Звоним на Марс: как NASA осуществляет связь с Curiosity
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2018-08-09 14:30
Станции космической связи
Любая из космических миссий NASA рассчитана на то, что связь с космическим аппаратом должна быть возможна 24 часа в сутки (ну или по крайней мере всегда, когда она может быть возможна в принципе). Поскольку, как нам известно, Земля довольно быстро вращается вокруг собственной оси, для обеспечения непрерывности сигнала необходимо несколько точек для приема/передачи данных. Именно такими точками и являются станции DSN. Они расположены на трех континентах и удалены друг от друга примерно на 120 градусов долготы, что позволяет им частично перекрывать зоны действия друг друга, и, благородя этому, «вести» космический аппарат 24 часа в сутки. Для этого, когда космический аппарат выходит из зоны действия одной из станций, его сигнал перебрасывается ну другую.
Один из комплексов DSN находится в США (Goldstone complex), второй — в Испании (около 60 километров от Мадрида), а третий — в Австралии (примерно в 40 километрах от Канберры).

Передача:
- X-диапазон (7145-7190 МГц)
- S-диапазон (2025-2120 МГц)
Прием:
- X-диапазон (8400-8500 МГц)
- S-диапазон (2200-2300 МГц)
- Ka-диапазон (31.8-32.3 ГГц)
Точность позиционирования:
- в пределах 0.015° (точность наводки на точку небосвода)
- в пределах 0.25мм (точность перемещения самой антенны)
Скорость поворота:
- 2.0°/сек
Устойчивость к ветру:
- Постоянный ветер 72км/ч
- Порывы +88км/ч
- Максимальная расчетная — 160км/ч

Передача:
- X-диапазон (7145-7190 МГц)
- S-диапазон (2025-2120 МГц)
Прием:
- X-диапазон (8400-8500 МГц)
- S-диапазон (2200-2300 МГц)
- L-диапазон (1626-1708 МГц)
- K-диапазон (12.5 ГГц)
- Ku-диапазон (18-26 ГГц)
Точность позиционирования:
- в пределах 0.005° (точность наводки на точку небосвода)
- в пределах 0.25мм (точность перемещения самой антенны)
Скорость поворота:
- 0.25°/сек
Устойчивость к ветру:
- Постоянный ветер 72км/ч
- Порывы +88км/ч
- Максимальная расчетная — 160км/ч

Передача:
- X-диапазон (7145-7190 МГц)
Прием:
- X-диапазон (8400-8500 МГц)
- S-диапазон (2200-2300 МГц)
Точность позиционирования:
- в пределах 0.015° (точность наводки на точку небосвода)
- в пределах 0.25мм (точность перемещения самой антенны)
Скорость поворота:
- 0.8°/сек
Устойчивость к ветру:
- Постоянный ветер 72км/ч
- Порывы +88км/ч
- Максимальная расчетная — 160км/ч
Слежение — система слежения должна обеспечивать возможность двусторонней коммуникации между Землей и космическим аппаратом, и проводить расчеты его местоположения и вектора скорости для правильного позиционирования терелки.
Управление — дает специалистам возможность передавать управляющие команды на космический аппарат.
Мониторинг и контроль — позволяю контролировать и управлять системами самой DSN
Стоит отметить, что австралийская станция обслуживает на сегодняшний день около 45 космических аппаратов, так что расписание времени ее работы четко регламентировано, и получить дополнительное время не так-то просто. У каждой из антенн также имеется техническая возможность обслуживать до двух разных аппаратов одновременно.
Итак, данные, которые должны быть переданы на ровер, присылают на станцию DSN, откуда они отправляются в свое недолгое (от 5 до 20 минут) космическое путешествие к Красной Планете. Давайте теперь перейдем к рассмотрению самого ровера. Какие средства связи имеются у него?
Curiosity
Curiosity оснащен тремя антеннами, каждая из которых может использоваться и для приема и для передачи информации. Это UHF-антенна, LGA и HGA.[1] Все они расположены на «спине» ровера, в различных местах.
[1]
HGA — High Gain Antenna
MGA — Medium Gain Antenna
LGA — Low Gain Antenna
UHF — Ultra High Frequency
Поскольку аббревиатуры HGA, MGA и LGA уже имеют в себе слово antenna, я не буду приписывать к ним это слово повторно, в отличие от аббревиатуры UHF.
