HybridPose: нейросеть распознает позу объекта в 6D
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2020-01-14 16:35

HybridPose — это нейросетевая модель для распознавания позы объекта в 6D. Модель принимает на вход изображение объекта и предсказывает ключевые точки, векторы границ и отношение позы объекта относительно его стандартного положения. Использование промежуточных представлений позы объекта улучшает устойчивость предсказаний модели. Например, это актуально для случая с наложением объектов друг на друга. На датасете Occlusion Linemod нейросеть обошла предыдущий state-of-the-art на 67.4% в точности предсказанных поз.
Стандартные подходы для 6D распознавания позы используют одно представление для кодирования данных позы объекта. HybridPose использует промежуточное представление, в котором хранится информация о геометрии объекта: ключевые точки, векторы границ (edge vectors) и смещение положения объекта от его стандартного положения (symmetry correspondence).
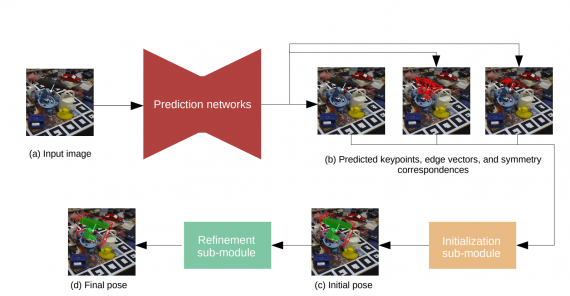
Архитектура нейросети
На вход HybridPose принимает изображение с объектом известного класса, которое было сделано с помощью стенопа с известными параметрами. На выходе модель отдает 6D расположение объекта относительно камеры. HybridPose использует три предсказательные сети чтобы определить:
- Набор ключевых точек объекта (keypoints);
- Набор связей между точками (edges between keypoints);
- Симметрическое соответствие между пикселями изображения (symmetry correspondences)
Оценка работы модели
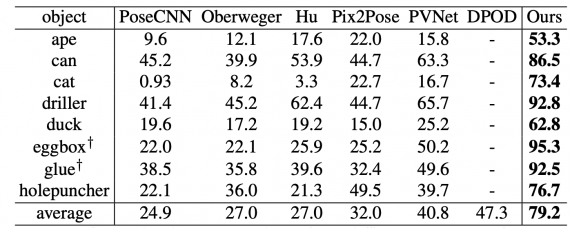
Исследователи протестировали модель на датасете Linemod. В качестве метрики использовали ADD(-S) точность. ADD(-S) точность определяется как процент тестовых примеров, для которых средняя дистанция между предсказанием и истинным значением меньше 10%. HybridPose сравнили с базовыми подходами для оценки 6D позы объекта: PoseCNN, Oberweger et al., Hu et al., PVNet и DPOD. Ниже видно, что на сабсете Linemod HybridPose выдает более точные результаты. Occlusion Linemod — это часть датасета, которая состоит из изображений, на которых объекты перекрывают друг друга.
Телеграм: t.me/ainewsline
Источник: neurohive.io