Среди посетителей крупнейшего форума по робототехнике в России нашлось более 150 инженеров, которые либо уже используют ROS или только планируют его использование в своих проектах. Это неплохой результат для первой встречи небольшого сообщества российских разработчиков ROS. Мы стремимся к тому, чтобы стать частью мирового движения — а за рубежом аналогичные мероприятия собирают уже сотни участников. Второй российский ROS Meetup пройдет уже 30 ноября 2019 года. Спасибо еще раз всем, кто пришел и потратил свое время на детальное изучение докладов и каверзные вопросы. Все это показало, что к развитию ROS есть большой интерес со стороны сообщества и необходимо далее вести регулярную работу для проведения подобных встреч. Мы растем тогда, когда обмениваемся лучшими практиками и улучшаем один из самых распространенных в мире инструментов разработки роботов — Robot Operating System.
Нашими спикерами были разработчики-практики с темами из своего реального опыта. Поэтому материалы, представленные в данной публикации, отражают возможности применения ROS в уже существующих и работающих проектах.
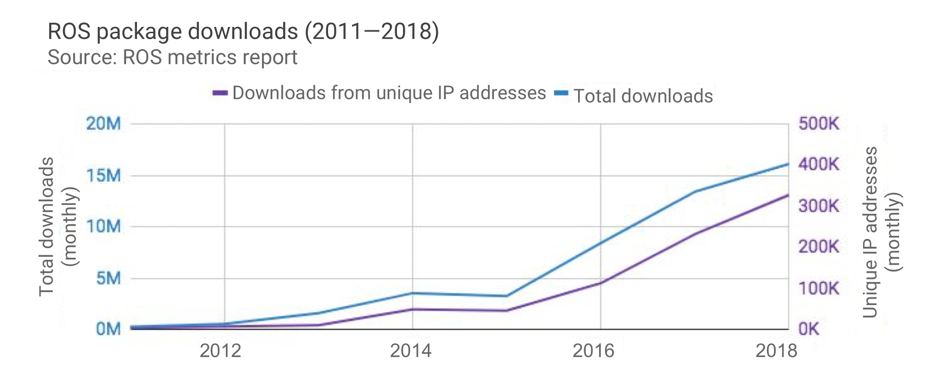
Глобальное сообщество ROS на данный момент является самым большим и открытым робототехническим сообществом в мире. Число загрузок ROS с 2014 года выросло почти 6 раз! Очевидно, что это важнейший инструмент для тех, кто создает роботов, поэтому мы в Лаборатории робототехники Сбербанка поддерживаем всех, кто разделяет с нами ценности ROS и хочет обменяться опытом.
Первый ROS Meetup был насыщен интересными докладами. Но так как не все смогли посетить мероприятие в Москве, мы выкладываем для вас видеозаписи и слайды презентаций:
Введение в ROS. Идеология и текущий статус.
Алексей Бурков, Лаборатория робототехники Сбербанка.
В докладе рассказывается о появлении ROS, его концепциях и людях, которые его разрабатывали, а также текущее состояние фреймворка в мировом сообществе.
Алексей Постников, Лаборатория робототехники Сбербанка.
В докладе рассматривается система локализации робота по Aruco маркерам с использованием ROS.
SLAM и навигация по лазерному лидару.
Алексей Бурков, Лаборатория робототехники Сбербанка.
История о том, как мы использовали ROS для навигации робота-курьера с помощью SLAM’а и планировщика путей, разобраны следующие темы:
- Построение карты помещения и локализация робота алгоритмом Gmapping.
- Локализация робота на карте алгоритмом AMCL.
- Навигация робота через MoveBase и DWA.
Планировщик пути робота с учетом заданной карты и динамических препятствий на примере Eurobot.
Александр Гамаюнов, Лаборатория робототехники Сбербанка.
История создания собственного планировщика пути на основе A*, T*, Costmap Server, Global Planner, STM32 Driver и алгоритма Рамера — Дугласа — Пекера для участия в международных соревнованиях Eurobot.
Тимур Ахтямов, УНМЦ Гидронавтика.
Симуляция подводного аппарата. Использование конечных автоматов SMACH. ROS-обертка serial. Триггер на QR-коды. Roslaunch API для запуска и остановки launch-файлов из Python-кода. Автозапуск нод при старте ОС.
Елизавета Шпиев, VIST Group.
Рассказ о том, как VIST Group использует ROS для создания интеллектуального карьера.
Олег Шипитько, Визиллект.
Рассказ применении Google Test (С++), Unittest (Python) и Rostest для тестирования в ROS.
Александр Сёмочкин, Лаборатория робототехники Сбербанка.
О том, как использовать RGBD-камеру для захвата предметов роботом с манипулятором.
Константин Коногорский, VIST Group.
Продолжение истории об интеллектуальном карьере VIST Group, или как объединить необъединимое.
Александр Сёмочкин, Лаборатория робототехники Сбербанка.
Доклад об использовании Docker для создания и запуска виртуального образа ROS на Linux.
Александр Меньшиков, Лаборатория робототехники Сбербанка.
Использование ROS для создания сервисов голосового общения.
Принять участие в качестве слушателя можно заполнив заявку и дождавшись на почту подтверждения вашего участия.
