Как я учил змейку играть в себя с помощью Q-Network
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-08-30 10:02
Однажды, исследуя глубины интернета, я наткнулся на видео, где человек обучает змейку с помощью генетического алгоритма. И мне захотелось так же. Но просто взять все то же самое и написать на python было бы не интересно. И я решил использовать более современный подход для обучения агентных систем, а именно Q-network. Но начнем с начала.
Обучение с подкреплением
В машинном обучении RL(Reinforcement Learning) достаточно сильно отличается от других направлений. Отличие состоит в том, что классический ML алгоритм обучается уже на готовых данных, в то время как RL, так сказать, сам создает себе эти данные. Идея RL состоит в том, что помимо самого алгоритма, который называют агентом, существует среда(environment), в которую этот агент и помещается. На каждом этапе агент должен совершать какое-то действие(action), а среда отвечает на это наградой(reward) и своим состоянием(state), на основе которого агент и совершает действие.
DQN
Здесь должно быть объяснение того, как алгоритм работает, но я оставлю ссылку на то, где это объясняют умные люди.
Реализация змейки
После того, как мы разобрались c rl, надо создать среду, в которую будем помещать агента. К счастью, изобретать велосипед не требуется, тк такая компания как open-ai уже написала библиотеку gym, с помощью которой можно писать свои энвайронменты. В библиотеке их уже имеется в большом количестве. От простых atari игр до сложных 3d моделей. Но среди всего этого нет змейки. Поэтому приступим к ее созданию.
Я не буду описывать все моменты создания энвайронмента в gym, а покажу только основной класс, в котором требуется реализовать несколько функций.
import gym class Env(gym.Env): def __init__(self): pass def step(self, action): """Функции подается выбранное агентом действие. Возвращает состояние после действия, награду и информацию об окончании эпизода""" def reset(self): """Сбрасывает среду к стартовому состоянию и возвращает стартовое состояние""" def render(self, mode='human'): """Рендерит среду"""Но для реализации этих функций надо придумать систему наград и в каком виде мы будем отдавать информацию о среде.
Состояние
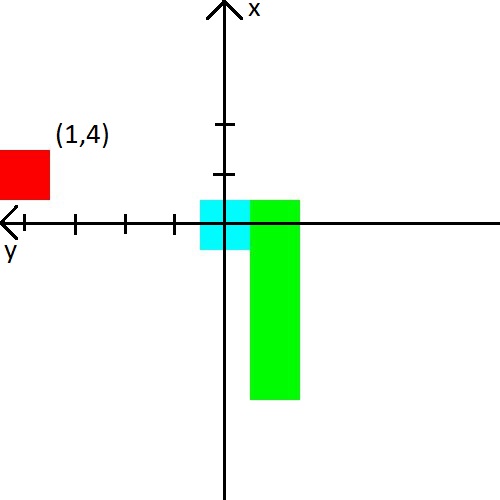
В видео человек подавал змейке расстояние до стены, змейки и яблока в 8 направлениях. Те 24 числа. Я же решил уменьшить количество данных, но немного усложнить их. Во первых, я совмещу расстояние до стен с расстоянием до змейки. Проще говоря будем говорить ей расстояние до ближайшего объекта, который может убить при столкновении. Во вторых, направлений будет всего 3 и они будут зависеть от направления движения змейки. Например при старте змейка смотрит вверх, значит мы сообщим ей расстояние до верхней, левой и правой стенки. Но когда голова змейки повернется направо, то мы уже будем сообщать расстояние до правой, верхней и нижней стенки. Для пущей простоты приведу картинку.

С яблоком я тоже решил поиграться. Информацию о нем мы будем представлять в виде (x,y) координаты в системе координат, которая берет начало у головы змейки. Система координат также будет менять свою ориентацию за головой змейки. После картинки, думаю, точно должно стать понятно.
Награда
Если с состоянием можно придумать какие-то фичи и понадеяться, что нейросеть разберется, то с наградой все сложнее. От нее зависит будет ли агент учиться и будет ли он учиться тому, чего мы хотим.
Я сразу приведу систему награды, с которой я добился стабильного обучения.
- При каждом шаге награда равна -0.25.
- При смерти -10.
- При смерти до 15 шагов -100.
- При съедании яблока sqrt(количество съеденных яблок) * 3.5.
А так же приведу примеры к чему приводит плохая система наград.
- Если давать не достаточно маленькую награду за смерть в первые несколько шагов, то змейка предпочтет убиваться об стенку. Ведь так проще, чем искать яблоки :)
- Если давать положительную награду за шаги, то змейка начнет бесконечно крутиться. Потому что по ее мнению это будет выгоднее, чем искать яблоки.
- И множество других случаев, когда змейка просто не будет учиться.

Итог
Основным интересом при написании змейки было увидеть, как змейка обучится зная так мало о своей среде. И обучилась она неплохо, тк средний показатель съеденных яблок достиг 23, что, мне кажется, очень не дурно. Поэтому эксперимент можно считать удачным.
Телеграм: t.me/ainewsline
Источник: habr.com