Рынок eye-tracking'а, как ожидается, будет расти и расти: с $560 млн в 2020 до $1,786 млрд в 2025. Так какая есть альтернатива относительно дорогим устройствам? Конечно, простая вебка! Как и другие, этот подход встречает много сложностей, будь то: большое разнообразие устройств (следовательно, сложно подобрать настройки, которые будут работать на всех камерах одинаково), сильная вариативность параметров (от освещения до наклона камеры и ее положения относительно лица), порядочные вычислительные мощности (несколько cuda-ядер и Xeon — самое то)...
Хотя подождите-ка, действительно ли надо тратиться на топовое железо да еще и видеокарту закупать? Может, есть способ уместить все вычисления на cpu и не потерять при этом в скорости?
(Well, если бы не было такого способа, то не было бы и статьи про то, как обучить нейронку на PyTorch)
Как всегда в data science, самый важный вопрос. Спустя некоторое время поисков я нашел датасет MPIIGaze. Авторы статьи предложили много классных способ его обработки (например, нормализацию положения головы), но мы пойдем простым путем.
Итак, запускаем Colab, загружаем ноутбук и стартуем:
# импорт библиотек import os import numpy as np import pandas as pd import scipy import scipy.io from PIL import Image import cv2 import seaborn as sns import matplotlib import matplotlib.pyplot as pltВ Colab'е можно юзать системные утилиты прямо из ноутбука, соу, скачиваем и распаковываем датасет:
!wget https://datasets.d2.mpi-inf.mpg.de/MPIIGaze/MPIIGaze.tar.gz !tar xvzf MPIIGaze.tar.gz MPIIGazeВ папке Data/Original находятся изображения наших человеков. Всего их было 15, и для каждого есть фотографии с нескольких дней эксперимента. Папка Annotation Subset содержит аннотации к каждой фотографии, каждая аннотация — набор лицевых точек и положения зрачков на фотографии. Авторы статьи заботливо оставили их без header'а, поэтому сейчас будем смотреть, какие чиселки каким лицевым точкам соответствуют.
database_path = "/content/MPIIGaze" # функция для загрузки фотографий одного человека def load_image_data(patient_name): global database_path annotation_path = os.path.join(database_path, "Annotation Subset", patient_name + ".txt") data_folder = os.path.join(database_path, "Data", "Original", patient_name) annotation = pd.read_csv(annotation_path, sep=" ", header=None) points = np.array(annotation.loc[:, list(range(1, 17))]) filenames = np.array(annotation.loc[:, [0]]).reshape(-1) images = [np.array(Image.open(os.path.join(data_folder, filename))) for filename in filenames] return images, pointsimages, points = load_image_data("p00")plt.imshow(images[0]) colors = ["r", "g", "b", "magenta", "y", "cyan", "brown", "lightcoral"] for i in range(0, len(points[0]), 2): x, y = points[0, i:i+2] # вот туть мне удалось понять, что координаты точек хранятся по 2, причем в формате X, Y plt.scatter([x], [y], c=colors[i//2])Получился вот такой красавец:
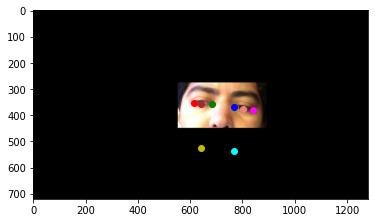
Агась, запоминаем порядок: сначала крайние точки правого глаза, затем крайние точки левого глаза, потом рот и затем правый и левый зрачки.
Окей, грузим фотографии. Так как у нас есть только крайние точки глаза, я сделал такое предположение: пусть у нас есть область, которая содержит глаз (ну, и часть лица, разумеется), тогда ширина этой области относится к ее высоте, как 2:1. Поэтому будем вырезать прямоугольник 2 к 1 из той большой фотографии, что у нас имеется.
