Перенос стиля
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Разработка ИИГородские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Атаки на ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Внедрение ИИИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Big data
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Работа разума и сознаниеМодель мозгаРобототехника, БПЛАТрансгуманизмОбработка текстаТеория эволюцииДополненная реальностьЖелезоКиберугрозыНаучный мирИТ индустрияРазработка ПОТеория информацииМатематикаЦифровая экономика
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-05-26 15:23
Перенос стиля это процесс преобразования стиля исходного к стилю выбранного изображения и опирается на Сверточный тип сети (CNN), при этом заранее обученной, поэтому многое будет зависеть от выбора данной обученной сети. Благо такие сети есть и выбирать есть из чего, но здесь будет применяться VGG-16.
Для начала необходимо подключить необходимые библиотеки
Где vgg_conv.pth это название файла с весами сети.
При этом необходимо отключить обучение параметров у сети иначе можно испортить загруженные веса, которые не один день обучались.
После объявляются функции преобразования входных изображений, чтобы привести их к виду изображений, на которых обучалась сети VGG-16
Матрица Грама служит для устранения пространственной привязки деталей стиля.
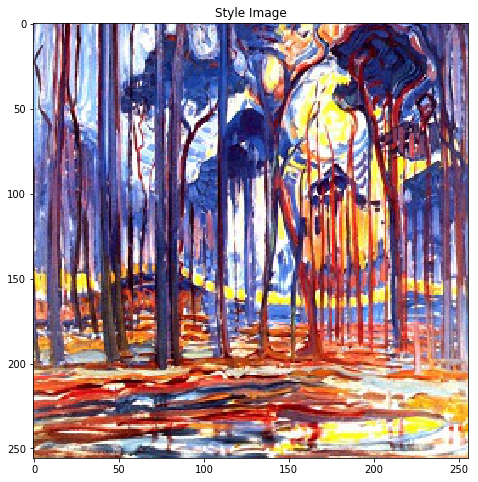
Затем идет процесс загрузки и преобразования исходного и стилевого изображений
Где style_img и content_img это входные изображения, которые преобразуются в тензоры и переносятся по возможности на видеокарту, а в opt_img будет содержаться результат переноса стиля, при этом в качестве начального берется исходное изображение.
Далее идет процесс выбора слоев, задания весов и инициализаций функций потерь
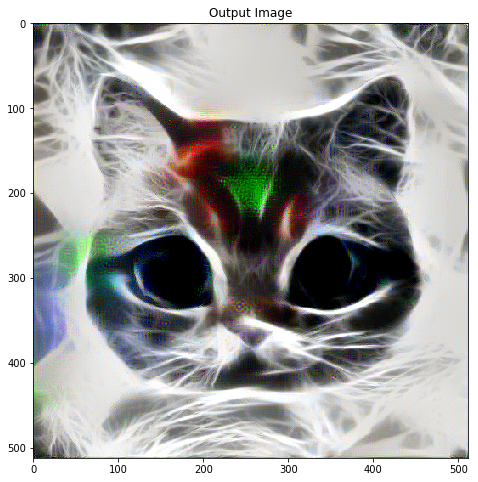
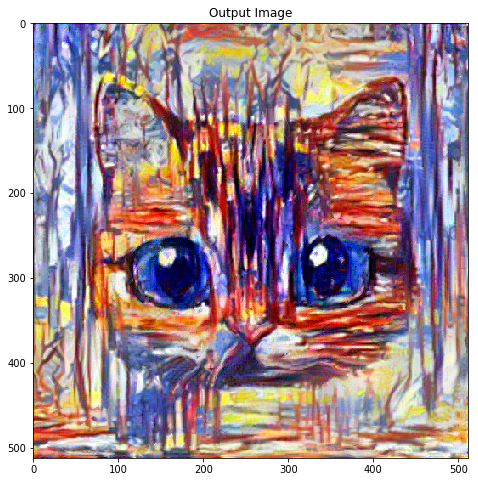
В заключении можно добавить несколько примеров:


Для начала необходимо подключить необходимые библиотеки
Код объявления библиотек
Затем необходимо объявить класс предварительно обученной сети VGG-16 import time import torch from torch.autograd import Variable import torch.nn as nn import torch.nn.functional as F from torch import optim import torchvision from torchvision import transforms from io import BytesIO from PIL import Image from collections import OrderedDict from google.colab import files Код класса VGG-16
Далее необходимо скачать и загрузить веса VGG-16, предварительно перенеся ее на видеокарту, если есть такая возможность class VGG16(nn.Module): def __init__(self, pool='max'): super(VGG, self).__init__() self.conv1_1 = nn.Conv2d(3, 64, kernel_size=3, padding=1) self.conv1_2 = nn.Conv2d(64, 64, kernel_size=3, padding=1) self.conv2_1 = nn.Conv2d(64, 128, kernel_size=3, padding=1) self.conv2_2 = nn.Conv2d(128, 128, kernel_size=3, padding=1) self.conv3_1 = nn.Conv2d(128, 256, kernel_size=3, padding=1) self.conv3_2 = nn.Conv2d(256, 256, kernel_size=3, padding=1) self.conv3_3 = nn.Conv2d(256, 256, kernel_size=3, padding=1) self.conv3_4 = nn.Conv2d(256, 256, kernel_size=3, padding=1) self.conv4_1 = nn.Conv2d(256, 512, kernel_size=3, padding=1) self.conv4_2 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv4_3 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv4_4 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_1 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_2 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_3 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_4 = nn.Conv2d(512, 512, kernel_size=3, padding=1) if pool == 'max': self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool3 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool5 = nn.MaxPool2d(kernel_size=2, stride=2) elif pool == 'avg': self.pool1 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool2 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool3 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool4 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool5 = nn.AvgPool2d(kernel_size=2, stride=2) def forward(self, x, layers): out = {} out['relu1_1'] = F.relu(self.conv1_1(x)) out['relu1_2'] = F.relu(self.conv1_2(out['relu1_1'])) out['pool1'] = self.pool1(out['relu1_2']) out['relu2_1'] = F.relu(self.conv2_1(out['pool1'])) out['relu2_2'] = F.relu(self.conv2_2(out['relu2_1'])) out['pool2'] = self.pool2(out['relu2_2']) out['relu3_1'] = F.relu(self.conv3_1(out['pool2'])) out['relu3_2'] = F.relu(self.conv3_2(out['relu3_1'])) out['relu3_3'] = F.relu(self.conv3_3(out['relu3_2'])) out['relu3_4'] = F.relu(self.conv3_4(out['relu3_3'])) out['pool3'] = self.pool3(out['relu3_4']) out['relu4_1'] = F.relu(self.conv4_1(out['pool3'])) out['relu4_2'] = F.relu(self.conv4_2(out['relu4_1'])) out['relu4_3'] = F.relu(self.conv4_3(out['relu4_2'])) out['relu4_4'] = F.relu(self.conv4_4(out['relu4_3'])) out['pool4'] = self.pool4(out['relu4_4']) out['relu5_1'] = F.relu(self.conv5_1(out['pool4'])) out['relu5_2'] = F.relu(self.conv5_2(out['relu5_1'])) out['relu5_3'] = F.relu(self.conv5_3(out['relu5_2'])) out['relu5_4'] = F.relu(self.conv5_4(out['relu5_3'])) out['pool5'] = self.pool5(out['relu5_4']) return [out[key] for key in layers] vgg = VGG16() vgg.load_state_dict(torch.load('vgg_conv.pth')) for param in vgg.parameters(): param.requires_grad = False if torch.cuda.is_available(): vgg.cuda() Где vgg_conv.pth это название файла с весами сети.
При этом необходимо отключить обучение параметров у сети иначе можно испортить загруженные веса, которые не один день обучались.
После объявляются функции преобразования входных изображений, чтобы привести их к виду изображений, на которых обучалась сети VGG-16
Код функций преобразования входных изображений
to_mean_tensor — прямое преобразование
normalize_image — обратное преобразование
Далее объявляются классы матрицы Грама и функции потерь для матрицы Грама SIZE_IMAGE = 512 to_mean_tensor = transforms.Compose([transforms.Resize(SIZE_IMAGE), transforms.ToTensor(), transforms.Lambda(lambda x: x[torch.LongTensor([2,1,0])]), transforms.Normalize(mean=[0.40760392, 0.45795686, 0.48501961], std=[1,1,1]), transforms.Lambda(lambda x: x.mul_(255)), ]) to_unmean_tensor = transforms.Compose([transforms.Lambda(lambda x: x.div_(255)), transforms.Normalize(mean=[-0.40760392, -0.45795686, -0.48501961], std=[1,1,1]), transforms.Lambda(lambda x: x[torch.LongTensor([2,1,0])]), ]) to_image = transforms.Compose([transforms.ToPILImage()]) normalize_image = lambda t: to_image(torch.clamp(to_unmean_tensor(t), min=0, max=1)) to_mean_tensor — прямое преобразование
normalize_image — обратное преобразование
class GramMatrix(nn.Module): def forward(self, input): b,c,h,w = input.size() F = input.view(b, c, h*w) G = torch.bmm(F, F.transpose(1,2)) G.div_(h*w) return G class GramMSELoss(nn.Module): def forward(self, input, target): out = nn.MSELoss()(GramMatrix()(input), target) return out Матрица Грама служит для устранения пространственной привязки деталей стиля.
Затем идет процесс загрузки и преобразования исходного и стилевого изображений
imgs = [style_img, content_img] imgs_torch = [to_mean_tensor(img) for img in imgs] if torch.cuda.is_available(): imgs_torch = [Variable(img.unsqueeze(0).cuda()) for img in imgs_torch] else: imgs_torch = [Variable(img.unsqueeze(0)) for img in imgs_torch] style_image, content_image = imgs_torch opt_img = Variable(content_image.data.clone(), requires_grad=True) Где style_img и content_img это входные изображения, которые преобразуются в тензоры и переносятся по возможности на видеокарту, а в opt_img будет содержаться результат переноса стиля, при этом в качестве начального берется исходное изображение.
Далее идет процесс выбора слоев, задания весов и инициализаций функций потерь
Код весов и потерь
И последний этап это сам процесс переноса стиля style_layers = ['relu1_1','relu2_1','relu3_1','relu4_1', 'relu5_1'] content_layers = ['relu4_2'] loss_layers = style_layers + content_layers losses = [GramMSELoss()] * len(style_layers) + [nn.MSELoss()] * len(content_layers) if torch.cuda.is_available(): losses = [loss.cuda() for loss in losses] style_weights = [1e3/n**2 for n in [64,128,256,512,512]] content_weights = [1e0] weights = style_weights + content_weights style_targets = [GramMatrix()(A).detach() for A in vgg(style_image, style_layers)] content_targets = [A.detach() for A in vgg(content_image, content_layers)] targets = style_targets + content_targets epochs = 300 opt = optim.LBFGS([opt_img]) def step_opt(): opt.zero_grad() out_layers = vgg(opt_img, loss_layers) layer_losses = [] for j, out in enumerate(out_layers): layer_losses.append(weights[j] * losses[j](out, targets[j])) loss = sum(layer_losses) loss.backward() return loss for i in range(0, epochs+1): loss = opt.step(step_opt) В заключении можно добавить несколько примеров:
Телеграм: t.me/ainewsline
Источник: habr.com