A2D2: Audi опубликовали датасет для задачи автономного вождения
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-09-25 11:30

A2D2 — это датасет с размеченными изображениями дорог для обучения моделей автономному вождению. Данные собирали Audi. Сам датасет содержит в себе семантическую сегментацию изображений дорог, разметку облака точек. Для части кадров есть разметка 3D границ объектов. Помимо размеченных данных, в A2D2 содержится сабсет неразмеченных данных с сенсоров (390 тысяч кадров).
Подробнее про датасет
Данные включают в себя 40 тысяч размеченных кадров с семантической сегментацией и классами для облака точек. Для 12 тысяч кадров есть разметка 3D границ объектов. Данные были собраны в трех разных городах. В каких именно — не указывается.
Семантическая сегментация
В A2D2 41,280 кадров содержат семантическую сегментацию на 38 классов. Каждый пиксель изображения имеет класс. Классы включают в себя “пешеход”, “машина”, “зелень” и подобное.
Сегментация облака точек
Сегментация облака точек производится с помощью объединения информации о семантической сегментации пикселей и данных с LiDAR. Каждой точке в 3D пространстве присваивается ярлык класса объекта.
3D границы объектов
3D границы объектов предоставляются для 12,499 кадров. LiDAR точки в рамках поля зрения передней камеры размечены 3D границами объектов. Разработчики разметили 14 классов, которые относятся к вождению.
Тьюториал
Помимо датасета, разработчики опубликовали тьюториал по работе с датасетом. Тьюториал покрывает темы обработки конфигов сенсоров, точек из LiDAR, изображений камер и 3D границ объектов. Ссылка на тьюториал.
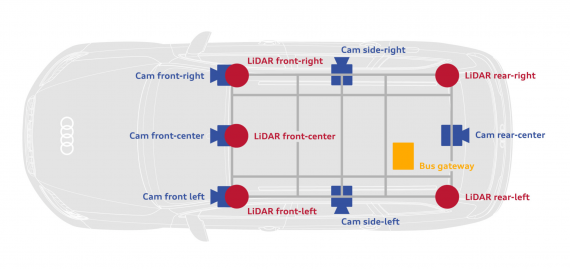
Технические детали сбора данных
Набор сенсоров состоял из 6 камер, 5 LiDAR сенсоров. Это позволило получать картинку в 360° с камер и сенсоров.
Телеграм: t.me/ainewsline
Источник: neurohive.io