# функция расстояния между двумя точками def distance(x1, y1, x2, y2): return int(((x1 - x2) ** 2 + (y1 - y2) ** 2) ** 0.5) image_shape = (16, 32) # здесь вырезаем из большой картинки глаз и находим относительное положение зрачка # это понадобится позже def handle_eye(image, p1, p2, pupil): global image_shape line_len = distance(*p1, *p2) # x, y -> y, x p1 = p1[::-1] p2 = p2[::-1] pupil = pupil[::-1] corner1 = p1 - np.array([line_len//4, 0]) corner2 = p2 + np.array([line_len//4, 0]) sub_image = image[corner1[0]:corner2[0]+1, corner1[1]:corner2[1]+1] pupil_new = pupil - corner1 pupil_new = pupil_new / sub_image.shape[:2] sub_image = cv2.resize(sub_image, image_shape[::-1], interpolation=cv2.INTER_AREA) sub_image = cv2.cvtColor(sub_image, cv2.COLOR_RGB2GRAY) return sub_image, pupil_newНа одной картинке у нас 2 глаза, поэтому для удобства — еще одна функция:
def image_to_train_data(image, points): eye_right_p1 = points[0:2] eye_right_p2 = points[2:4] eye_right_pupil = points[12:14] right_image, right_pupil = handle_eye(image, eye_right_p1, eye_right_p2, eye_right_pupil) eye_left_p1 = points[4:6] eye_left_p2 = points[6:8] eye_left_pupil = points[14:16] left_image, left_pupil = handle_eye(image, eye_left_p1, eye_left_p2, eye_left_pupil) return right_image, right_pupil, left_image, left_pupilДавайте посмотрим (и на нас посмотрят в ответ):
# обработаем одну картинку right_image, right_pupil, left_image, left_pupil = image_to_train_data(images[10], points[10]) plt.imshow(right_image, cmap="gray") r_p_x = int(right_pupil[1] * image_shape[1]) r_p_y = int(right_pupil[0] * image_shape[0]) plt.scatter([r_p_x], [r_p_y], c="red")
Ну, что-то похожее на истину. Загрузим фотографии всех людей:
images_left_conc = [] images_right_conc = [] pupils_left_conc = [] pupils_right_conc = [] patients_path = os.path.join(database_path, "Data", "Original") for patient in os.listdir(patients_path): print(patient) images, points = load_image_data(patient) for i in range(len(images)): signle_image_data = image_to_train_data(images[i], points[i]) if any(stuff is None for stuff in signle_image_data): continue right_image, right_pupil, left_image, left_pupil = signle_image_data if any(right_pupil < 0) or any(left_pupil < 0): continue images_right_conc.append(right_image) images_left_conc.append(left_image) pupils_right_conc.append(right_pupil) pupils_left_conc.append(left_pupil) images_left_conc = np.array(images_left_conc) images_right_conc = np.array(images_right_conc) pupils_left_conc = np.array(pupils_left_conc) pupils_right_conc = np.array(pupils_right_conc)Нормализация изображений:
images_left_conc = images_left_conc / 255 images_right_conc = images_right_conc / 255Теперь хитрый трюк, который не будет работать на косых людях: усредним положения левого и правого зрачков и будем предсказывать это усредненное значение:
pupils_conc = np.zeros_like(pupils_left_conc) for i in range(2): pupils_conc[:, i] = (pupils_left_conc[:, i] + pupils_right_conc[:, i]) / 2Посмотрим распределение позиций зрачков:
viz_pupils = np.zeros(image_shape) for y, x in pupils_conc: y = int(y * image_shape[0]) x = int(x * image_shape[1]) viz_pupils[y, x] += 1 max_val = viz_pupils.max() viz_pupils = viz_pupils / max_val plt.imshow(viz_pupils, cmap="hot")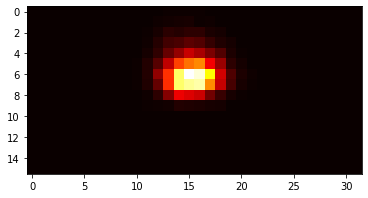
Ага, большая часть данных находится около центра картинки.
