Пишем XGBoost с нуля — часть 2: градиентный бустинг
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2019-02-09 02:32

В прошлой статье мы разбирались, как устроены решающие деревья, и с нуля реализовали алгоритм построения, попутно оптимизируя и улучшая его. В этой статье мы реализуем алгоритм градиентного бустинга и в конце создадим свой собственный XGBoost. Повествование будет идти по той же схеме: пишем алгоритм, описываем его, в заверешение подводим итоги, сравнивая результаты работы с аналогами из Sklearn'а. В этой статье упор тоже будет сделан на реализацию в коде, поэтому всю теорию лучше почитать в другом вместе (например, в курсе ODS), и уже со знанием теории можно переходить к этой статье, так как тема достаточно сложная.
Теперь дадим чуть более строгое определение. Введём модель взвешенного голосования:
Здесь — это пространство, из которого берём объекты, — это коэффицент перед моделью и непосредственно сама модель, то есть дерево решений. Допустим, что уже на каком-то шаге с помощью описанных правил удалось добавить в композицию слабый алгоритм. Чтобы научиться понимать, какой-именно должен быть алгоритм на шаге , введем функцию ошибки:
Получается, что наилучшим алгоритмом будет тот, который сможет максимально уменьшать ошибку, полученную на предыдущих итерациях. И так как бустинг градиентный, то у этой функции ошибки обязательно должен существовать вектор антиградиента, вдоль которого можно двигаться в поисках минимума. Всё!
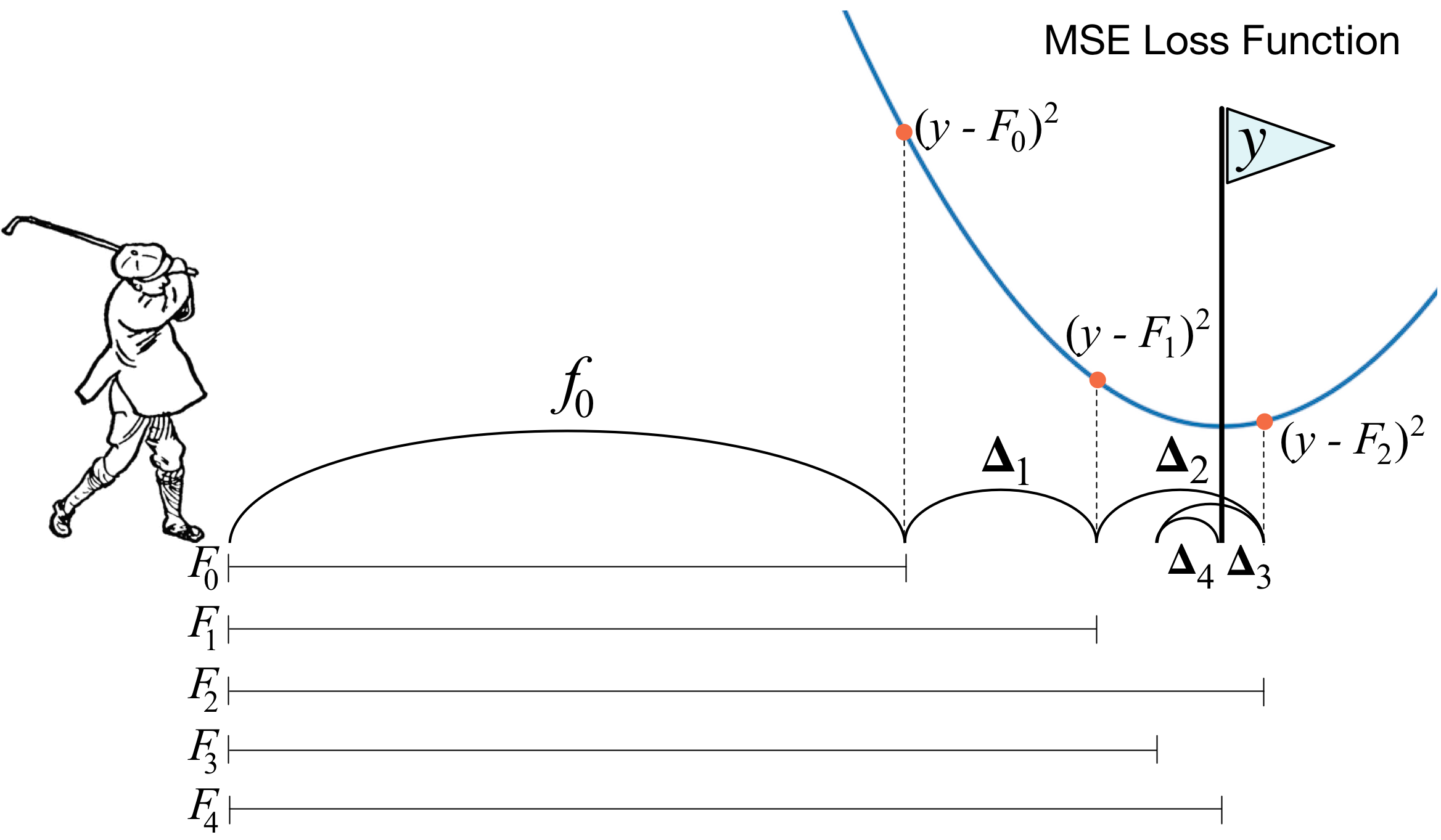
Непосредственно перед реализацией вставлю ещё пару слов о том, как именно у нас всё будет устроено. Как и в прошлой статье, в качестве лосса возьмем MSE. Посчитаем её градиент:
Таким образом, вектор антиградиента будет равен . На шаге мы считаем ошибки алгоритма, полученного на прошлых итерациях. Далее обучаем наш новый алгоритм на этих ошибках, а затем со знаком минус и каким-то коэффициентом добавляем к нашему ансамблю.
Теперь приступим к реализации.
1. Реализация обычного класса градиентного бустинга
import pandas as pd import matplotlib.pyplot as plt import numpy as np from tqdm import tqdm_notebook from sklearn import datasets from sklearn.metrics import mean_squared_error as mse from sklearn.tree import DecisionTreeRegressor import itertools %matplotlib inline %load_ext Cython %%cython -a import itertools import numpy as np cimport numpy as np from itertools import * cdef class RegressionTreeFastMse: cdef public int max_depth cdef public int feature_idx cdef public int min_size cdef public int averages cdef public np.float64_t feature_threshold cdef public np.float64_t value cpdef RegressionTreeFastMse left cpdef RegressionTreeFastMse right def __init__(self, max_depth=3, min_size=4, averages=1): self.max_depth = max_depth self.min_size = min_size self.value = 0 self.feature_idx = -1 self.feature_threshold = 0 self.left = None self.right = None def fit(self, np.ndarray[np.float64_t, ndim=2] X, np.ndarray[np.float64_t, ndim=1] y): cpdef np.float64_t mean1 = 0.0 cpdef np.float64_t mean2 = 0.0 cpdef long N = X.shape[0] cpdef long N1 = X.shape[0] cpdef long N2 = 0 cpdef np.float64_t delta1 = 0.0 cpdef np.float64_t delta2 = 0.0 cpdef np.float64_t sm1 = 0.0 cpdef np.float64_t sm2 = 0.0 cpdef list index_tuples cpdef list stuff cpdef long idx = 0 cpdef np.float64_t prev_error1 = 0.0 cpdef np.float64_t prev_error2 = 0.0 cpdef long thres = 0 cpdef np.float64_t error = 0.0 cpdef np.ndarray[long, ndim=1] idxs cpdef np.float64_t x = 0.0 # начальное значение - среднее значение y self.value = y.mean() # начальная ошибка - mse между значением в листе base_error = ((y - self.value) ** 2).sum() error = base_error flag = 0 # пришли на максимальную глубину if self.max_depth <= 1: return dim_shape = X.shape[1] left_value, right_value = 0, 0 for feat in range(dim_shape): prev_error1, prev_error2 = base_error, 0 idxs = np.argsort(X[:, feat]) # переменные для быстрого переброса суммы mean1, mean2 = y.mean(), 0 sm1, sm2 = y.sum(), 0 N = X.shape[0] N1, N2 = N, 0 thres = 1 while thres < N - 1: N1 -= 1 N2 += 1 idx = idxs[thres] x = X[idx, feat] # вычисляем дельты - по ним, в основном, будет делаться переброс delta1 = (sm1 - y[idx]) * 1.0 / N1 - mean1 delta2 = (sm2 + y[idx]) * 1.0 / N2 - mean2 # увеличиваем суммы sm1 -= y[idx] sm2 += y[idx] # пересчитываем ошибки за O(1) prev_error1 += (delta1**2) * N1 prev_error1 -= (y[idx] - mean1)**2 prev_error1 -= 2 * delta1 * (sm1 - mean1 * N1) mean1 = sm1/N1 prev_error2 += (delta2**2) * N2 prev_error2 += (y[idx] - mean2)**2 prev_error2 -= 2 * delta2 * (sm2 - mean2 * N2) mean2 = sm2/N2 # пропускаем близкие друг к другу значения if thres < N - 1 and np.abs(x - X[idxs[thres + 1], feat]) < 1e-5: thres += 1 continue if (prev_error1 + prev_error2 < error): if (min(N1,N2) > self.min_size): # переопределяем самый лучший признак и границу по нему self.feature_idx, self.feature_threshold = feat, x # переопределяем значения в листах left_value, right_value = mean1, mean2 # флаг - значит сделали хороший сплит flag = 1 error = prev_error1 + prev_error2 thres += 1 # ничего не разделили, выходим if self.feature_idx == -1: return # вызываем потомков дерева self.left = RegressionTreeFastMse(self.max_depth - 1) self.left.value = left_value self.right = RegressionTreeFastMse(self.max_depth - 1) self.right.value = right_value # новые индексы для обучения потомков idxs_l = (X[:, self.feature_idx] > self.feature_threshold) idxs_r = (X[:, self.feature_idx] <= self.feature_threshold) # обучение потомков self.left.fit(X[idxs_l, :], y[idxs_l]) self.right.fit(X[idxs_r, :], y[idxs_r]) def __predict(self, np.ndarray[np.float64_t, ndim=1] x): if self.feature_idx == -1: return self.value if x[self.feature_idx] > self.feature_threshold: return self.left.