NVIDIA Jetson Nano: тесты и первые впечатления
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-07-23 14:54
Hardware
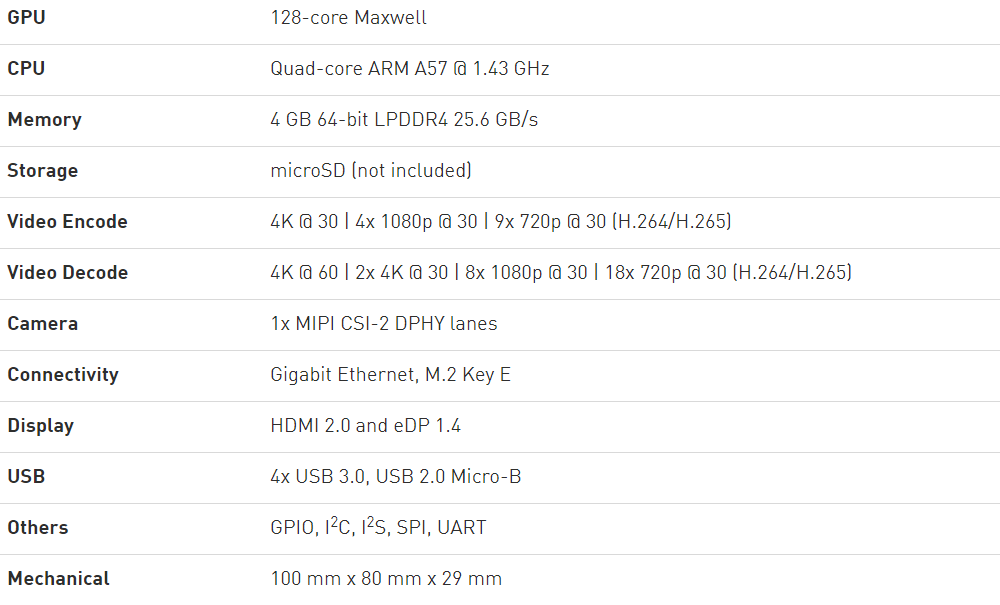
Для начала, технические характеристики с сайта NVIDIA:
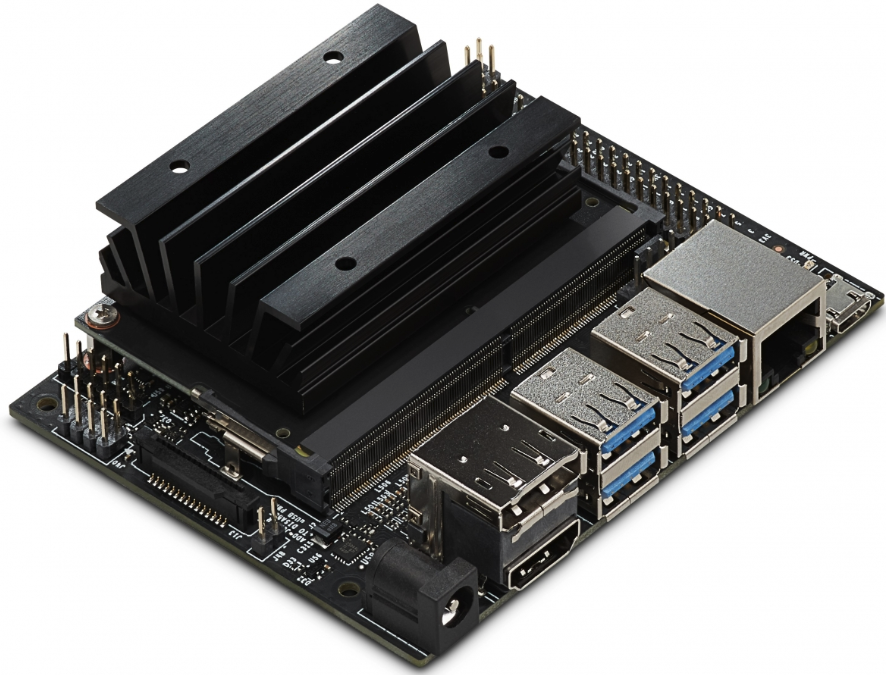
Второе — это совместимость с Raspberry Pi. Плата имеет 40-пиновый разъем с различными интерфейсами (I2C, SPI и пр), также имеется разъем камеры, который тоже совместим с Raspberry Pi. Можно предположить, что большое количество уже имеющихся аксессуаров (экраны, платы управления моторами и пр) будут работать (возможно, придется использовать удлиннительный кабель, т.к. Jetson Nano все же отличается по габаритам).
