Propag. 2020, 17, 4186–4195. [Google Scholar] [CrossRef]
Ibrahim, M.S.; Konar, A.; Sidiropoulos, N.D. Fast Algorithms for Joint Multicast Beamforming and Antenna Selection in Massive MIMO. IEEE Trans. Signal Process. 2020, 68, 1897–1909. [Google Scholar] [CrossRef][Green Version]
He, D.; Liu, C.; Quek, T.Q.S.; Wang, H. Transmit Antenna Selection in MIMO Wiretap Channels: A Machine Learning Approach. IEEE Wirel. Commun. Lett. 2018, 7, 634–637. [Google Scholar] [CrossRef]
Joung, J. Machine learning-based antenna selection in wireless communications. IEEE Commun. Lett. 2016, 20, 2241–2244. [Google Scholar] [CrossRef]
Liao, Y.; Yao, H.; Hua, Y.; Li, C. CSI Feedback Based on Deep Learning for Massive MIMO Systems. IEEE Access 2019, 7, 86810–86820. [Google Scholar] [CrossRef]
Cai, J.X.; Zhong, R.; Li, Y. Antenna selection for multiple-input multiple-output systems based on deep convolutional neural networks. PLoS ONE 2019, 14, e0215672. [Google Scholar] [CrossRef] [PubMed]
O’Shea, T.J.; Erpek, T.; Clancy, T.C. Deep Learning Based MIMO Communications. arXiv 2017, arXiv:1707.07980. [Google Scholar]
Ma, X.; Gao, Z. Data-Driven Deep Learning to Design Pilot and Channel Estimator for Massive MIMO. IEEE Trans. Veh. Technol. 2020, 69, 5677–5682. [Google Scholar] [CrossRef][Green Version]
Elbir, A.M.; Mishra, K.V. Joint Antenna Selection and Hybrid Beamformer Design Using Unquantized and Quantized Deep Learning Networks. IEEE Trans. Wireless Commun. 2020, 19, 1677–1688. [Google Scholar] [CrossRef][Green Version]
Huang, H.; Song, Y.; Yang, J.; Gui, G.; Adachi, F. Deep-Learning-Based Millimeter-Wave Massive MIMO for Hybrid Precoding. IEEE Trans. Veh. Technol. 2019, 68, 3027–3032. [Google Scholar] [CrossRef][Green Version]
Alrabeiah, M.; Alkhateeb, A. Deep Learning for TDD and FDD Massive MIMO: Mapping Channels in Space and Frequency. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 1465–1470. [Google Scholar] [CrossRef][Green Version]
Klautau, A.; Batista, P.; González-Prelcic, N.; Wang, Y.; Heath, R.W. 5G MIMO Data for Machine Learning: Application to Beam-Selection Using Deep Learning. In Proceedings of the 2018 Information Theory and Applications Workshop (ITA), San Diego, CA, USA, 11–16 February 2018; pp. 1–9. [Google Scholar] [CrossRef]
An, W.; Zhang, P.; Xu, J.; Luo, H.; Huang, L.; Zhong, S. A Novel Machine Learning Aided Antenna Selection Scheme for MIMO Internet of Things. Sensors 2020, 20, 2250. [Google Scholar] [CrossRef]
Arun Kumar, K.A. ARM-FPGA Implementation of a Partially Reconfigurable OFDM-MIMO Phy-Link. In Proceedings of the 2018 International CET Conference on Control, Communication, and Computing (IC4), Thiruvananthapuram, India, 5–7 July 2018; pp. 288–292. [Google Scholar] [CrossRef]
Zhang, P.; Xu, J.; Zhong, S.; Feng, H.; Huang, L.; Yuan, T.; Zhang, J. Design of Reconfigurable SDR Platform for Antenna Selection Aided MIMO Communication System. IEEE Access 2019, 7, 169267–169280. [Google Scholar] [CrossRef]
Zhong, S.; Feng, H.; Zhang, P.; Xu, J.; Huang, L.; Yuan, T.; Huo, Y. User Oriented Transmit Antenna Selection in Massive Multi-User MIMO SDR Systems. Sensors 2020, 20, 4867. [Google Scholar] [CrossRef]
Luo, H.; Xu, J.; Zhang, J.; Zhang, P.; Huang, L. Deep Learning Based Antenna Selection Aided Space-Time Shift Keying Systems. In Proceedings of the 2019 International Conference on Artificial Intelligence and Computer Science (AICS 2019), New York, NY, USA, 12–13 July 2019; pp. 409–413. [Google Scholar] [CrossRef]
Yang, P.; Xiao, Y.; Xiao, M.; Guan, Y.L.; Li, S.; Xiang, W. Adaptive Spatial Modulation MIMO Based on Machine Learning. IEEE J. Sel. Areas Commun. 2019, 37, 2117–2131. [Google Scholar] [CrossRef]
Han, S.; Pool, J.; Tran, J.; Dally, W.J. Learning both Weights and Connections for Efficient Neural Networks. arXiv 2015, arXiv:1506.02626. [Google Scholar]
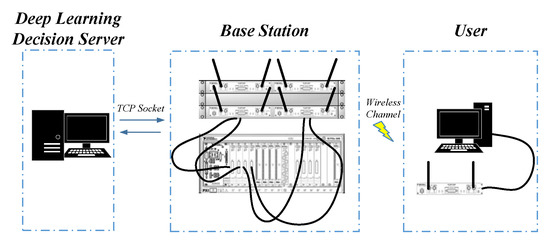
Рисунок 1. Системная структура DLB AS-aided MIMO SDR system.
