Авторы этого проекта, начатого в 1996 году — Крэйг Уоррен (Craig Warren) из Нортумбрийского университета и Антонис Джианопулос (Antonis Giannopoulos) из Эдинбургского университета. Пакет был изначально разработан на C, а затем полностью переписан на комбинации Python 3/Cython.
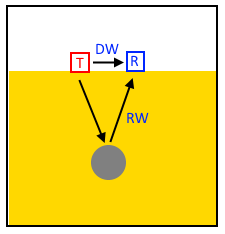
python setup.py build python setup.py installВ качестве «быстрого старта» рассмотрим работу с пакетом на несложном двумерном примере — передающая антенна T импульсного радара (impulse GPR) излучает электромагнитный импульс, часть энергии которого непосредственно достигает приемной антенны R в виде прямой волны (DW — direct wave), а часть проникает сквозь песок, отражается от поверхности проводящего цилиндра и достигает приемной антенны в виде отраженной волны (RW — reflected wave):
Создадим папку models в корневой папке проекта, в которую поместим текстовый файл hello.in, содержащий команды для выполнения моделирования (приводимые далее команды соответствуют актуальной (третьей) версии проекта).
Каждая команда имеет вид:
#команда: параметр_1 параметр_2 параметр_3 ...На одной строке можно записать только одну команду, причем первым символом строки, содержащей команду, должен быть #.
Команды можно сопровождать комментариями:
##комментарийПорядок команд важен для команд конструирования объектов — такие команды выполняются в порядке их следования во входном файле.
Форма импульса
Излучаемый георадаром электромагнитный импульс длится единицы-доли наносекунд, причем чаще всего применяются три формы импульса:
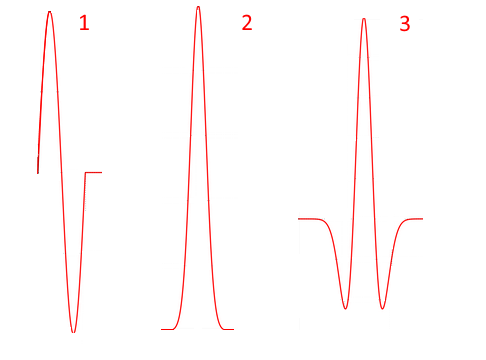
- один период синусоиды (sine)
- гауссов импульс (gaussian)
- «мексиканская шляпа» -«mexican hat» (ricker) — пропорционален второй производной гауссовой функции, форма кривой такого импульса напоминает сомбреро (эта форма импульса была использована американским геофизиком Норманом Рикером (Norman Ricker) в 1953 году при изучении сейсмических сигналов)
Выбираем для нашего примера гауссов импульс (тип импульса — gaussian) с центральной частотой , задаваемый командой:
#waveform: gaussian 1 1e9 pulse(1 — условная амплитуда импульса, pulse — метка импульса)
В этом случае импульс, используемый при моделировании, описывается выражением:
Модель среды и система координат
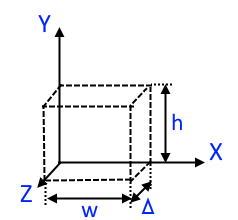
При 2D-моделировании исследуемая область разбивается на ячейки заданного размера, а система координат модели выглядит так — оси X и Y образуют расчетную плоскость (шириной и высотой ), протяженность модели по оси Z имеет величину, равную шагу дискретизации .
Для определения длины волны требуется знать максимальную учитываемую частоту в спектре излучаемого сигнала и скорость волны в рассматриваемой среде.
Скорость распространения электромагнитной волны в среде с относительной диэлектрической проницаемостью , выраженная в сантиметрах в наносекунду — принятая в радиолокации единица скорости, определяется выражением:
Длина волны в сантиметрах при этом определяется выражением:
( — частота в ГГц).