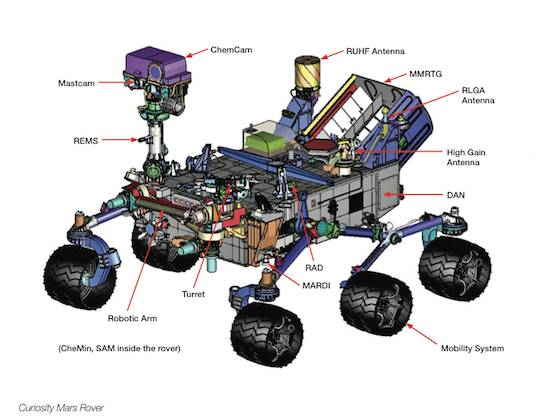
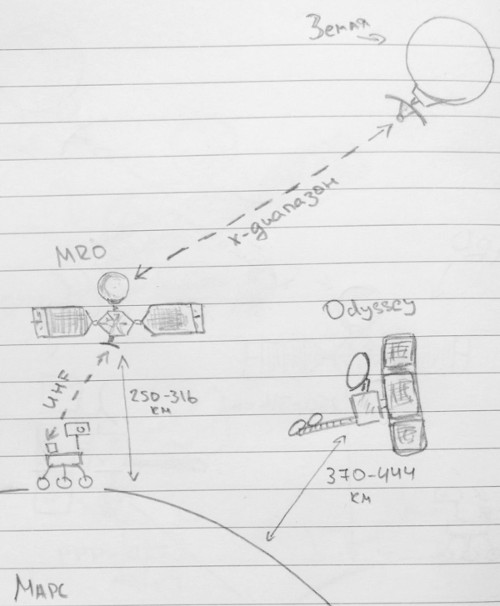
 UHF-антенна используется чаще всего. С ее помощью, ровер может передавать данные через спутники MRO и Odyssey (о которых мы поговорим дальше) на частоте около 400 мегагерц. Использование спутников для передачи сигнала является предпочтительным из-за того, что они находятся в поле зрения DSN-станций гораздо дольше, чем сам ровер, одиноко сидящий на поверхности Марса. К тому же, поскольку они значительно ближе к марсоходу, последнему нужно затрачивать меньше энергии для передачи данных. Скорость передачи может достигать 256кб/с для Odyssey и до 2 мбит/с для MRO. Большая часть информации, приходящей от Curiosity, проходит именно через спутник MRO. Сама UHF-антенна находится в задней части ровера, и внешне выглядит как серый цилиндр.
UHF-антенна используется чаще всего. С ее помощью, ровер может передавать данные через спутники MRO и Odyssey (о которых мы поговорим дальше) на частоте около 400 мегагерц. Использование спутников для передачи сигнала является предпочтительным из-за того, что они находятся в поле зрения DSN-станций гораздо дольше, чем сам ровер, одиноко сидящий на поверхности Марса. К тому же, поскольку они значительно ближе к марсоходу, последнему нужно затрачивать меньше энергии для передачи данных. Скорость передачи может достигать 256кб/с для Odyssey и до 2 мбит/с для MRO. Большая часть информации, приходящей от Curiosity, проходит именно через спутник MRO. Сама UHF-антенна находится в задней части ровера, и внешне выглядит как серый цилиндр. Curiosity также имеет HGA, которую он может использовать для получения команд напрямую с Земли. Эта антенна подвижна (ее можно направить в сторону Земли), то есть для ее использования роверу не приходится менять свое местоположение, достаточно просто повернуть HGA в нужную сторону, а это позволяет сохранять энергию. HGA смонтирована примерно посередине с левого борта ровера, и представляет собой шестигранник диаметром около 30 сантиметров. HGA может передавать данные прямо на Землю со скоростью около 160 бит/сек на 34-метровые антенны, или со скоростью до 800 бит/сек на 70-метровые.
Curiosity также имеет HGA, которую он может использовать для получения команд напрямую с Земли. Эта антенна подвижна (ее можно направить в сторону Земли), то есть для ее использования роверу не приходится менять свое местоположение, достаточно просто повернуть HGA в нужную сторону, а это позволяет сохранять энергию. HGA смонтирована примерно посередине с левого борта ровера, и представляет собой шестигранник диаметром около 30 сантиметров. HGA может передавать данные прямо на Землю со скоростью около 160 бит/сек на 34-метровые антенны, или со скоростью до 800 бит/сек на 70-метровые. Наконец, третья антенна — это так называемая LGA.