Третье — на плате имеется 2 видеовыхода, Gigabit-Ethernet и USB 3.0, т.е. Jetson Nano в целом даже чуть более функциональна чем «прообраз». Питание 5В, может браться как по Micro USB, так и через отдельный разъем, который рекомендуется для
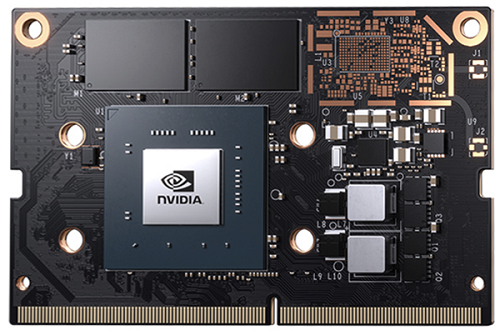
Если присмотреться внимательно, то можно увидеть, что конструктивно устройство состоит из двух модулей — собственно модуля Jetson Nano, и нижней платы с коннекторами, соединение осуществляется через разъем.
Software
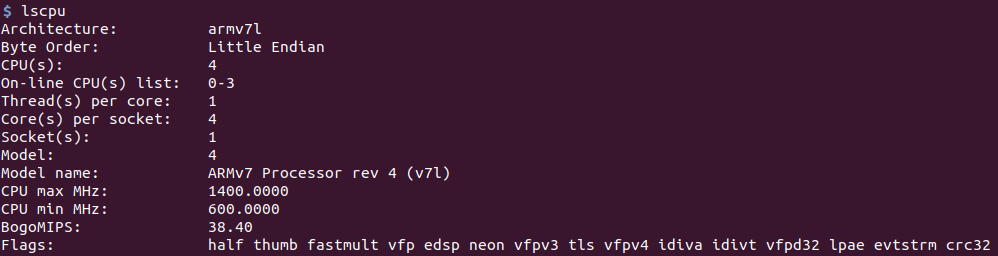
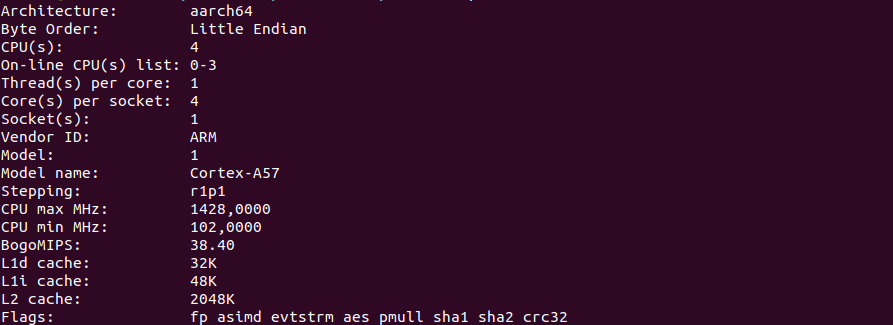
Как упоминалось выше, загрузка и установка мало отличается от Raspberry Pi. Загружаем образ на SD-карту через Etcher или Win32DiskImager, попадаем в Linux, ставим необходимые библиотеки. Отличное по подробности пошаговое руководство есть здесь, я пользовался им. Перейдем сразу к тестам — попробуем запустить разные программы под Nano, и посмотрим как они работают. Для сравнения я использовал три компьютера — свой рабочий ноутбук (Core I7-6500U 2.5ГГц), Raspberry Pi 3B+ и Jetson Nano. Тест CPU
Для начала, скриншот команды lscpu.