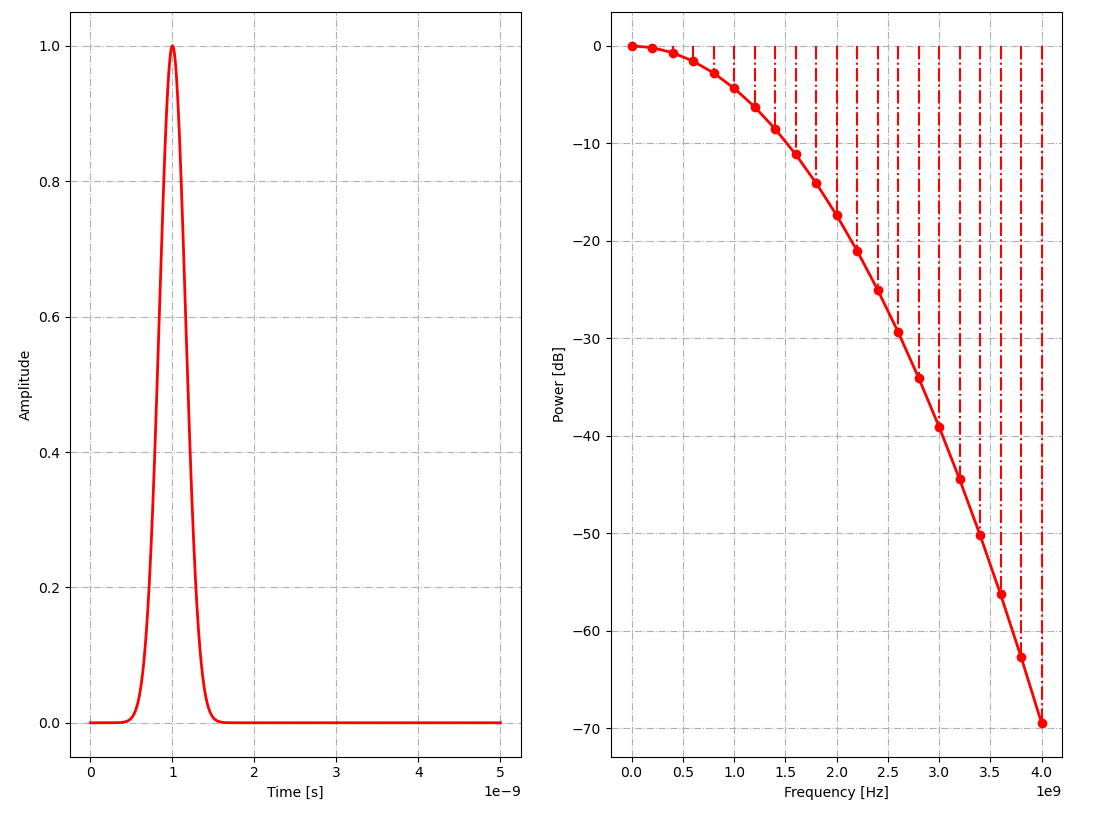
Для вывода формы гауссова импульса и его спектра можно использовать команду:
python -m tools.plot_source_wave gaussian 1 1e9 5e-9 1e-12 -fft(gaussian — тип импульса, 1 — амплитуда импульса, 1e9 — центральная частота (1 ГГц), 5e-9 — длительность отображения импульса (5 нс), 1e-12 — шаг по времени (1 пс))
В рассматриваемом примере средой, в которой находится зондируемый объект, выберем сухой песок с относительной диэлектрической проницаемостью .
Найдем скорость распространения электромагнитной волны в песке:
Определим длину волны в песке:
Исходя из этого, выбираем шаг, одинаковый для всех осей () и равный 2 мм = 0,002 м из соображений удобства (в 1 см укладывается целое число шагов):
#dx_dy_dz: 0.002 0.002 0.002Ограничим моделируемую область прямоугольником шириной , равной 80 см = 0,8 м, и высотой , равной 60 см = 0,6 м:
#domain: 0.60 0.60 0.002(для двумерной модели требуется указать толщину, равную одному шагу (0.002))
Размер области моделирования и величина пространственного шага определяют число ячеек модели и, соответственно, требования к памяти компьютера.
Опишем песок с удельной проводимостью и относительной диэлектрической проницаемостью командой:
#material: 3 0.01 1 0 sand(1 соответствует относительной магнитной проницаемости , равной единице (магнитные свойства отсутствуют), 0 — отсутствию магнитных потерь, а sand — метка этого материала).
Заполним песком большую часть моделируемой области (от y = 0 до y = 38 см = 0,38 м):
#box: 0 0 0 0.80 0.38 0.002 sand(0 0 0 — координаты левого нижнего угла, 0.80 0.38 0.002 — координаты правого верхнего угла (0.002 — шаг дискретизации))
Оставшаяся часть является свободным пространством (метка free_space), по свойствам практически эквивалентным воздуху (, , ).
Границы области моделирования представляются как идеально поглощающий электромагнитное излучение материал (Absorbing Boundary Condition, ABC).
В качестве мишени выберем цилиндр из идеального проводника (полностью отражающий электромагнитное излучение) радиусом 6 см = 0,06 м с центром, расположенным в точке с координатами x = 25 см = 0,25 м и y = 10 см = 0,1 м:
#cylinder: 0.250 0.1 0 0.250 0.1 0.002 0.06 pec(pec — идеально проводящий материал)
Антенны
Моделируемый георадар оснащен двумя антеннами — передающей и приемной.
