Управляемая разумом роботизированная рука впервые эффективно работает без мозговой имплантации - PreAbility
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2020-07-18 10:06
работа головного мозга, Нейроинтерфейс, новости робототехники

Команда американских исследователей сделала прорыв в области неинвазивного управления роботизированными устройствами. Используя интерфейс мозг-компьютер, они разработали первую в мире управляемую разумом роботизированную руку, которая способна непрерывно и плавно следовать за курсором компьютера. Вероятно, это научное открытие будет применяться в разработке технологий для людей с инвалидностью. Оно позволит создавать искусственные конечности, системы управления экзоскелетами для людей с травмами позвоночника, неврологическими заболеваниями и пр.
Исследования проводила группа из Университета Карнеги-Меллона в сотрудничестве с Университетом Миннесоты.
Возможность неинвазивного управления роботизированными устройствами с использованием только мысли может найти широкое применение, в частности в жизни парализованных пациентов или людей с двигательными нарушениями.
Если роботизированными устройствами управлять с высокой точностью, то они могут использоваться для выполнения различных повседневных задач. Но до сих пор интерфейс мозг-компьютер достигал хороших показателей управления роботизированными устройствами, только если использовались сигналы, воспринимаемые от мозговых имплантатов.
Установка, настройка и эксплуатация мозговых имплантатов требуют значительного медицинского и хирургического опыта от персонала. Не говоря уже о стоимости и потенциальных рисках для пациента. Поэтому реальное применение инвазивной технологии было ограничено лишь несколькими клиническими случаями.
Главная задача исследований интерфейса мозг-компьютер заключается в разработке менее инвазивной или даже полностью неинвазивной технологии, которая позволила бы парализованным пациентам контролировать объекты окружающего пространства или роботизированные конечности с помощью собственных «мыслей». Такая неинвазивная технология в случае успеха принесла бы столь необходимую технологию для многочисленных пациентов и даже для населения в целом.
Обычно интерфейсы, которые используют неинвазивное внешнее зондирование, а не мозговые имплантаты, получают «более грязные» сигналы. Это приводит к низкому разрешению и менее точному контролю. Поэтому при управлении роботизированной рукой неинвазивный интерфейс не выдерживал конкуренции с использованием имплантированных устройств.
Несмотря на это, исследователи интерфейса сделали ставку на неинвазивную технологию, которая могла бы стать массовой. К этой цели приблизился Бин Хе, профессор биомедицинской инженерии в Университете Карнеги-Меллона и его команда.
«Успехи в управлении роботизированными устройствами с использованием мозговых имплантатов — это отличное научное достижение», — говорит он. «Но конечная цель — неинвазивная технология. Достижения в области нейронного декодирования для неинвазивного управления роботизированной рукой будет иметь большое значение для развития нейророботики».
Используя новые методы восприятия и машинного обучения, в его лаборатории удалось получить доступ к сигналам глубоко внутри мозга. При этом достигнуто высокое разрешение управления роботизированной рукой. Благодаря неинвазивной нейровизуализации и новой парадигме непрерывного наведения, интерфейс на основе ЭЭГ может справиться даже с шумными сигналами. Это значительно улучшает нейронное декодирование и облегчает непрерывное управление роботизированными устройствами в режиме 2D и в реальном времени.
Используя неинвазивный интерфейс мозг-компьютер для управления роботизированной рукой, которая отслеживает курсор на экране монитора, человек впервые показал, что роботизированная рука может непрерывно следовать за перемещением стрелки. Стоит учесть, что до сих пор роботизированные руки, контролируемые людьми неинвазивно, следовали за движущимся курсором резкими, прерывистыми движениями — как будто роботизированная рука пыталась «догнать» команды мозга — теперь рука следует за курсором гладкими, непрерывными перемещениями.
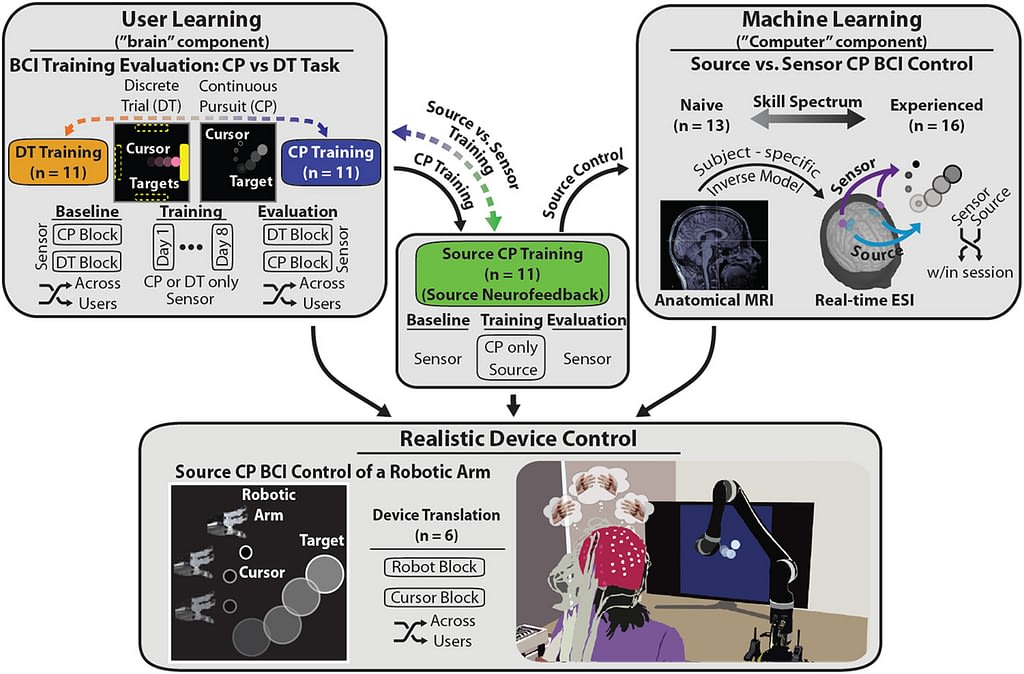
В статье, опубликованной в Science Robotics, команда создала новую платформу, которая направлена на улучшение «мозговых» и «компьютерных» компонентов интерфейса за счет большей вовлеченности пользователей в их обучение, а также пространственного разрешения неинвазивных нейронных данных посредством визуализации источников ЭЭГ. ,
В статье «Неинвазивная нейровизуализация улучшает непрерывное нейронное слежение для управления роботизированными устройствами» описывается, как уникальный подход группы исследователей к решению этой проблемы не только улучшил обучение интерфейса почти на 60% для стандартной задачи Centre-Out (тест на точность позиционирования курсора), но также улучшил непрерывное отслеживание компьютерного курсора более чем на 500%.
«Эта работа представляет собой важный шаг в разработке неинвазивных интерфейсов между мозгом и компьютером — технологии, которая когда-нибудь может стать повсеместной как смартфоны и помогать всем нам», — говорит Бин Хе, начальник отдела биомедицинской инженерии. Люди получат безопасный неинвазивный способ взаимодействия с окружающей средой при помощи мысли.
На сегодняшний день технология была опробована на 68 здоровых людях (до 10 сеансов для каждого человека), включая управление виртуальным устройством и управление роботизированной рукой для непрерывного отслеживания. Технология вполне применима и для пациентов, команда планирует провести клинические испытания в ближайшем будущем. «Несмотря на технические проблемы с использованием неинвазивных сигналов, мы полностью привержены идее донести эту безопасную и экономичную технологию до людей, которым она нужна», — говорит Бин Хе.
Телеграм: t.me/ainewsline
Источник: preability.com