Наконец, третья антенна — это так называемая LGA.Она посылает и принимает сигналы в любых направлениях. Работает LGA в X-диапазоне (7-8 ГГц). Тем не менее, мощность этой антенны довольно мала, а скорость передачи оставляет желать лучшего. Из-за этого она в основном используется для приема информации, а не для ее передачи.
На фото LGA — это белая башенка на переднем плане.
На заднем плане видна UHF-антенна.
Стоит отметить, что марсоход генерирует огромное количество научных данных, и не всегда все их удается отправить. Специалисты NASA устанавливают приоритеты важности: информация с наибольшим приоритетом будет передана в первую очередь, а информация с меньшим приоритетом будет ждать следующего коммуникационного окна. Иногда часть наименее важных данных и вовсе приходится удалять.
Спутники Odyssey и MRO
Итак, мы выясняли, что обычно для связи с Curiosity необходимо «промежуточное звено» в виде одного из спутников. Благодаря этому удается увеличить время, в течение которого связь с Curiosity вообще возможна, а также увеличить скорость передачи, так как более мощные антенны спутников способны передавать на Землю данные с гораздо большей скоростью.
Каждый из спутников имеет два коммуникационных окна с марсоходом в каждый сол. Обычно эти окна достаточно коротки — всего несколько минут. В случае крайней необходимости, Curiosity может также связаться со спутником Европейского Космического Агентства Mars Express Orbiter.
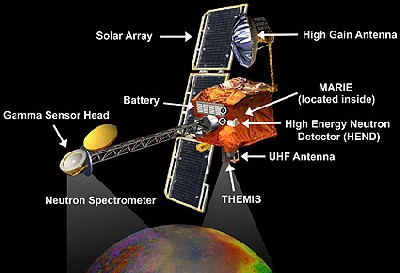
Mars Odyssey
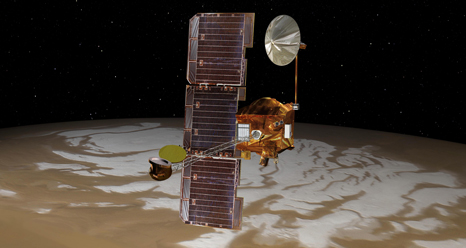
Спутник Mars Odyssey был запущен в 2001 году и предназначен изначально для изучения строения планеты и поиска минералов. Спутник имеет размеры 2,2х2,6х1,7 метра и массу более 700 килограмм. Высота его орбиты колеблется от 370 до 444 километров. Этот спутник активно использовался предыдущими марсоходами: около 85 процентов данных, полученных со Spirit и Opportunity, были транслированы именно через него. Odyssey может общаться с Curiosity в UHF-диапазоне. Что касается средств коммуникации, у него имеются HGA, MGA (medium gain antenna), LGA и UHF-антенна. В основном, для передачи данных на Землю используется HGA, имеющая диаметр 1.3 метра. Передача ведется на частоте 8406 МГц, а прием данных осуществляется на частоте 7155 МГц. Угловой размер луча составляет порядка двух градусов.
Коммуникации с роверами осуществляются с помощью UHF-антенны на частотах 437 МГц (передача) и 401 МГц (прием), скорость обмена данными может составлять 8, 32, 128 или 256 кб/сек.
Mars Reconnaissance Orbiter
В 2006 году к спутнику Odyssey присоединился MRO — Mars Reconnaissance Orbiter, который сегодня является основным собеседником Curiosity.
Однако, помимо работы связиста, сам MRO имеет внушительный арсенал научных приборов, и, что самое интересное, оборудован камерой HiRISE, которая представляет собой, по сути, телескоп-рефлектор. Находясь на высоте 300 километров, HiRISE может делать снимки с разрешением до 0.3 метра на пиксель (для сравнения, спутниковые снимки Земли обычно доступны с разрешением около 0.5 метра на пиксель). MRO может также создавать стереопары поверхности с точностью до умопомрачительных 0.25 метров. Я настоятельно рекомендую вам ознакомиться хотя бы с несколькими снимками, которые доступны, например, здесь. Чего стоит, например, вот это изображение кратера Виктория (кликабельно, оригинал около 5 мегабайт):


Обратите внимание на то, что большинство цветных снимков сделаны в расширенном диапазоне, так что если вы наткнетесь на снимок, на котором часть поверхности будет ярко сине-зеленоватого цвета, не спешите заниматься конспирологией ;) Зато вы можете быть точно уверены, что на разных снимках одинаковые породы будут иметь одинаковый цвет. Однако, вернемся к системам связи.