# еще несколько вкусных строчек from sklearn.model_selection import train_test_split import torch from torch.utils.data import DataLoader, TensorDataset# функция, разбивающая данные на два датасета -- тренировочный и валидационный def make_2eyes_datasets(images_left, images_right, pupils, train_size=0.8): n, height, width = images_left.shape images_left = images_left.reshape(n, 1, height, width) images_right = images_right.reshape(n, 1, height, width) images_left_train, images_left_val, images_right_train, images_right_val, pupils_train, pupils_val = train_test_split( images_left, images_right, pupils, train_size=train_size ) def make_dataset(im_left, im_right, pups): return TensorDataset( torch.from_numpy(im_left.astype(np.float32)), torch.from_numpy(im_right.astype(np.float32)), torch.from_numpy(pups.astype(np.float32)) ) train_dataset = make_dataset(images_left_train, images_right_train, pupils_train) val_dataset = make_dataset(images_left_val, images_right_val, pupils_val) return train_dataset, val_dataset # преобразование датасетов в даталоадеры def make_dataloaders(train_dataset, val_dataset, batch_size=256): train_dataloader = DataLoader(train_dataset, batch_size=batch_size) val_dataloader = DataLoader(val_dataset, batch_size=batch_size) return train_dataloader, val_dataloaderbatch_size = 256 eyes_datasets = make_2eyes_datasets(images_left_conc, images_right_conc, pupils_conc) eyes_train_loader, eyes_val_loader = make_dataloaders(*eyes_datasets, batch_size=batch_size)import torch import torch.nn as nn import torch.nn.functional as F# модуль, аналогичный `keras.layers.Reshape` class Reshaper(nn.Module): def __init__(self, target_shape): super(Reshaper, self).__init__() self.target_shape = target_shape def forward(self, input): return torch.reshape(input, (-1, *self.target_shape)) # сама нейронка class EyesNet(nn.Module): def __init__(self): super(EyesNet, self).__init__() # два feature-extractor'а с одинаковой архитектурой self.features_left = nn.Sequential( nn.Conv2d(in_channels=1, out_channels=32, kernel_size=5, stride=2, padding=2), nn.LeakyReLU(), nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), Reshaper([64]) ) self.features_right = nn.Sequential( nn.Conv2d(in_channels=1, out_channels=32, kernel_size=5, stride=2, padding=2), nn.LeakyReLU(), nn.Conv2d(in_channels=32, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=2, padding=1), nn.LeakyReLU(), Reshaper([64]) ) self.fc = nn.Sequential( nn.Linear(128, 64), nn.LeakyReLU(), nn.Linear(64, 16), nn.LeakyReLU(), nn.Linear(16, 2), nn.Sigmoid() ) def forward(self, x_left, x_right): # прогоняем две картинки через слои фич, конкатенируем и отдаем регрессору x_left = self.features_left(x_left) x_right = self.features_right(x_right) x = torch.cat((x_left, x_right), 1) x = self.fc(x) return xК слову, тренировать я собираюсь на GPU (потому что любая тренировка на CPU ? смэрть), благо Колаб дает бесплатно использовать 8 гигабайт.
# функция обучения нейронки def train(model, train_loader, test_loader, epochs, lr, folder="gazenet"): os.makedirs(folder, exist_ok=True) optimizer = torch.optim.Adam(model.parameters(), lr=lr) mse = nn.MSELoss() for epoch in range(epochs): running_loss = 0 error_mean = [] error_std = [] for i, (*xs_batch, y_batch) in enumerate(train_loader): xs_batch = [x_batch.cuda() for x_batch in xs_batch] y_batch = y_batch.cuda() optimizer.zero_grad() y_batch_pred = model(*xs_batch) loss = mse(y_batch_pred, y_batch) loss.backward() optimizer.step() running_loss += loss.item() difference = (y_batch - y_batch_pred).detach().cpu().numpy().reshape(-1) error_mean.append(np.mean(difference)) error_std.append(np.std(difference)) error_mean = np.mean(error_mean) error_std = np.mean(error_std) print(f"Epoch {epoch+1}/{epochs}, train loss: {running_loss}, error mean: {error_mean}, error std: {error_std}") running_loss = 0 error_mean = [] error_std = [] for i, (*xs_batch, y_batch) in enumerate(train_loader): xs_batch = [x_batch.cuda() for x_batch in xs_batch] y_batch = y_batch.cuda() y_batch_pred = model(*xs_batch) loss = mse(y_batch_pred, y_batch) loss.backward() running_loss += loss.item() difference = (y_batch - y_batch_pred).detach().cpu().numpy().reshape(-1) error_mean.append(np.mean(difference)) error_std.append(np.std(difference)) error_mean = np.mean(error_mean) error_std = np.mean(error_std) print(f"Epoch {epoch+1}/{epochs}, val loss: {running_loss}, error mean: {error_mean}, error std: {error_std}") epoch_path = os.path.join(folder, f"epoch_{epoch+1}.pth") torch.save(model.state_dict(), epoch_path)eyesnet = EyesNet().cuda() # полученные веса сохраняются в папку *eyes_net* train(eyesnet, eyes_train_loader, eyes_val_loader, 300, 1e-3, "eyes_net")Давайте посмотрим, что получилось после 300 эпох (я не писал сиды, поэтому у вас будут другие значения):
Epoch 1/300, train loss: 0.3125856015831232, error mean: -0.019309822469949722, error std: 0.08668763190507889 Epoch 1/300, val loss: 0.18365296721458435, error mean: -0.008721884340047836, error std: 0.07283741235733032 Epoch 2/300, train loss: 0.1700970521196723, error mean: 0.0001489206333644688, error std: 0.07033108174800873 Epoch 2/300, val loss: 0.1475073655601591, error mean: -0.001808341359719634, error std: 0.06572529673576355 ... Epoch 299/300, train loss: 0.003378463063199888, error mean: -8.133996743708849e-05, error std: 0.009488753043115139 Epoch 299/300, val loss: 0.004163481352406961, error mean: -0.001996406354010105, error std: 0.010547727346420288 Epoch 300/300, train loss: 0.003569353237253381, error mean: -9.1125002654735e-05, error std: 0.00977678969502449 Epoch 300/300, val loss: 0.004456713928448153, error mean: 0.0008482271223329008, error std: 0.010923181660473347299 эпоха мне нравится больше всех, поэтому заюзаем ее для тестов.
