Вспоминаем алгоритм Дейкстры
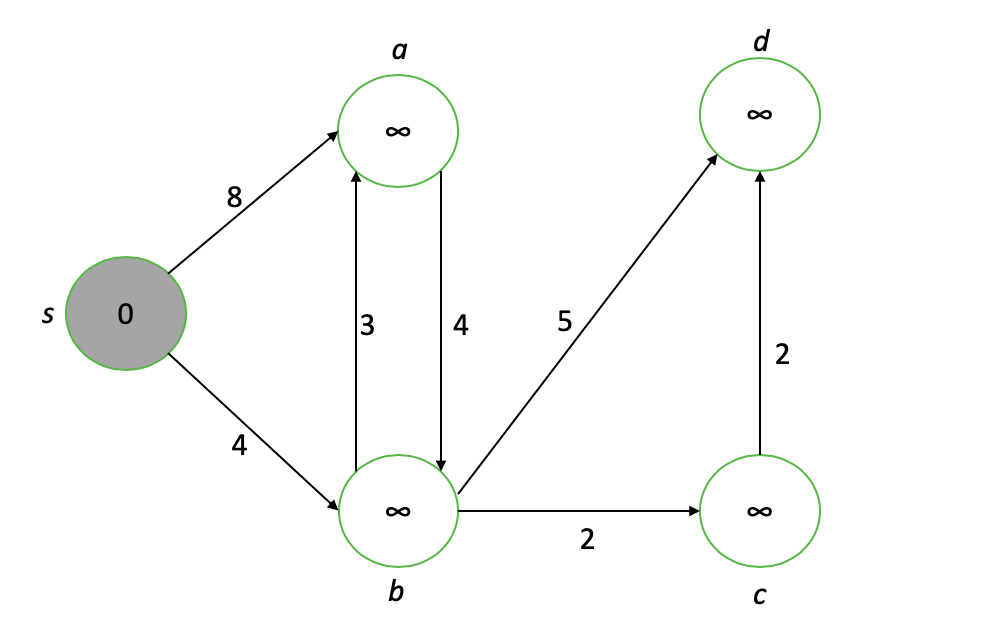
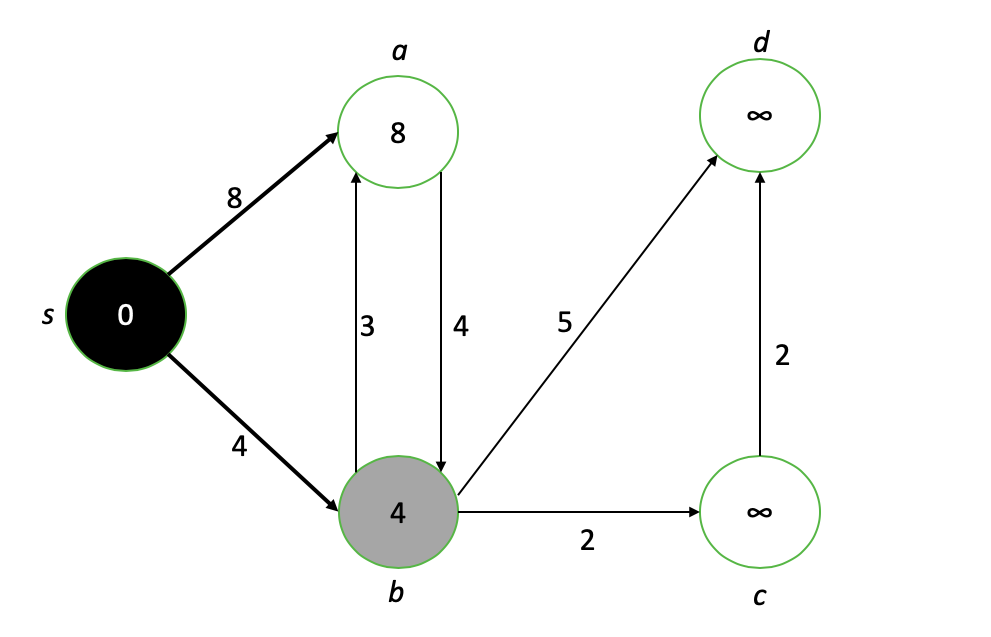
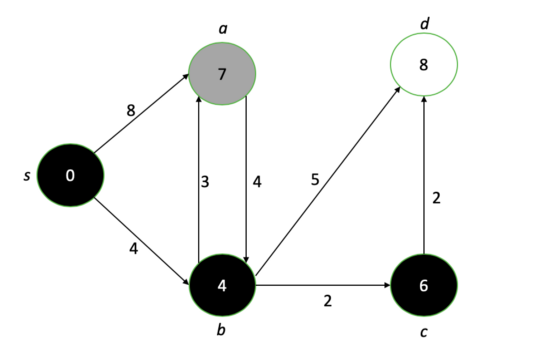
Алгоритм Дейкстры — один из наиболее популярных алгоритмов теории графов. Он используется для поиска кратчайшего пути между узлами на ориентированном графе. Мы начнем с исходного узла и известных длин ребер между узлами.