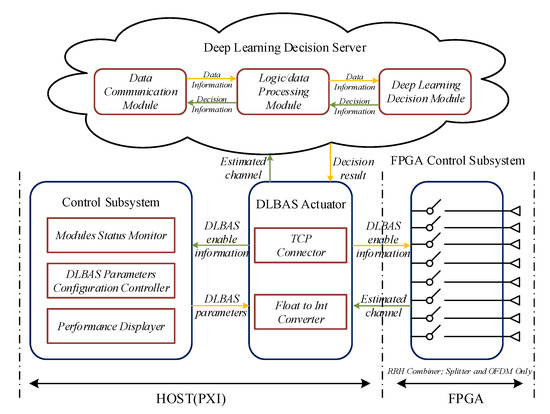
Рисунок 2. Структура системы MIMO SDR с поддержкой DLBAS.
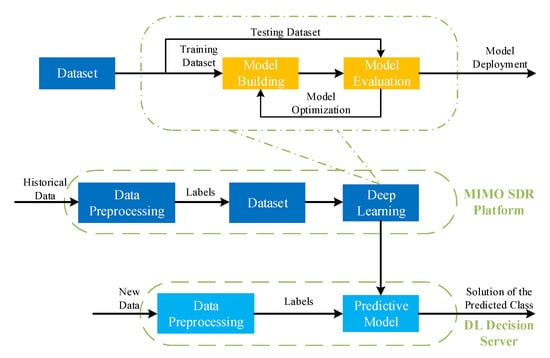
Рисунок 3. Процесс проектирования модуля принятия решений DL.
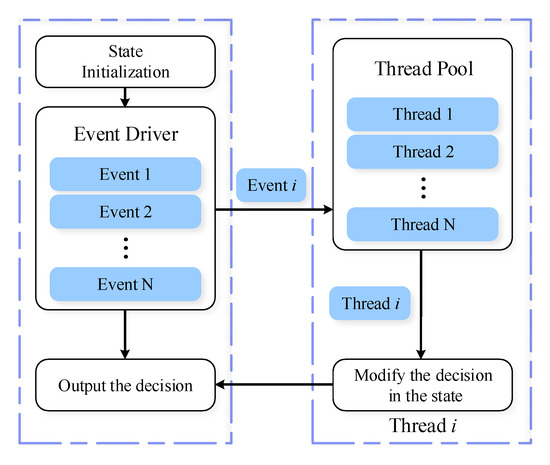
Рисунок 4. Процесс многопоточной логики.
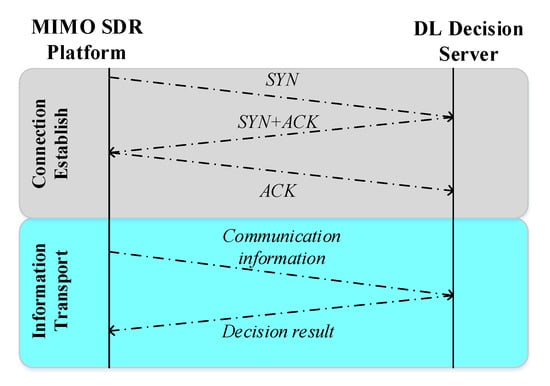
Рисунок 5. Процесс TCP-соединения между платформой MIMO SDR и сервером принятия решений DL.
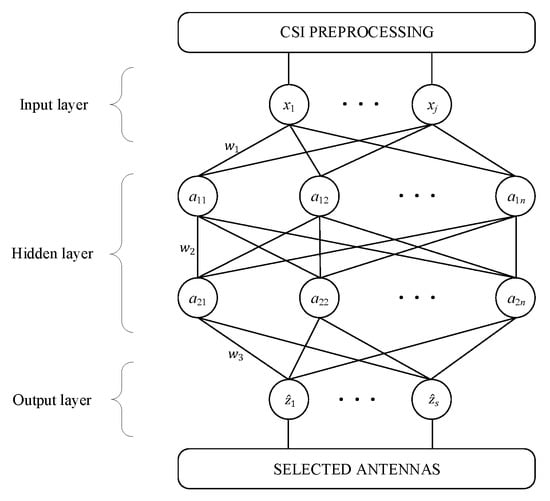
Рисунок 6. Структура самостоятельно разработанной нейронной сети для выбора антенны.