Сделаем функцию для визуализации предсказаний:
import random # рисует левый и правый глаз и выставляет реальное и предсказанное положение зрачка def show_output(model, data_loader, batch_num=0, samples=5, grid_shape=(5, 1), figsize=(10, 10)): for i, (*xs, y) in enumerate(data_loader): if i == batch_num: break xs = [x.cuda() for x in xs] y_pred = model(*xs).detach().cpu().numpy().reshape(-1, 2) xs = [x.detach().cpu().numpy().reshape(-1, 16, 32) for x in xs] imgs_conc = np.hstack(xs) y = y.cpu().numpy().reshape(-1, 2) indices = random.sample(range(len(y_pred)), samples) fig, axes = plt.subplots(*grid_shape, figsize=figsize) for i, index in enumerate(indices): row = i // grid_shape[1] column = i % grid_shape[1] axes[row, column].imshow(imgs_conc[index]) axes[row, column].scatter([y_pred[index, 1]*32, y_pred[index, 1]*32], [y_pred[index, 0]*16, (y_pred[index, 0]+1)*16], c="r") axes[row, column].scatter([y[index, 1]*32, y[index, 1]*32], [y[index, 0]*16, (y[index, 0]+1)*16], c="g")# загружаем 299 эпоху eyesnet.load_state_dict(torch.load("eyes_net/epoch_299.pth")) show_output(eyesnet, eyes_val_loader, 103, 16, (4, 4))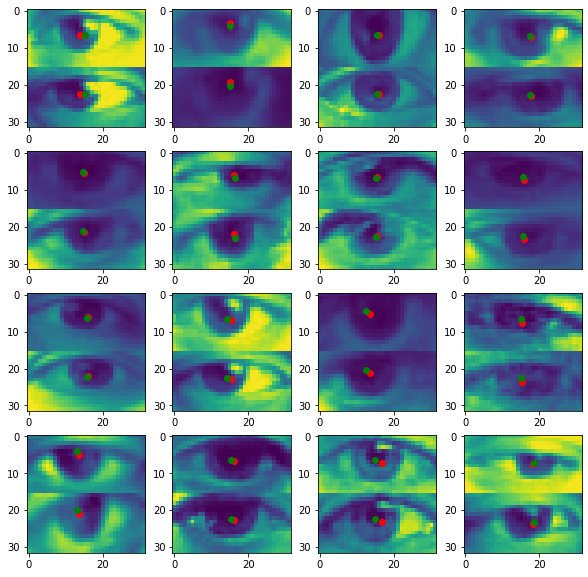
Ох, не нравится мне, что "реальные" точки заметно удалены от центра зрачка, ну да ладно. Закралась погрешность — во-первых, из-за усреднения данных по двум глазам, во-вторых, разметка не совсем точная. Если посмотреть датасет, то можно увидеть некоторые ошибки.