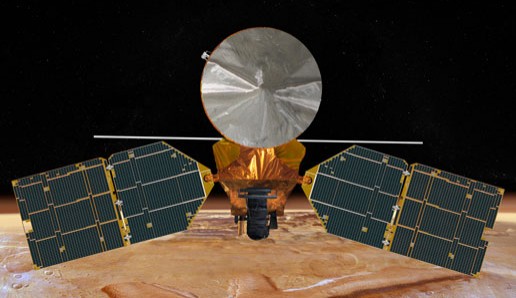
MRO оборудован четырьмя антеннами, которые по назначению совпадают с антеннами марсохода — это UHF-антенна, HGA и две LGA. Основная используемая спутником антенна — HGA — имеет диаметр три метра, и работает в X-диапазоне. Именно она используется для передачи данных на Землю. HGA также оборудована 100-ваттным усилителем сигнала.
1 — HGA, 3 — UHF, 10 — LGA (обе LGA смонтированны прямо на HGA)
Curiosity и MRO общаются с помощью UHF-антенны, коммуникационное окно открывается дважды в сол, и продолжается примерно 6-9 минут. MRO выделяет 5Гб в день для данных, полученных с роверов, и хранит их до тех пор, пока не окажется в зоне видимости одной из станций DSN на Земле, после чего передает данные туда. Передача данных к марсоходу осуществляется по такому же принципу. На хранение команд, которые должны быть переданы на марсоход, выделяется 30 Мб/сол.
Станции DSN ведут MRO по 16 часов в сутки (остальные 8 часов спутник находится с обратной стороны Марса, и не может вести обмен данными, так как закрыт планетой), 10-11 из которых он передает данные на Землю. Обычно спутник в течение трех дней в неделю работает с 70-метровой антенной DSN, и дважды — с 34-метровой антенной (к сожалению непонятно чем он занимается в оставшиеся два дня, но вряд ли у него есть выходные). Скорость передачи может варьироваться от 0,5 до 4 мегабит в секунду — она уменьшается при отдалении Марса от Земли и увеличивается при сближении двух планет. Сейчас (на момент публикации статьи) Земля и Марс находятся почти на максимальном расстоянии друг от друга, так что скорость передачи скорее всего не очень велика.
NASA утверждает (на сайте спутника есть специальный виджет), что за все время работы MRO передал на Землю более 187 терабит (!) данных — это больше, чем все аппараты, посланные в космос до него, вместе взятые.
Заключение
Итак, подведем итоги. При передаче управляющих команд на марсоход, происходит следующее:
- Специалисты JPL отправляют команды на одну из станций DSN.
- Во время сеанса связи с одним из спутников (скорее всего, это будет MRO), станция DSN передает ему набор команд.
- Спутник сохраняет данные во внутренней памяти, и ожидает следующего коммуникационного окна с марсоходом.
- Когда марсоход оказывается в зоне доступа, спутник передает ему управляющие команды.
При передаче данных с марсохода на Землю, все это происходит в обратном порядке:
- Ровер хранит свои научные данные во внутренней памяти и ожидает ближайшего коммуникационного окна со спутником.
- Когда спутник оказывается доступен, ровер передает ему информацию.
- Спутник получает данные, сохраняет их в своей памяти, и ожидает доступности одной из станций DSN
- Когда станция DSN становится доступна, спутник отправляет ей полученные данные.
- Наконец, после получения сигнала, станция DSN декодирует его, и отправляет полученные данные тем, для кого они предназначены.
Надеюсь, мне удалось более-менее кратко описать процесс связи с Curiosity. Вся эта информация (на английском языке; плюс огромная куча дополнительной, включая, например, довольно подробные технические отчеты о принципах работы каждого из спутников) доступна на различных сайтах JPL, ее очень легко найти, если знать, что именно вас интересует.
Пожалуйста, сообщайте о всех ошибках и опечатках в личку!
Телеграм: t.me/ainewsline
Источник: habr.com