Torch-Points3D: библиотека для глубокого обучения на 3D облаках точек
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2020-11-10 06:32

Torch-Points3D — это опенсорсный модульный фреймворк для обучения нейросетевых моделей на 3D облаках точек. Библиотека призвана облегчить процесс обработки данных и построение пайплайнов для обучения моделей.
Подробнее про библиотеку
Фреймворк предоставляет стандартизированный интерфейс для обучения нейросетей, адаптированными под работу с данными облаков точек. Простота интерфейса снижает порог входа для проведения экспериментов на данных такого формата и делает процесс дизайна экспериментов быстрее.
Согласно разработчикам, фреймворк отличается от существующих аналогов для обработки данных 3D облаков точек: Pytorch3D, Kaolin и Det3D. Torch-Points3D объединяет разные задачи, нейросетевые архитектуры и датасеты, поэтому является более гибким для исследовательских задач. Библиотека основана на фреймворке для глубокого обучения Pytorch и на библиотеке для обработки 3D данных pytorch-geometric.
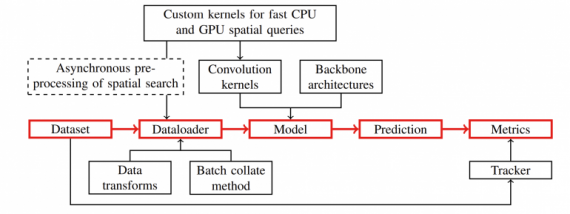
Torch-Points3D имеет функционал для решения таких задач, как классификация, сегментация, распознавание объектов, регистрация облаков точек, заполнение и другие. Доступные архитектуры нейросетевых моделей включают в себя PointNet, PointNet++, PointCNN, RSConv, VoteNet и PPNet. Среди доступных датасетов — Scannet, S3DIS, Shapenet, SemanticKitty, 3DMatch, ModelNet и Kitty Odometry.
Детали про архитектуру библиотеки, интерфейс и примеры использования доступны в открытом репозитории на GitHub.
Телеграм: t.me/ainewsline
Источник: neurohive.io