В нашем учебном примере представим передающую антенну диполем Герца, длина которого равна шагу дискретизации (в трехмерном случае возможен выбор антенны из обширной библиотеки), лежащим на песке (работа в контакте с зондируемой средой) на расстоянии 5 см слева от середины области (x = 35 см = 0,35 м, y = 38 см = 0,38 м):
#hertzian_dipole: z 0.35 0.380 0.0 pulse(z — ось поляризации диполя (для двумерного случая (2D TMz-режим) допустима только z), pulse — метка формы импульса, излучаемого антенной)
Приемная антенна располагается обычно на небольшом неизменном удалении от приемной, которое называется базой антенного блока (такой вариант взаимного расположения антенн называется «common-offset»). В качестве базы выбираем расстояние 10 см, таким образом, горизонтальная координата равна 35 + 10 = 45 см = 0,45 м (5 см справа от середины области):
#rx: 0.45 0.38 0.0Интервал моделирования
Выбор временного окна для моделирования определяется так, чтобы отраженный от мишени сигнал успел достичь приемной антенны.
Определим примерное время, требуемое сигналу в рассматриваемом случае, приняв расстояние от антенн до мишени :
Учитывая, что вершина гауссова импульса радара с центральной частотой 1 ГГц сдвинута относительно начала оси времени на 1 нс, выбираем временное окно 5 наносекунд:
#time_window: 5e-9Моделирование
Таким образом, содержание входного файл таково:
hello.in
#domain: 0.80 0.60 0.002 #dx_dy_dz: 0.002 0.002 0.002 #time_window: 5e-9 #material: 3 0.01 1 0 sand #waveform: gaussian 1 1e9 pulse #hertzian_dipole: z 0.35 0.380 0.0 pulse #rx: 0.45 0.38 0.0 #box: 0 0 0 0.80 0.38 0.002 sand #cylinder: 0.40 0.1 0 0.40 0.1 0.002 0.06 pecpython -m gprMax modelshello.inДля выполнения моделирования используется метод конечных разностей во временной области (FDTD, finite-difference time-domain) (базовый алгоритм метода был предложен Кэйном Йи (Kane Yee)), в честь которого ячейки, на которые разбивается модель, названы ячейки Йи (Yee). Численное решение получается во временной области путем решения уравнений Максвелла для каждой ячейки.
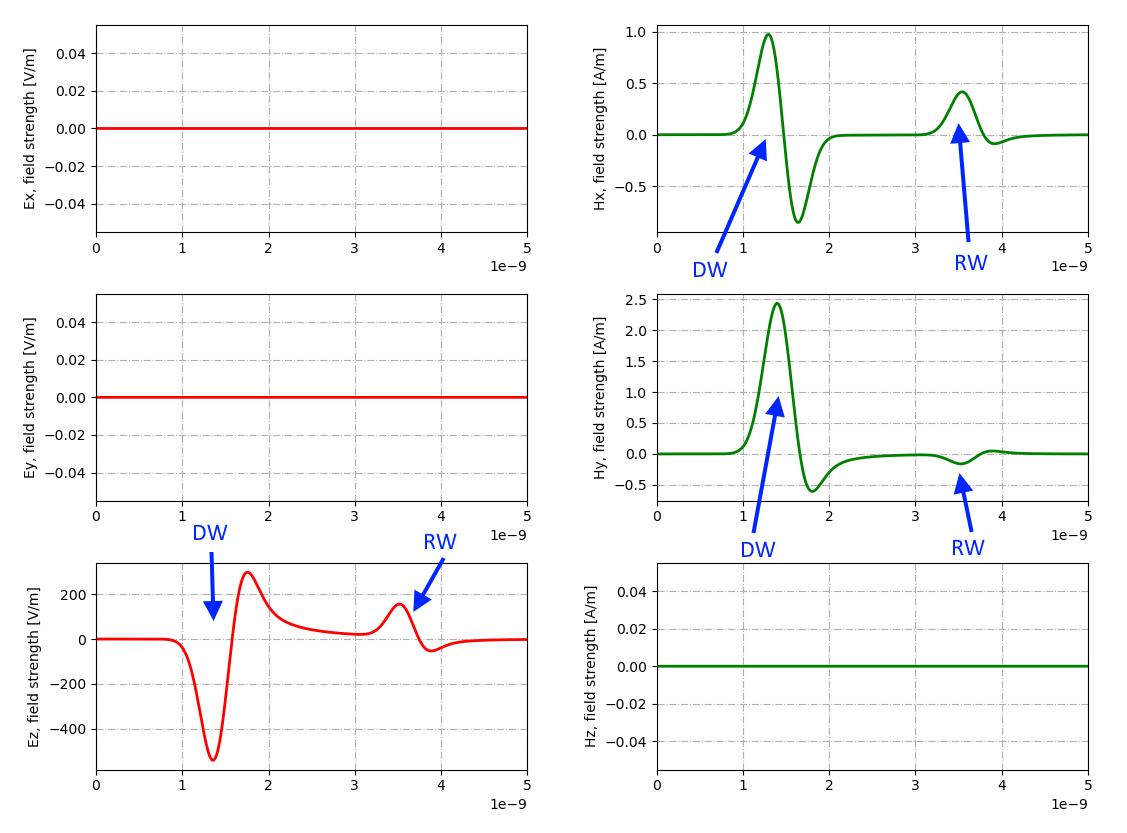
В двумерном случае (2D TMz-режим) рассчитываются только компонента электрического поля и компоненты и магнитного поля.