Сначала мы присваиваем значение расстояния от источника всем узлам. Узел s получает значение 0, потому что это источник; остальные получают значения ? для начала.



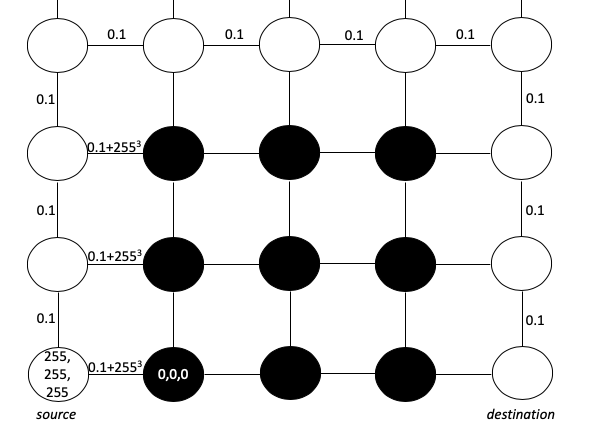
Концептуализация изображений лабиринта


Реализация
Мы можем использовать OpenCV, популярную библиотеку компьютерного зрения для Python, чтобы извлечь значения пикселей и показать наши изображения лабиринта. Давайте также определим координаты нашего начального и конечного местоположений, добавив точки в наш лабиринт
import cv2 import matplotlib.pyplot as plt import numpy as np img = cv2.imread('maze.png') # read an image from a file using cv2.circle(img,(5,220), 3, (255,0,0), -1) # add a circle at (5, 220) cv2.circle(img, (25,5), 3, (0,0,255), -1) # add a circle at (5,5) plt.figure(figsize=(7,7)) plt.imshow(img) # show the image plt.show()
class Vertex: def __init__(self,x_coord,y_coord): self.x=x_coord self.y=y_coord self.d=float('inf') #current distance from source node self.parent_x=None self.parent_y=None self.processed=False self.index_in_queue=NoneНам нужно создать матрицу вершин, представляющую двухмерное расположение пикселей на изображении. Это будет основой для алгоритма Дейкстры. Мы также поддерживаем очередь с минимальной кучей приоритетов для отслеживания необработанных узлов.
