Реставрируем фотографии с помощью нейросетей
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-05-31 01:08

- находим все дефекты изображения: надломы, потертости, дырки;
- закрашиваем найденные дефекты, основываясь на значениях пикселей вокруг них;
- раскрашиваем изображение.
В этой статье я детально пройдусь по каждому из этапов реставрации и расскажу, как и где мы брали данные, какие сети мы учили, что у нас получилось, на какие грабли мы наступили.
Поиск дефектов
Мы хотим найти все пиксели, относящиеся к дефектам на загруженной фотографии. Для начала нам нужно понять, какие фотографии военных лет будут загружать люди. Мы обратились к организаторам проекта «Бессмертный полк», которые поделились с нами данными. Проанализировав их, мы заметили, что люди зачастую загружают портреты, одиночные или групповые, на которых есть умеренное или большое количество дефектов.
Затем нужно было собрать обучающую выборку. Обучающая выборка для задачи сегментации — это изображение и маска, на которой отмечены все дефекты. Самый простой способ — отдать фотографии в разметку ассесорам. Конечно, люди умеют хорошо находить дефекты, но проблема в том, что разметка — это очень долгий процесс.

- Даже если нам кажется, что дефектов на фотографии очень много, что она очень грязная и сильно потрёпана временем, всё равно площадь, занимаемая дефектами, гораздо меньше неповреждённой части изображения. Чтобы решить эту проблему, можно увеличить вес положительного класса в , и оптимальным весом будет отношение количества всех чистых пикселей к количеству пикселей, принадлежащих к дефектам.
- Вторая проблема в том, что если мы используем Unet из коробки с предобученным энкодером, например Albunet-18, то теряем много позиционной информации. Первый слой Albunet-18 состоит из свертки с ядром 5 и stride равным двум. Это позволяет сети быстро работать. Мы пожертвовали временем работы сети ради лучшей локализации дефектов: убрали max pooling после первого слоя, уменьшили stride до 1 и уменьшили ядро свёртки до 3.
- Если мы будем работать с маленькими изображениями, например, сжимая картинку до 256 х 256 или 512 х 512, то маленькие дефекты будут просто пропадать из-за интерполяции. Поэтому нужно работать с большой картинкой. Сейчас в production мы сегментируем дефекты на фотографии 1024 х 1024. Поэтому необходимо было обучать нейросеть на больших кропах больших изображений. А из-за этого возникают проблемы с маленьким размером батча на одной видеокарте.
- Во время обучения у нас на одну карточку помещается около 20 картинок. Из-за этого оценка среднего и дисперсии в BatchNorm-слоях получается неточной. Решить эту проблему нам помогает In-place BatchNorm, который, во-первых, экономит память, а во-вторых, у него есть версия Synchronized BatchNorm, которая синхронизирует статистики между всеми карточками. Теперь мы считаем среднее и дисперсию не по 20 картинкам на одной карточке, а по 80 картинкам с 4 карточек. Это улучшает сходимость сети.
В конце концов, увеличив вес , поменяв архитектуру и использовав In-place BatchNorm, мы начали искать дефекты на фотографии. Но задёшево можно было сделать ещё чуть лучше, добавив Test Time Augmentation. Мы можем прогнать сеть один раз на входном изображении, потом отзеркалить его и прогнать сеть ещё раз, это может помочь нам найти маленькие дефекты.

Реставрация фрагментов
Решить эту задачу нам снова помог Unet. На вход ему мы подавали исходное изображение и маску, на которой единицами отмечаем чистые пространства, а нолями — те пиксели, которые хотим закрасить. Данные мы собирали следующим образом: брали из интернета большой датасет с картинками, например OpenImagesV4, и искусственно добавляли дефекты, которые похожи по форме на те, что встречаются в реальной жизни. И после этого обучали сеть восстанавливать недостающие части.
Как мы можем модицифировать Unet для этой задачи?
Можно использовать вместо обычной свёртки частичную (Partial Convolution). Её идея в том, что при сворачивании региона картинки с каким-то ядром мы не учитываем значения пикселей, относящихся к дефектам. Это помогает сделать закрашивание точнее. Пример из статьи NVIDIA. На центральной картинке они использовали Unet с обычной свёрткой, а на правой — с Partial Convolution:

Я упоминал, что мы искусственно добавляли дефекты в чистые изображения. При обучении нужно очень внимательно следить за максимальным размером накладываемых дефектов, потому что при очень больших дефектах, которые сеть никогда не видела в процессе обучения, она будет дико фантазировать и давать абсолютно неприменимый результат. Так что, если вам нужно закрашивать большие дефекты, при обучении тоже подавайте большие дефекты.
Вот пример работы алгоритма:

Раскрашивание
Мы сегментировали дефекты и закрасили их, третий шаг — реконструкция цвета. Напомню, что среди фотографий «Бессмертного полка» очень много одиночных или групповых портретов. И мы хотели, чтобы наша сеть хорошо с ними работала. Мы решили сделать свою колоризацию, потому что ни один из известных нам сервисов не раскрашивает портреты быстро и хорошо.