__predict(x) else: return self.right.__predict(x) def predict(self, np.ndarray[np.float64_t, ndim=2] X): y = np.zeros(X.shape[0]) for i in range(X.shape[0]): y[i] = self.__predict(X[i]) return yclass GradientBoosting(): def __init__(self, n_estimators=100, learning_rate=0.1, max_depth=3, random_state=17, n_samples = 15, min_size = 5, base_tree='Bagging'): self.n_estimators = n_estimators self.max_depth = max_depth self.learning_rate = learning_rate self.initialization = lambda y: np.mean(y) * np.ones([y.shape[0]]) self.min_size = min_size self.loss_by_iter = [] self.trees_ = [] self.loss_by_iter_test = [] self.n_samples = n_samples self.base_tree = base_tree def fit(self, X, y): self.X = X self.y = y b = self.initialization(y) prediction = b.copy() for t in tqdm_notebook(range(self.n_estimators)): if t == 0: resid = y else: # сразу пишем антиградиент resid = (y - prediction) # выбираем базовый алгоритм if self.base_tree == 'Bagging': tree = Bagging(max_depth=self.max_depth, min_size = self.min_size) if self.base_tree == 'Tree': tree = RegressionTreeFastMse(max_depth=self.max_depth, min_size = self.min_size) # обучаемся на векторе антиградиента tree.fit(X, resid) # делаем предикт и добавляем алгоритм к ансамблю b = tree.predict(X).reshape([X.shape[0]]) self.trees_.append(tree) prediction += self.learning_rate * b # добавляем только если не первая итерация if t > 0: self.loss_by_iter.append(mse(y,prediction)) return self def predict(self, X): # сначала прогноз – это просто вектор из средних значений ответов на обучении pred = np.ones([X.shape[0]]) * np.mean(self.y) # добавляем прогнозы деревьев for t in range(self.n_estimators): pred += self.learning_rate * self.trees_[t].predict(X).reshape([X.shape[0]]) return pred Построим теперь кривую лосса на обучающей выборке, чтобы убедиться, что при каждой итерации у нас действительно происходит его уменьшение.
GDB = GradientBoosting(n_estimators=50) GDB.fit(X,y) x = GDB.predict(X) plt.grid() plt.title('Loss by iterations') plt.plot(GDB.loss_by_iter)
2. Бэггинг над решающими деревьями
Отлично, перед тем как сравнивать результаты, давайте поговорим ещё и о процедуре бэггинга над деревьями. Тут вс просто: мы хотим защититься от переобучения, и поэтому с помощью выборок с возращением будем усреднять наши предсказания, чтобы случайно не напороться на выбросы (почему это так работает — лучше почитайте по ссылке).