Raspberry Pi 3B+:
Исходный код под спойлером
import time # Source: https://stackoverflow.com/questions/9004789/1000-digits-of-pi-in-python def make_pi(): q, r, t, k, m, x = 1, 0, 1, 1, 3, 3 for j in range(10000): if 4 * q + r - t < m * t: yield m q, r, t, k, m, x = 10*q, 10*(r-m*t), t, k, (10*(3*q+r))//t - 10*m, x else: q, r, t, k, m, x = q*k, (2*q+r)*x, t*x, k+1, (q*(7*k+2)+r*x)//(t*x), x+2 t1 = time.time() pi_array = [] for i in make_pi(): pi_array.append(str(i)) pi_array = pi_array[:1] + ['.'] + pi_array[1:] pi_array_str = "".join(pi_array) print("PI:", pi_array_str) print("dT:", time.time() - t1)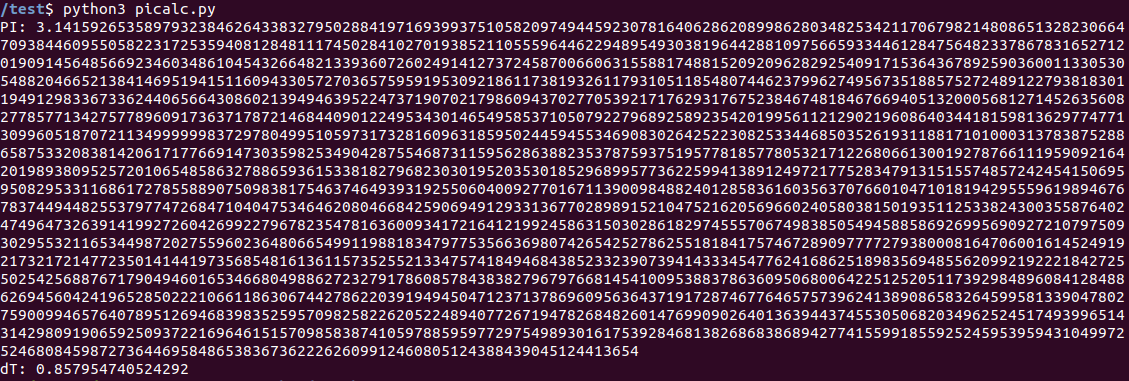
PyCUDA
Перейдем к более интересному, расчетам с помощью GPU, для чего разумеется (плата ведь от NVIDIA), будем использовать CUDA. Библиотека PyCUDA потребовала некоторого шаманства при установке, она не находила cuda.h, помогло использование команды «sudo env „PATH=$PATH“ pip install pycuda», возможно есть другой способ (еще варианты обсуждались на форуме devtalk.nvidia.com). Для теста я взял несложную программу SimpleSpeedTest для PyCUDA, которая просто в цикле считает синусы, ничего полезного такой тест не делает, но время оценить им вполне можно, и его код простой и понятный.
Исходный код под спойлером
# SimpleSpeedTest.py # https://wiki.tiker.net/PyCuda/Examples/SimpleSpeedTest import pycuda.driver as drv import pycuda.autoinit from pycuda.compiler import SourceModule import numpy import time blocks = 64 block_size = 128 nbr_values = blocks * block_size n_iter = 100000 print("Calculating %d iterations" % (n_iter)) print() ##################### # SourceModule SECTION # create two timers so we can speed-test each approach start = drv.Event() end = drv.Event() mod = SourceModule("""__global__ void gpusin(float *dest, float *a, int n_iter) { const int i = blockDim.x*blockIdx.x + threadIdx.x; for(int n = 0; n < n_iter; n++) { a[i] = sin(a[i]); } dest[i] = a[i]; }""") gpusin = mod.get_function("gpusin") # create an array of 1s a = numpy.ones(nbr_values).astype(numpy.float32) # create a destination array that will receive the result dest = numpy.zeros_like(a) start.record() # start timing gpusin(drv.Out(dest), drv.In(a), numpy.int32(n_iter), grid=(blocks,1), block=(block_size,1,1) ) end.record() # end timing # calculate the run length end.synchronize() secs = start.time_till(end)*1e-3 print("PyCUDA time and first three results:") print("%fs, %s" % (secs, str(dest[:3]))) print() ############# # CPU SECTION # use numpy the calculate the result on the CPU for reference a = numpy.ones(nbr_values).astype(numpy.float32) t1 = time.time() for i in range(n_iter): a = numpy.sin(a) print("CPU time and first three results:") print("%fs, %s" % (time.time() - t1, str(a[:3])))Raspberry Pi 3B+ — 41.85c CPU, GPU — данных нет, CUDA на RPi не работает.
Ноутбук — 0.05с GPU, 3.08c CPU.
Все вполне ожидаемо. Расчеты на GPU гораздо быстрее расчетов на CPU (все же 128 ядер), Raspberry Pi отстает весьма значительно. Ну и разумеется,
Заключение
Как можно видеть, плата у NVIDIA получилась вполне интересной и весьма производительной. Она немного больше по размеру и дороже, чем Raspberry Pi, но если кому-то нужна большая вычислительная мощность при компактном размере, то оно вполне стоит того. Разумеется, нужно это не всегда — чтобы например, отправлять температуру на narodmon, хватит и Raspberry Pi Zero, причем с многократным запасом. Так что Jetson Nano не претендует на замену Raspberry и клонов, но для ресурсоемких задач она весьма интересна (это могут быть не только дроны или мобильные роботы, но и например, камера для дверного звонка с распознаванием лиц). В одну часть все задуманное не уместилось. Во второй части будут тесты AI-части — тесты Keras/Tensorflow и задач по классификации и распознаванию изображений.
Телеграм: t.me/ainewsline
Источник: habr.com