def find_shortest_path(img,src,dst): pq=[] #min-heap priority queue imagerows,imagecols=img.shape[0],img.shape[1] matrix = np.full((imagerows, imagecols), None) #access matrix elements by matrix[row][col] #fill matrix with vertices for r in range(imagerows): for c in range(imagecols): matrix[r][c]=Vertex(c,r) matrix[r][c].index_in_queue=len(pq) pq.append(matrix[r][c]) #set source distance value to 0 matrix[source_y][source_x].d=0 #maintain min-heap invariant (minimum d Vertex at list index 0) pq = bubble_up(pq, matrix[source_y][source_x].index_in_queue)Нам нужно несколько вспомогательных функций, чтобы помочь найти ребра и длину ребер между вершинами:
#Implement euclidean squared distance formula def get_distance(img,u,v): return 0.1 + (float(img[v][0])-float(img[u][0]))**2+(float(img[v][1])-float(img[u][1]))**2+(float(img[v][2])-float(img[u][2]))**2 #Return neighbor directly above, below, right, and left def get_neighbors(mat,r,c): shape=mat.shape neighbors=[] #ensure neighbors are within image boundaries if r > 0 and not mat[r-1][c].processed: neighbors.append(mat[r-1][c]) if r < shape[0] - 1 and not mat[r+1][c].processed: neighbors.append(mat[r+1][c]) if c > 0 and not mat[r][c-1].processed: neighbors.append(mat[r][c-1]) if c < shape[1] - 1 and not mat[r][c+1].processed: neighbors.append(mat[r][c+1]) return neighborsТеперь мы можем реализовать алгоритм Дейкстры и присвоить значения расстояния (d) всем вершинам пикселей в изображении лабиринта:
while len(pq) > 0: u=pq[0] #smallest-value unprocessed node #remove node of interest from the queue pq[0]=pq[-1] pq[0].index_in_queue=0 pq.pop() pq=bubble_down(pq,0) #min-heap function, see source code u.processed=True neighbors = get_neighbors(matrix,u.y,u.x) for v in neighbors: dist=get_distance(img,(u.y,u.x),(v.y,v.x)) if u.d + dist < v.d: v.d = u.d+dist v.parent_x=u.x #keep track of the shortest path v.parent_y=u.y idx=v.index_in_queue pq=bubble_down(pq,idx) pq=bubble_up(pq,idx)Теперь мы можем вызвать функцию кратчайшего пути и нарисовать решение в нашем лабиринте:
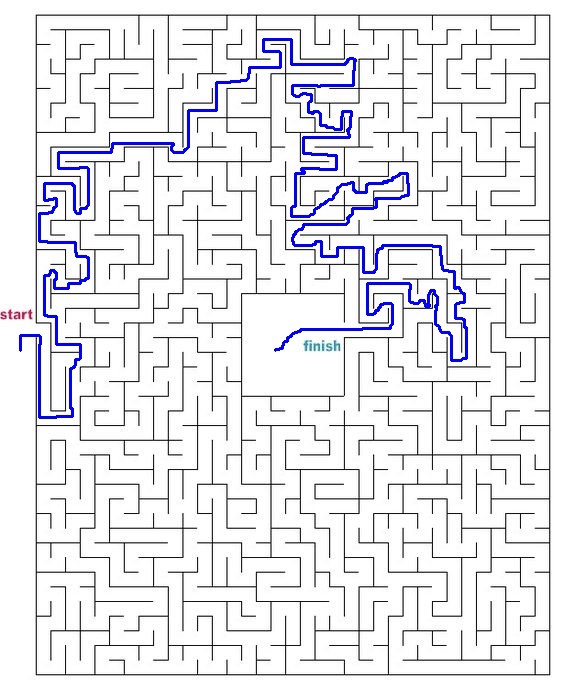
img = cv2.imread('maze.png') # read an image from a file using opencv (cv2) library p = find_shortest_path(img, (25,5), (5,220)) drawPath(img,p) plt.figure(figsize=(7,7)) plt.imshow(img) # show the image on the screen plt.show()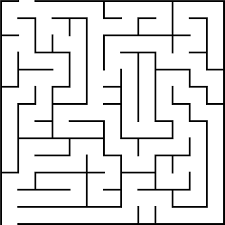
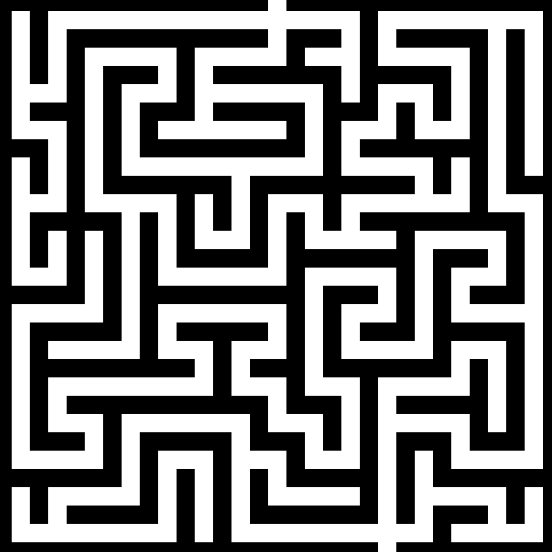
 Давайте попробуем другие лабиринты со всего Интернета.
Давайте попробуем другие лабиринты со всего Интернета.