class Bagging(): ''' Класс Bagging - предназначен для генерирования бустрапированного выбора моделей. ''' def __init__(self, max_depth = 3, min_size=10, n_samples = 10): #super(CART, self).__init__() self.max_depth = max_depth self.min_size = min_size self.n_samples = n_samples self.subsample_size = None self.list_of_Carts = [RegressionTreeFastMse(max_depth=self.max_depth, min_size=self.min_size) for _ in range(self.n_samples)] def get_bootstrap_samples(self, data_train, y_train): # генерируем индексы выборок с возращением indices = np.random.randint(0, len(data_train), (self.n_samples, self.subsample_size)) samples_train = data_train[indices] samples_y = y_train[indices] return samples_train, samples_y def fit(self, data_train, y_train): # обучаем каждую модель self.subsample_size = int(data_train.shape[0]) samples_train, samples_y = self.get_bootstrap_samples(data_train, y_train) for i in range(self.n_samples): self.list_of_Carts[i].fit(samples_train[i], samples_y[i].reshape(-1)) return self def predict(self, test_data): # для каждого объекта берём его средний предикт num_samples = test_data.shape[0] pred = [] for i in range(self.n_samples): pred.append(self.list_of_Carts[i].predict(test_data)) pred = np.array(pred).T return np.array([np.mean(pred[i]) for i in range(num_samples)]) Отлично, теперь в качестве базового алгоритма можем использовать не одно дерево, а бэггинг из деревьев — так мы, опять же, защитимся от переобучения.
3. Результаты
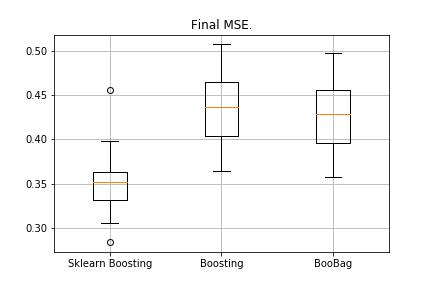
Сравним результаты наших алгоритмов.
from sklearn.model_selection import KFold import matplotlib.pyplot as plt from sklearn.ensemble import GradientBoostingRegressor as GDBSklearn import copy def get_metrics(X,y,n_folds=2, model=None): kf = KFold(n_splits=n_folds, shuffle=True) kf.get_n_splits(X) er_list = [] for train_index, test_index in tqdm_notebook(kf.split(X)): X_train, X_test = X[train_index], X[test_index] y_train, y_test = y[train_index], y[test_index] model.fit(X_train,y_train) predict = model.predict(X_test) er_list.append(mse(y_test, predict)) return er_list data = datasets.fetch_california_housing() X = np.array(data.data) y = np.array(data.target) er_boosting = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=40, base_tree='Tree' )) er_boobagg = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=40, base_tree='Bagging' )) er_sklearn_boosting = get_metrics(X,y,30,GDBSklearn(max_depth=3,n_estimators=40, learning_rate=0.1)) %matplotlib inline data = [er_sklearn_boosting, er_boosting, er_boobagg] fig7, ax7 = plt.subplots() ax7.set_title('') ax7.boxplot(data, labels=['Sklearn Boosting', 'Boosting', 'BooBag']) plt.grid() plt.show()Получили:
4. XGBoost
Прежде чем читать дальше, очень советую сначала ознакомиться со следующим видео, в нём очень хорошо объясняется теория. Вспомним, какую ошибку мы минимизируем в обычном бустинге:
XGBoost явно добавляет регуляризацию в этот функционал ошибки:
Как считать этот функционал? Сначала приближаем его с помощью ряда Тейлора второго порядка, где новый алгоритм рассматривается как приращение, вдоль которого мы будем двигаться, и дальше уже расписываем в зависимости от того, какой у нас лосс:
Необходимо определить, какое дерево мы будем считать плохим, а какое хорошим.
Вспомним, на каком принципе построена с регрессия с -регуляризацией — чем больше по норме значения коэффициентов перед регрессией, тем хуже, поэтому нужно, чтобы они были как можно меньше.
В XGBoost идея очень похожа: дерево штрафуется, если сумма нормы значений в листьях в нём очень большая. Поэтому сложность дерева здесь вводится следующим образом:
— значения в листьях, — количество листьев.
В видео есть переходные формулы, мы их здесь выводить не будем. Всё сводится к тому, что новое разбиение мы будем выбирать, максимизируя gain:
Здесь — это числовые параметры регуляризации, а — соответствующие суммы из первых и вторых производных при данном разбиении.
Всё, теория очень кратко изложена, ссылки даны, теперь поговорим, какими будут производные, если мы работает с MSE. Всё просто:
Когда будем считать суммы , к первой просто прибавляем , а ко второй — просто количество.
