Роботы научились распознавать предметы с помощью взгляда и прикосновений
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-06-17 13:44
Людям довольно легко определить плотность и рельефность предмета, просто взглянув на него. С таким же успехом можно сказать, как выглядит объект, просто касаясь его с закрытыми глазами. Такие умения помогли бы роботам лучше взаимодействовать с предметами но, к сожалению, до сих пор они не были им доступны. Исследователи из Лаборатории искусственного интеллекта МТИ (CSAIL) решили эту проблему, оснастив роботизированную руку KUKA тактильным датчиком GelSight — таким образом, искусственный интеллект смог изучить связь между визуальной и тактильной информацией, и объединить их.

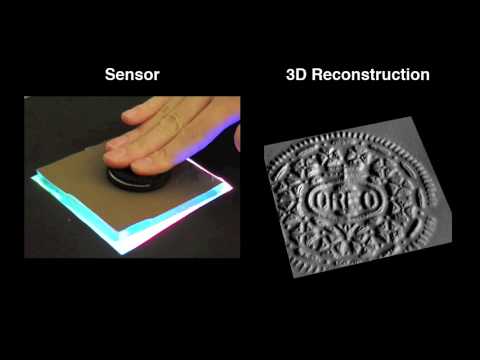
Использованный тактильный датчик GelSight был разработан группой инженеров под руководством Теда Адельсона в 2014 году. По своей сути он является электронной копией кончика человеческого пальца, в котором для создания трехмерной карты поверхности используется камера и чувствительная резиновая пленка. Устройство уже не раз было проверено в реальных условиях — например, однажды он помог роботу правильно подключить USB-кабель к порту.

Искусственный интеллект объединил органы осязания и зрения
В новом проекте датчик был установлен в робота KUKA, и объединен с искусственным интеллектом — таким образом роботизированная рука научилась на глаз определять рельефность предметов, и вслепую распознавать их форму. Для обучения системы использовался набор из 12 000 видеороликов с 200 объектами, такими как ткани, инструменты и бытовые предметы. Видео были разбиты по кадрам, и именно на их основе робот объединял тактильную и визуальную информацию.
На данный момент робот способен выполнять работу только в контролируемой среде, и только с заранее известными ему предметами. Разработчики системы хотят расширить его возможности, дав искусственному интеллекту больше данных для изучения.
Глядя на сцену, наша модель может представить себе ощущение прикосновения к плоской поверхности или к острому краю. Касаясь вслепую, она может определить форму предметов исключительно по тактильным ощущениям. Объединение этих двух чувств может расширить возможности робота и сократить объем данных, которые могут ему понадобиться для выполнения задач, связанных с манипулированием и захватом объектов, — объяснил Юньчжу Ли, аспирант CSAIL.
Роботы постоянно совершенствуются, и на данный момент даже умеют работать в команде. Например, разработанные в Калифорнийском университете в Беркли роботы-тараканы VelociRoACH недавно научились помогать друг другу вставать на ноги. Почитать об этом и посмотреть видео можно в нашем материале.
Если вам интересны новости науки и технологий, обязательно подпишитесь на наш канал в Яндекс.Дзен. Там вы найдете материалы, которые не были опубликованы на сайте!
Телеграм: t.me/ainewsline
Источник: hi-news.ru