Рой автономных роботов продемонстрировал искусственный морфогенез
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2018-12-23 12:00
Исследователям из Испании, Великобритании и Нидерландов удалось воспроизвести самопроизвольный реакционно-диффузионный механизм Тьюринга в рое из 300 небольших килоботов, каждый из которых может общаться только с соседними роботами. Рой оказался способен к устойчивому формированию однотипных форм, а также «залечивать» повреждения. Исследование может помочь в разработке самоорганизующихся роев роботов, устойчивых к внешним воздействиям, рассказывают авторы статьи в Science Robotics.
Инженеры уже достаточно давно работают над созданием коллективных роботов, дронов и других автоматизированных устройств, которые способны вести себя как единый связанный объект. В этой области есть два основных подхода, которые были подсмотрены исследователями из наблюдений за взаимодействием живых объектов в природе. Первый подход — это иерархическое управление членами группы. Например, в некоторых условиях клетки в организме могут диференциироваться определенным образом, получая информацию от организма информацию о своем положении в нем. Второй подход — локальная самоорганизация, при которой объект не имеет данных о своем положении и его действия основаны только на взаимодействии с соседними членами группы. Такой тип взаимодействия позволяет сделать группу объектов, например, рой роботов, полностью автономным и самоуправляемым.
Один из примеров второго подхода, который реализовали авторы новой работы — это реакционно-диффузионный механизм морфогенеза, описанный Аланом Тьюрингом в 1952 году. Он показал, что в двухкомпонентной системе с их изначально гомогенным распределением могут возникать стационарные неоднородные структуры из-за того, что компоненты имеют разные коэффициенты диффузии. Такой механизм проявляется как в химических реакциях, например, в реакции Белоусова-Жаботинского, так и в биологических объектах. К примеру, таким образом формируется пятнистая или волнообразная периодическая окраска некоторых животных, а также формируются органы, такие как пальцы. В живых организмах за морфогенез (формирование органов) отвечает генетическая регулирующая сеть — набор клеток и молекул, с помощью которых они передают сигналы друг другу и регулируют экспрессию генов, что в свою очередь приводит к формированию неоднородностей.
Исследователи под руководством Джеймса Шарпе (James Sharpe) из Барселонского института науки и технологий воспроизвели механизм морфогенеза в живых организмах с помощью килоботов — небольших роботов, предназначенных для исследований в области коллективных роботов. Килобот представляет собой небольшого робота на трех металлических ножках, оснащенного светодиодами, инфракрасными передатчиком и приемником, вычислительным блоком, а также двумя вибромоторами, благодаря которым робот может двигаться.
Алгоритм, разработанный исследователями, имитирует передачу между килоботами двух виртуальных молекул — активатора U и ингибитора V. Каждый робот рассчитывает концентрацию активатора и ингибитора, и передает данные соседям на расстоянии десяти сантиметров. Алгоритм робота устроен таким образом, что он стремится переместиться из области с низкой концентрацией активатора в область с высокой концентрацией. Из-за этого роботы, находящиеся на краях роя периодически начинают перемещаться по краю до момента, когда они доходят до места с высокой концентрацией.Эксперименты показали,что рои роботов, изначально имевшие круглую форму, формируют определенные похожие структуры с выступами.
Также исследователи показали, что рой роботов под управлением такого алгоритма способен самостоятельно восстанавливаться после получения ранений. Они проверили две ситуации — разрезание роя пополам и отрезание одного из выступов. В первом случае рой постепенно срастался обратно, а во втором он либо залечивал частично отрезанный выступ, либо отращивал новый на другом краю. Таким образом, рой всегда приводил свою структуру к периодической и равномерной, даже в случае сильных повреждений.

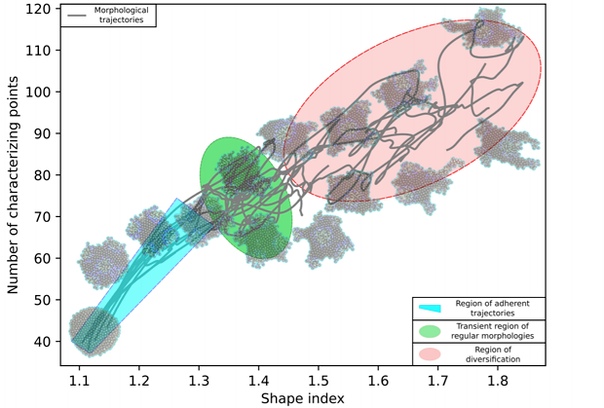
После проведения экспериментов исследователи провели анализ динамики морфогенеза роя. Они выбрали для этого две метрики — индекс формы (насколько сильно форма отличается от изначального круга) и уровень шероховатости поверхности. Построив график эволюции формы с этими метриками, они обнаружили три этапа морфогенеза: начальный этап, на котором все экземпляры роя вели себя почти идентично, промежуточный этап, во время которого рои имели крестообразную форму, и этап диверсификации, на котором каждый рой преобразовывал свою форму из крестообразной в специфичную для него вариацию:
В прошлом году группа ученых из Бристольского университета, в которую входила один из авторов новой работы, показала на примере килоботов другой пример самоорганизации. Ученые создавали ситуацию, при которой роботы имели два мнения при решении вопроса, а часть роботов была сломана и выбирала мнение хаотично, не основываясь на показаниях соседей. Эксперименты показали, что если добавить в рой неопределившихся со своим мнением роботов, в конце концов он придет ко стопроцентному консенсусу, тогда как при наличии только убежденных роботов консенсус недостижим даже на больших промежутках времени. А французские исследователи показали, что хаотичный рой роботов ограничить подвижной деформируемой стенкой, то они самопроизвольно формируют кластеры, и вся система начинает двигаться направленно. Ученые продемонстрировали, как такой рой роботов преодолевает небольшие препятствия и просачивается сквозь щели.
Григорий Копиев
Телеграм: t.me/ainewsline
Источник: nplus1.ru