%%cython -a import numpy as np cimport numpy as np cdef class RegressionTreeGain: cdef public int max_depth cdef public np.float64_t gain cdef public np.float64_t lmd cdef public np.float64_t gmm cdef public int feature_idx cdef public int min_size cdef public np.float64_t feature_threshold cdef public np.float64_t value cpdef public RegressionTreeGain left cpdef public RegressionTreeGain right def __init__(self, int max_depth=3, np.float64_t lmd=1.0, np.float64_t gmm=0.1, min_size=5): self.max_depth = max_depth self.gmm = gmm self.lmd = lmd self.left = None self.right = None self.feature_idx = -1 self.feature_threshold = 0 self.value = -1e9 self.min_size = min_size return def fit(self, np.ndarray[np.float64_t, ndim=2] X, np.ndarray[np.float64_t, ndim=1] y): cpdef long N = X.shape[0] cpdef long N1 = X.shape[0] cpdef long N2 = 0 cpdef long idx = 0 cpdef long thres = 0 cpdef np.float64_t gl, gr, gn cpdef np.ndarray[long, ndim=1] idxs cpdef np.float64_t x = 0.0 cpdef np.float64_t best_gain = -self.gmm if self.value == -1e9: self.value = y.mean() base_error = ((y - self.value) ** 2).sum() error = base_error flag = 0 if self.max_depth <= 1: return dim_shape = X.shape[1] left_value = 0 right_value = 0 # начинаем процесс обучения # чуть-чуть матана - у нас mse, L = (y - pred)**2 # dL/dpred = pred - y, эту разницу мы в бустинге будем передавать со знаком - # dL^2/d^2pred = 1 - получается, это просто количество объектов в листе for feat in range(dim_shape): idxs = np.argsort(X[:, feat]) gl,gr = y.sum(),0.0 N1, N2, thres = N, 0, 0 while thres < N - 1: N1 -= 1 N2 += 1 idx = idxs[thres] x = X[idx, feat] gl -= y[idx] gr += y[idx] # считаем гейн gn = (gl**2) / (N1 + self.lmd) + (gr**2) / (N2 + self.lmd) gn -= ((gl + gr)**2) / (N1 + N2 + self.lmd) + self.gmm if thres < N - 1 and x == X[idxs[thres + 1], feat]: thres += 1 continue # проверяем условия на гейн if (gn > best_gain) and (min(N1,N2) > self.min_size): flag = 1 best_gain = gn left_value = -gl / (N1 + self.lmd) right_value = -gr / (N2 + self.lmd) self.feature_idx = feat self.feature_threshold = x thres += 1 self.gain = best_gain if self.feature_idx == -1: return self.left = RegressionTreeGain(max_depth=self.max_depth - 1, gmm=self.gmm, lmd=self.lmd) self.left.value = left_value self.right = RegressionTreeGain(max_depth=self.max_depth - 1, gmm=self.gmm, lmd=self.lmd) self.right.value = right_value idxs_l = (X[:, self.feature_idx] > self.feature_threshold) idxs_r = (X[:, self.feature_idx] <= self.feature_threshold) self.left.fit(X[idxs_l, :], y[idxs_l]) self.right.fit(X[idxs_r, :], y[idxs_r]) # подрубаем отрицательный гейн if (self.left.left == None or self.right.left == None): if self.gain < 0.0: self.left = None self.right = None self.feature_idx = -1 def __predict(self, np.ndarray[np.float64_t, ndim=1] x): if self.feature_idx == -1: return self.value if x[self.feature_idx] > self.feature_threshold: return self.left.__predict(x) else: return self.right.__predict(x) def predict(self, np.ndarray[np.float64_t, ndim=2] X): y = np.zeros(X.shape[0]) for i in range(X.shape[0]): y[i] = self.__predict(X[i]) return yНебольшое уточнение: чтобы формулы в деревьях с gain'ом были красивее, в бустинге обучаем таргет со знаком минус.