При превышении объема доступной памяти выдается сообщение о нехватке памяти для выполнения моделирования:


Для визуального представления результатов построим трассы:
python -m tools.plot_Ascan modelshello.outКаждая представленная в открывшемся окне трасса (A-scan) отображает временной график одной из составляющих электромагнитного поля в точке расположения приемной антенны:
А что будет, если поставить во входном файле команду cylinder перед командой box?

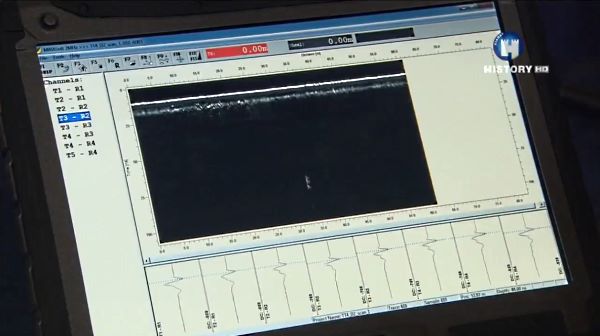
Но более информативным является радарограмма (radargram) — профиль (B-scan), который является сочетанием множества трасс, построенных при перемещении георадара вдоль заданного направления — это и есть та самая процедура перемещения тележки с радаром по исследуемому участку.
Изменим описание антенн, сместив их к началу горизонтальной оси:
#hertzian_dipole: z 0.10 0.38 0.0 pulse #rx: 0.20 0.38 0.0 Зададим шаг перемещения антенн, равный 1 см = 0,01 м:
#src_steps: 0.01 0 0 #rx_steps: 0.01 0 0 Таким образом, содержание входного файл таково:
hello.in
#domain: 0.80 0.60 0.002 #dx_dy_dz: 0.002 0.002 0.002 #time_window: 5e-9 #material: 3 0.01 1 0 sand #waveform: gaussian 1 1e9 pulse #hertzian_dipole: z 0.10 0.38 0.0 pulse #rx: 0.20 0.38 0.0 #src_steps: 0.01 0 0 #rx_steps: 0.01 0 0 #box: 0 0 0 0.80 0.38 0.002 sand #cylinder: 0.40 0.1 0 0.40 0.1 0.002 0.06 pecpython -m gprMax modelshello.in -n 50(50 — число шагов перемещения радара).
После запуска последовательно выполняется моделирование для 50 позиций георадара:

python -m tools.outputfiles_merge models/helloСтроим профиль:
python -m tools.plot_Bscan modelshello_merged.out Ez(Ez — составляющая электромагнитного поля, по которой строим профиль — компонента, непосредственно преобразуемая в напряжение)

красный —
белый —
синий —
Анализируя такие профили, можно делать выводы о глубине, размерах и даже форме мишеней, причем для этого используются и нейронные сети.
Создадим в нижней части модели второй слой песка с диэлектрической проницаемостью :
hello.in
#domain: 0.8 0.6 0.002 #dx_dy_dz: 0.002 0.002 0.002 #time_window: 5e-9 #material: 3 0.01 1 0 sand_1 #material: 9 0.01 1 0 sand_2 #waveform: gaussian 1 1e9 pulse #hertzian_dipole: z 0.10 0.38 0.0 pulse #rx: 0.20 0.38 0.0 #src_steps: 0.01 0 0 #rx_steps: 0.01 0 0 #box: 0 0 0 0.80 0.38 0.002 sand_1 #box: 0 0 0 0.80 0.10 0.002 sand_2