Роботизированная рука справилась с ножницами, яйцами и стаканом воды
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2020-02-27 07:15

Устройство обладает тактильной чувствительностью и способно виртуозно обращаться с предметами, имитируя движения человеческой кисти.
Ученые из Корейского института машин и материалов смогли создать роботизированную руку, способную определять прикосновение и необходимую силу захвата по-разному в разных точках ладони и пальцев. Пресс-релиз о своем изобретении команда опубликовала в онлайн-издании Eurekalert.
Когда мы выполняем самые простые бытовые дела, то даже не задумываемся, насколько филигранную работу выполняют наши руки и как сложна при этом их моторика. Чтобы это осознать, достаточно посмотреть, как тяжело даются первые взаимодействия с любыми бытовыми предметами маленьким детям. Таким образом, чтобы создать хотя бы отчасти способную к аналогичным действиям механическую руку, нужно решить одновременно много задач.
Авторы работы взяли за образец человеческую кисть, сымитировав строение пальцев и структуру их движений. Роборука имеет четыре пальца и 16 суставов, а каждая из частей, способная шевелиться независимо от остальных, приводится в движение 12 двигателями. Это позволяет руке оперировать в условиях небольшого пространства и с большим количеством степеней свободы.
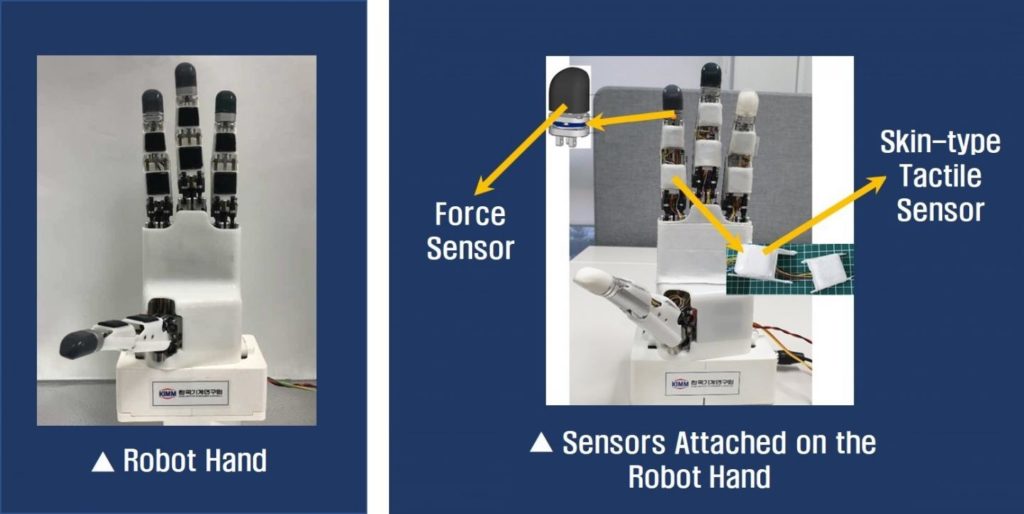
Чтобы рука могла справиться со сложными для манипуляций объектами, она способна ощущать: на «ладони» и кончиках пальцев установлены тактильные датчики двух типов. Одни измеряют величину и направление силы при контакте с объектом и служат основой для управления силой захвата. Вторые — тактильные «кожные» датчики — позволяют механизму оценить распределение силы при контакте. Все вместе помогает распределить захват, чтобы он был достаточно энергичным для удержания яйца в роборуке, но при этом не настолько суровым, чтобы его раздавить.
Такая сложная схема устройства, включающая и тактильные датчики, и модульное управление с помощью приводов, еще не использовалась в существующих коммерческих образцах. Рука может выполнять весьма тонкие манипуляции, включая различные бытовые инструменты — допустим, аккуратно перекладывать куриные яйца или работать с ножницами. По ссылкам, например, можно посмотреть, как механизм играет на клавишных и справляется с функциями хорошего официанта.
Рука может быть установлена на манипулятор любого робота, причем сила ее захвата выше, чем у существующих коммерческих альтернатив, а вес — ниже (менее килограмма против трех). Ученые полагают, что, кроме возможностей непосредственного использования, устройство станет платформой для дальнейшего развития роботов со сложной моторикой и программного обеспечения для их функционирования.
Телеграм: t.me/ainewsline
Источник: naked-science.ru