Слегка модифицируем наш бустинг, сделаем некоторые параметры адаптивными. Например, если замечаем, что лосс начал выходить на плато, то уменьшаем learning rate и увеличиваем max_depth у следующих эстиматоров. Также добавим новый бэггинг — теперь сделаем бустинг над бэггингами из деревьев с gain'ом:
class Bagging(): def __init__(self, max_depth = 3, min_size=5, n_samples = 10): self.max_depth = max_depth self.min_size = min_size self.n_samples = n_samples self.subsample_size = None self.list_of_Carts = [RegressionTreeGain(max_depth=self.max_depth, min_size=self.min_size) for _ in range(self.n_samples)] def get_bootstrap_samples(self, data_train, y_train): indices = np.random.randint(0, len(data_train), (self.n_samples, self.subsample_size)) samples_train = data_train[indices] samples_y = y_train[indices] return samples_train, samples_y def fit(self, data_train, y_train): self.subsample_size = int(data_train.shape[0]) samples_train, samples_y = self.get_bootstrap_samples(data_train, y_train) for i in range(self.n_samples): self.list_of_Carts[i].fit(samples_train[i], samples_y[i].reshape(-1)) return self def predict(self, test_data): num_samples = test_data.shape[0] pred = [] for i in range(self.n_samples): pred.append(self.list_of_Carts[i].predict(test_data)) pred = np.array(pred).T return np.array([np.mean(pred[i]) for i in range(num_samples)])class GradientBoosting(): def __init__(self, n_estimators=100, learning_rate=0.2, max_depth=3, random_state=17, n_samples = 15, min_size = 5, base_tree='Bagging'): self.n_estimators = n_estimators self.max_depth = max_depth self.learning_rate = learning_rate self.initialization = lambda y: np.mean(y) * np.ones([y.shape[0]]) self.min_size = min_size self.loss_by_iter = [] self.trees_ = [] self.loss_by_iter_test = [] self.n_samples = n_samples self.base_tree = base_tree # хотим как-то регулировать работу алгоритма на поздних итерациях # если ошибка застряла, то уменьшаем lr и увеличиваем max_depth self.add_to_max_depth = 1 self.init_mse_board = 1.5 def fit(self, X, y): print (self.base_tree) self.X = X self.y = y b = self.initialization(y) prediction = b.copy() for t in tqdm_notebook(range(self.n_estimators)): if t == 0: resid = y else: resid = (y - prediction) if (mse(temp_resid,resid) < self.init_mse_board): self.init_mse_board /= 1.5 self.add_to_max_depth += 1 self.learning_rate /= 1.1 # print ('Alert!', t, self.add_to_max_depth) if self.base_tree == 'Bagging': tree = Bagging(max_depth=self.max_depth+self.add_to_max_depth, min_size = self.min_size) resid = -resid if self.base_tree == 'Tree': tree = RegressionTreeFastMse(max_depth=self.max_depth+self.add_to_max_depth, min_size = self.min_size) if self.base_tree == 'XGBoost': tree = RegressionTreeGain(max_depth=self.max_depth+self.add_to_max_depth, min_size = self.min_size) resid = -resid tree.fit(X, resid) b = tree.predict(X).reshape([X.shape[0]]) # print (b.shape) self.trees_.append(tree) prediction += self.learning_rate * b temp_resid = resid return self def predict(self, X): # сначала прогноз – это просто вектор из средних значений ответов на обучении pred = np.ones([X.shape[0]]) * np.mean(self.y) # добавляем прогнозы деревьев for t in range(self.n_estimators): pred += self.learning_rate * self.trees_[t].predict(X).reshape([X.shape[0]]) return pred5. Результаты
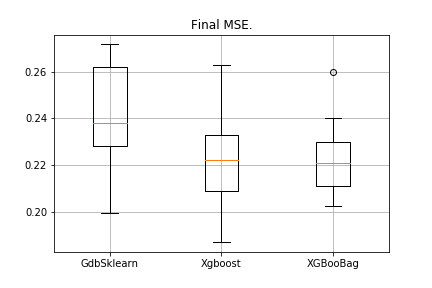
По традиции, сравним результаты:
data = datasets.fetch_california_housing() X = np.array(data.data) y = np.array(data.target) import matplotlib.pyplot as plt from sklearn.ensemble import GradientBoostingRegressor as GDBSklearn er_boosting_bagging = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=150,base_tree='Bagging')) er_boosting_xgb = get_metrics(X,y,30,GradientBoosting(max_depth=3, n_estimators=150,base_tree='XGBoost')) er_sklearn_boosting = get_metrics(X,y,30,GDBSklearn(max_depth=3,n_estimators=150,learning_rate=0.2)) %matplotlib inline data = [er_sklearn_boosting, er_boosting_xgb, er_boosting_bagging] fig7, ax7 = plt.subplots() ax7.set_title('') ax7.boxplot(data, labels=['GdbSklearn', 'Xgboost', 'XGBooBag']) plt.grid() plt.show()Картинка будет следующая:
Всем успехов!
Телеграм: t.me/ainewsline
Источник: habr.com