Как сверточные нейросети помогают дронам учиться летать
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-06-04 14:00
В Intel с помощью сверточной нейросети обучили дрона летать в динамичной среде. Система тестируется как симулированном пространстве, так и в реальном. Результаты системы превосходят state-of-the-art подход и сравнимы с профессиональным пилотом по успешности, но отстают по скорости в полтора раза.
Одни из актуальных проблем при разработке дронов — динамически изменяющиеся среды, ненадежная оценка состояния и функционирование в режиме ресурсоемких операций. Предложенная система пытается решить эти проблемы. Она комбинирует в себе нейронную сеть с генерацией траекторий и методами контроля. Благодаря своей архитектуре, система способна преодолевать гоночные трассы с движущимися препятствиями на высокой скорости.
Что внутри дрона
В качестве данных для обучения системы были собраны снимки с камеры и характеристики положения и скорости дрона в момент, когда снимки были сделаны. CNN напрямую сопоставляет сырые изображения среды к направлению и скорости. На основе того, что выдает CNN, генерируется траектория минимального рывка. Контроллер дрона получает эту траекторию и направляет дрон согласно ей. Удается достичь того, что система работает в самом дроне, не требует глобальной оценки состояний, независима от типа дрона и местности.
Подход состоит из двух компонентов:
- Система перцепции, которая состоит из и предсказывает целевое направление и скорость по изображению местности;
- Система контроля, которая использует выход системы перцепции, чтобы сгенерировать оптимальную траекторию
Оценка работы системы
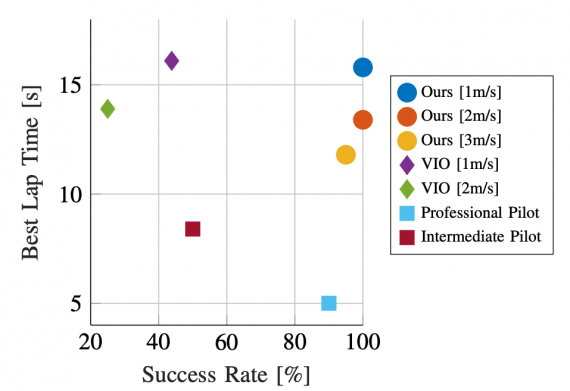
Сначала работа системы проверяется на контролируемом симуляторе. Затем система тестируется в реальной жизни. Исследователи сравнивают работу системы с текущим state-of-the-art подходом (VIO) и с человеком в качестве пилота дрона. Система осуществляет переход от симулированного пространства в реальное без потери в точности.

Результат работы системы сравним по успешности с профессиональным пилотом, но в полтора раза отстает с ним по времени.
Видеодемонстрация полета дронов, обученных на симуляциях:
Телеграм: t.me/ainewsline
Источник: neurohive.io