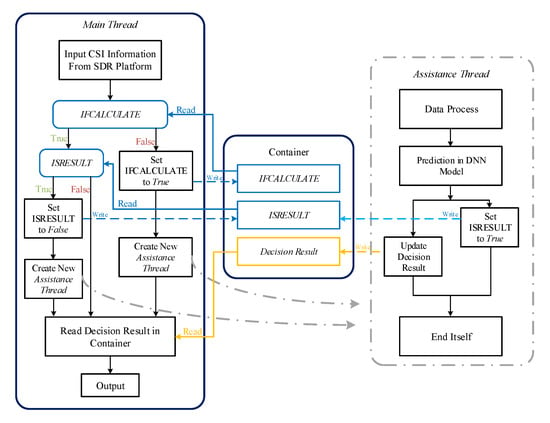
Рисунок 7. Логика сервера принятия решений DL в системе MIMO SDR с поддержкой DLBAS.
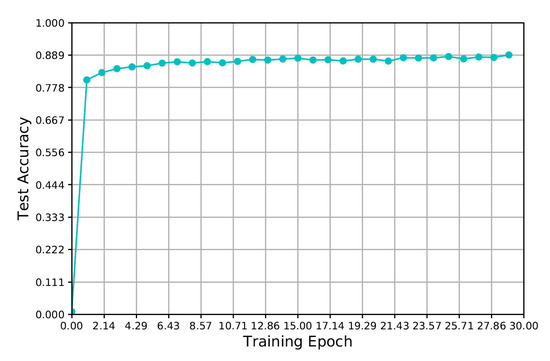
Рисунок 8. Тенденции точности тестирования разработанной модели DNN.
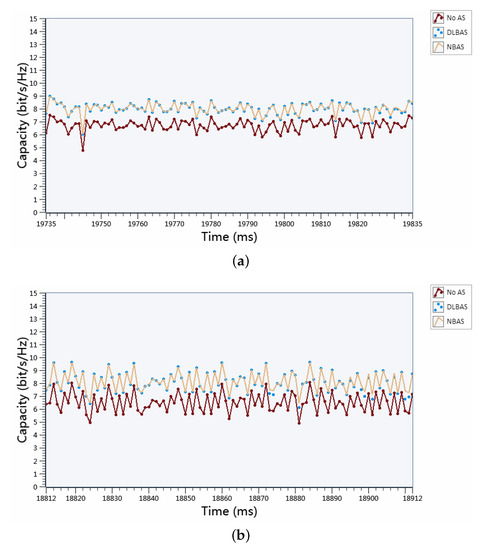
Рисунок 9. Сравнение пропускной способности каналов в реальном времени: (а) (8/2)
Система MIMO SDR с поддержкой DLBAS, (8/2) Система MIMO SDR с поддержкой NBAS и (2/2) система MIMO SDR без поддержки NBAS; и (b) (8/4) Система MIMO SDR с поддержкой DLBAS, (8/4) Система MIMO SDR с поддержкой NBAS и (4/4)
нет встроенной системы MIMO SDR.
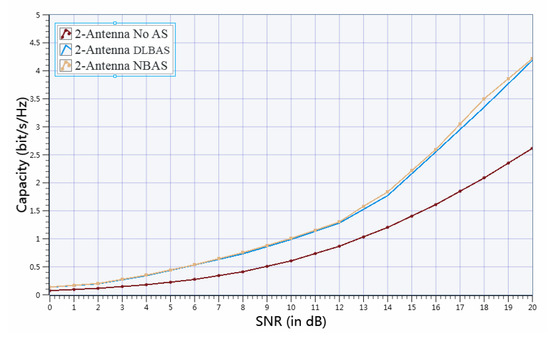
Рисунок 10. Результат измерения при сравнении пропускной способности канала между (8/2)
Система MIMO SDR с поддержкой DLBAS, (8/2) Система MIMO SDR с поддержкой NBAS и (2/2)
нет встроенной системы MIMO SDR.
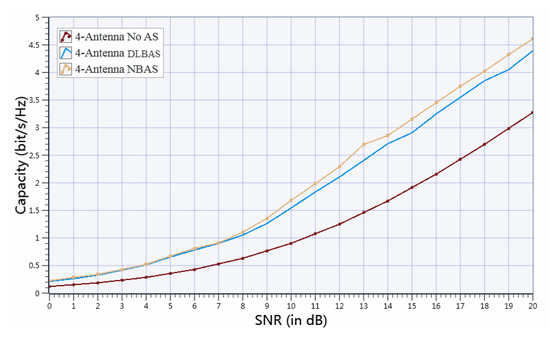
Figure 11. Measurement result of channel capacity comparison among (8/4)
DLBAS-aided MIMO SDR system, (8/4) NBAS-aided MIMO SDR system, and (4/4)
no AS-aided MIMO SDR system.
Источник: www.mdpi.com