Как собрать baseline
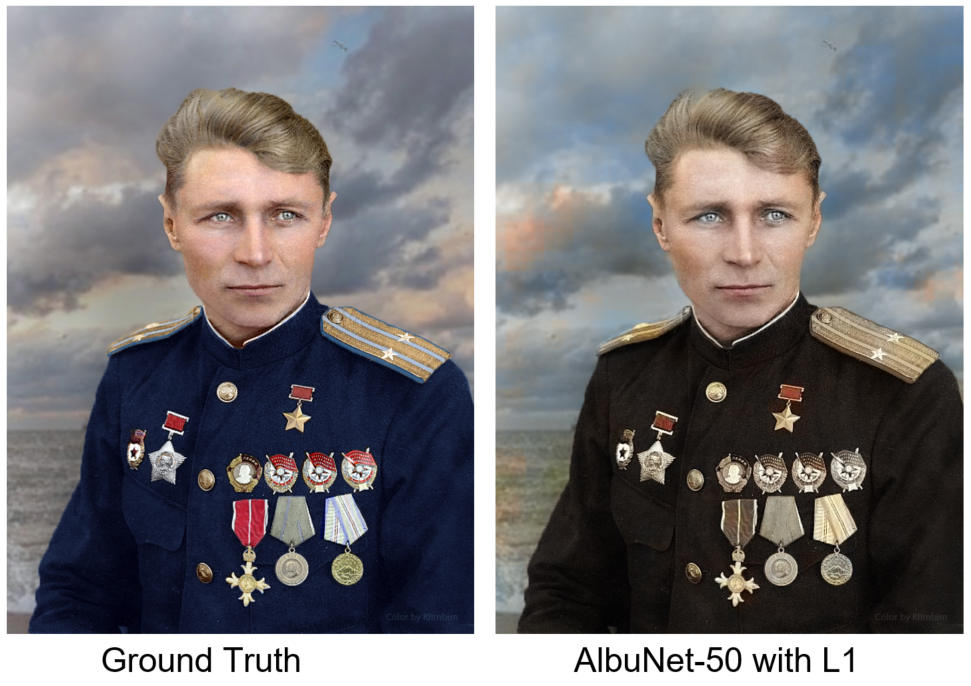
Можно снова взять Unet с предобученным энкодером и минимизировать L1 Loss между настоящим CbCr и прогнозируемым. Мы хотим раскрашивать портреты, поэтому кроме фотографий из OpenImages нам нужно добавить специфические для нашей задачи фотографии.
Где взять цветные фотографии людей в военной форме? В интернете есть люди, которые в качестве хобби или на заказ раскрашивают старые фотографии. Они это делают крайне аккуратно, стараясь полностью соблюсти все нюансы. Раскрашивая форму, погоны, медали они обращаются к архивным материалам, поэтому результату их работы можно доверять. В общей сложности мы использовали 200 фотографий, раскрашенных вручную. Второй полезный источник данных — это сайт Рабоче-Крестьянской Красной Армии. Один из его создателей сфотографировался практически во всех возможных вариантах военной формы времен Великой Отечественной войны.

Как решить эту проблему? Нам нужен дискриминатор: нейронная сеть, которой мы на вход будем подавать изображения, и она будет говорить, насколько реалистично это изображение выглядит. Ниже одна фотография раскрашена вручную, а вторая — нейросетью. Как вы думаете, какая?

Вручную раскрашена левая фотография.


Выводы и заключение
Unet — это классная модель. В первой задаче сегментации мы столкнулись с проблемой при обучении и работе с картинками большого разрешения, поэтому используем In-Place BatchNorm. Во второй задаче (Inpainting) вместо обычной свёртки мы использовали Partial Convolution, это помогло достичь лучших результатов. В задаче колоризации к Unet мы добавили небольшую сеть-дискриминатор, которая штрафовала генератор за нереалистично выглядящее изображение и использовали perceptual loss.
Второй вывод — ассесоры важны. Причем не только на стадии разметки картинок перед обучением, но и для валидации итогового результата, потому что в задачах закрашивания дефектов или колоризации всё равно нужно валидировать результат с помощью человека. Мы отдаем пользователю три фотографии: исходную с удаленными дефектами, колоризованную с удаленными дефектами и просто колоризованную фотографию на случай, если алгоритм поиска и закрашивания дефектов ошибся.
Мы взяли некоторые фотографии проекта «Военный альбом» и обработали их нашими нейросетями. Вот такие результаты получили:

Телеграм: t.me/ainewsline
Источник: habr.com