Texformer: оценка 3D-позы на основе трансформера
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2021-11-09 11:31

Texformer — фреймворк для оценки 3D-позы по одному изображению с использованием архитектуры трансформера. Точность восстановления позы у Texformer выше, чем у state-of-the-art моделей на основе сверточных нейросетей.
Архитектура модели приведена на рисунке ниже. Модуль внимания состоит из трех элементов:
- запросом является вычисленная заранее цветовая карта, получаемая путем проецирования координат стандартной трехмерной поверхности человека на UV-пространство.
- значением являются входное изображение и его двумерные координаты;
- ключом являются входное изображение и двумерная карта сегментации.
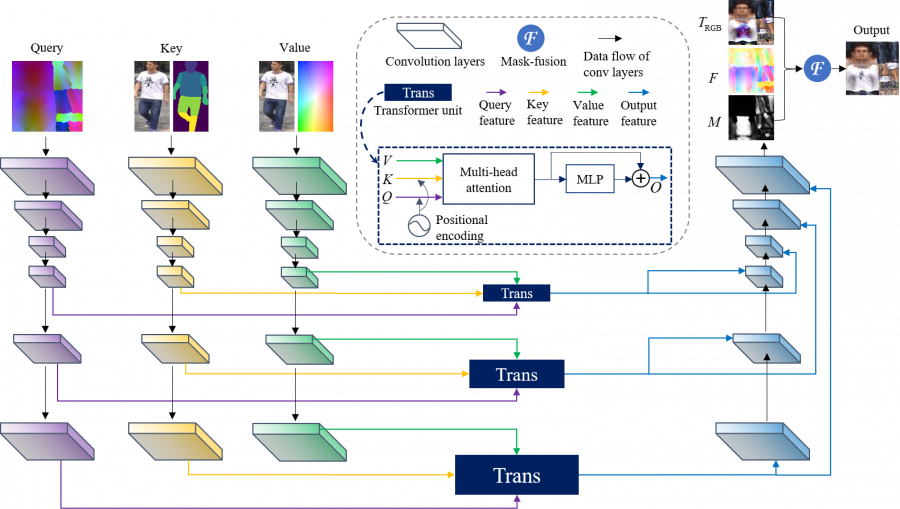
Запрос, значение и ключ заводятся в три сверточные нейросети для трансформации в пространстве признаков. Затем данные признаки заводятся в трансформер для генерации выходных признаков, которые обрабатываются в другой сверточной нейросети, генерирующей RGB UV-карту, текстуру и маску. Финальная выходная UV-карта получается путем наложения RGB-карты и текстуры с помощью маски.
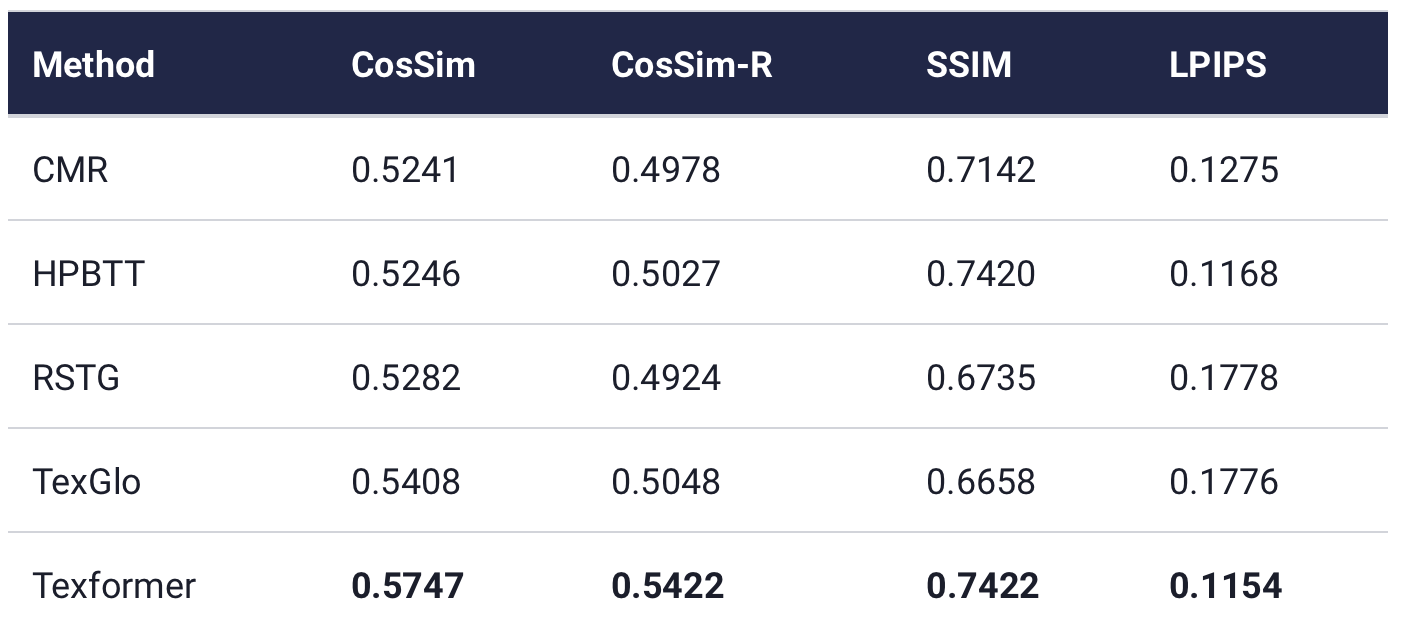
Сравнение Texformer с моделями на основе сверточных нейросетей:
Фреймворк доступен в Github.
Источник: neurohive.io