Построим зависимость ошибки от положения зрачка (по X и Y), как в статье:
def error_distribution(model, data_loader, image_shape=(16, 32), bins=32, digits=2, figsize=(10,10)): ys_true = [] ys_pred = [] for *xs, y in data_loader: xs = [x.cuda() for x in xs] y_pred = model(*xs) ys_true.append(y.detach().cpu().numpy()) ys_pred.append(y_pred.detach().cpu().numpy()) ys_true = np.concatenate(ys_true) ys_pred = np.concatenate(ys_pred) indices = np.arange(len(ys_true)) fig, axes = plt.subplots(2, figsize=figsize) for ax_num in range(2): ys_true_subset = ys_true[:, ax_num] ys_pred_subset = ys_pred[:, ax_num] counts, ranges = np.histogram(ys_true_subset, bins=bins) errors = [] labels = [] for i in range(len(counts)): begin, end = ranges[i], ranges[i + 1] range_indices = indices[(ys_true_subset >= begin) & (ys_true_subset <= end)] diffs = np.abs(ys_pred_subset[range_indices] - ys_true_subset[range_indices]) label = (begin + end) / 2 if image_shape: diffs = diffs * image_shape[ax_num] label = label * image_shape[ax_num] else: label = round(label, digits) errors.append(diffs) labels.append(str(label)[:2+digits]) axes[ax_num].boxplot(errors, labels=labels) if image_shape: y_label = "difference, px" x_label = "true position, px" else: y_label = "difference" x_label = "true position" axes[ax_num].set_ylabel(y_label) axes[ax_num].set_xlabel(x_label) if ax_num == 0: title = "Y" else: title = "X" axes[ax_num].set_title(title)error_distribution(eyesnet, eyes_val_loader, figsize=(20, 10))
Ок-с, вроде бы сойдет. Теперь то, ради чего мы все тут собрались. Давайте измерять время С:
import time def measure_time(model, data_loader, n_batches=5): begin_time = time.time() batch_num = 0 n_samples = 0 predicted = [] for *xs, y in data_loader: xs = [x.cpu() for x in xs] y_pred = model(*xs) predicted.append(y_pred.detach().cpu().numpy().reshape(-1)) batch_num += 1 n_samples += len(y) if batch_num >= n_batches: break end_time = time.time() time_per_sample = (end_time - begin_time) / n_samples return time_per_sampleeyesnet_cpu = EyesNet().cpu() eyesnet_cpu.load_state_dict(torch.load("eyes_net/epoch_299.pth", map_location="cpu")) # сделаем dataloader, подающий изображения по одному, чтобы сэмулировать работу в realtime _, eyes_val_loader_single = make_dataloaders(*eyes_datasets, batch_size=1) tps = measure_time(eyesnet_cpu, eyes_val_loader_single) print(f"{tps} seconds per sample") >>> 0.003347921371459961 seconds per sampleМожно посмотреть, как себя будет вести нейронка на основе VGG16 (не обучая, просто прогоним через нее батчи):
import torchvision.models as models class VGG16Based(nn.Module): def __init__(self): super(VGG16Based, self).__init__() self.vgg = models.vgg16(pretrained=False) self.vgg.classifier = nn.Sequential( nn.Linear(25088, 256), nn.LeakyReLU(), nn.Linear(256, 2), nn.Sigmoid() ) def forward(self, x_left, x_right): x_mid = (x_left + x_right) / 2 x = torch.cat((x_left, x_mid, x_right), dim=1) # добавляем паддинг, чтобы VGG16 смогла извлечь фичи x_pad = torch.zeros((x.shape[0], 3, 32, 32)) x_pad[:, :, :16, :] = x x = self.vgg(x_pad) return x vgg16 = VGG16Based() vgg16_tps = measure_time(vgg16, eyes_val_loader_single) print(f"{vgg16_tps} seconds per sample") >>> 0.023713159561157226 seconds per sampleДля сравнения время, измеренное на моем ноутбуке (AMD A10-4600M APU, 1500 MHz):
python benchmark.py 0.003980588912963867 seconds per sample, EyesNet 0.12246298789978027 seconds per sample, VGG16-basedЧто ж, нейронка получилась, время исполнения небольшое, памяти ест немного (веса для VGG16 занимают 80 мб, а для EyesNet — 1 мб; расход оперативки на хранение весов я посмотреть не смог, но можете написать в комментах, как это сделать). Но, как всегда, есть куда расти. Вот небольшой список улучшений, которые пришли мне в голову:
- Сделать нормализацию картинки с помощью матриц трансформации (как в статье).
- Порезать веса. Например, использовать float8 вместо float32 (не уверен, уменьшит ли это время исполнения, но вот памяти будет занимать меньше).
- Использовать PyTorch Mobile — версию PyTorch для мобильных устройств. Также уменьшает объем памяти за счет урезания самой библиотеки.
- Использовать датасет побольше. Как кандидат — GazeCapture. Если вам дадут прямую ссылку на датасет, киньте в комменты, плез — мой запрос проигнорировали: С
- Попробовать TFLite — TensorFlow для мобильных устройств. Может запускаться даже на микроконтроллерах!
Еще раз привет, меня зовут Евгений. Обожаю Data science (и особенно — учить модельки *^*) и занимаюсь им полтора года. Этот пост создан благодаря нашей команде — FARADAY Lab. Мы — начинающие российские стартаперы и хотим делиться с Вами тем, что узнаем сами.