Обзор топологий глубоких сверточных нейронных сетей
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2018-07-29 16:58

Переход от нейрофизиологии к компьютерному зрению
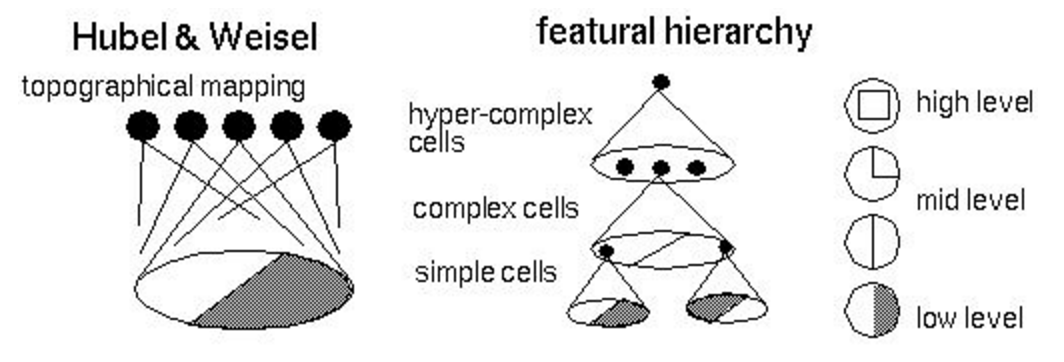
 Начать рассказ следовало бы с пионеров области нейронных сетей (не только искусственных) и их вклада: формальной модели нейрона МакКаллока — Питтса, теории обучения Хебба, персептрона Розенблатта, экспериментов Пола Бах-и-Риты и других, но, пожалуй, я оставлю это читателям для самостоятельной работы. Так что предлагаю сразу перейти к Дэвиду Хьюбелу и Торстену Визелю, нобелевским лауреатам 1981 года. Они получили премию за работу, проведенную в 1959 году (в то же время Розенблатт ставил свои эксперименты). Формально премия выдана за «работы, касающиеся принципов переработки информации в нейронных структурах и механизмов деятельности головного мозга». Стоит сразу предостеречь чувствительных читателей: далее будет описан эксперимент над котиками. Модель эксперимента изображена на рисунке ниже: коту на темном экране под различными углами демонстрируется яркий вытянутый движущийся прямоугольник; электрод осциллографа подсоединен к затылочной части головного мозга, где у млекопитающих находится центр обработки визуальной информации. В процессе эксперимента ученые наблюдали следующие эффекты (вы легко найдете аналогии с современными сверточными сетями и рекуррентными сетями):
Начать рассказ следовало бы с пионеров области нейронных сетей (не только искусственных) и их вклада: формальной модели нейрона МакКаллока — Питтса, теории обучения Хебба, персептрона Розенблатта, экспериментов Пола Бах-и-Риты и других, но, пожалуй, я оставлю это читателям для самостоятельной работы. Так что предлагаю сразу перейти к Дэвиду Хьюбелу и Торстену Визелю, нобелевским лауреатам 1981 года. Они получили премию за работу, проведенную в 1959 году (в то же время Розенблатт ставил свои эксперименты). Формально премия выдана за «работы, касающиеся принципов переработки информации в нейронных структурах и механизмов деятельности головного мозга». Стоит сразу предостеречь чувствительных читателей: далее будет описан эксперимент над котиками. Модель эксперимента изображена на рисунке ниже: коту на темном экране под различными углами демонстрируется яркий вытянутый движущийся прямоугольник; электрод осциллографа подсоединен к затылочной части головного мозга, где у млекопитающих находится центр обработки визуальной информации. В процессе эксперимента ученые наблюдали следующие эффекты (вы легко найдете аналогии с современными сверточными сетями и рекуррентными сетями):
- определенные области зрительной коры активируются только тогда, когда линия проецируется на определенную часть сетчатки;
- уровень активности нейронов области изменяется при изменении угла наклона прямоугольника;
- некоторые области активируются только тогда, когда объект движется в определенном направлении.
- соседние нейроны обрабатывают сигналы с соседних областей сетчатки;
- нейроны образуют иерархическую структуру (изображение ниже), где каждый следующий уровень выделяет все более и более высокоуровневые признаки (сегодня мы уже умеем эффективно манипулировать этими признаками);
- нейроны организованы в так называемые колонки — вычислительные блоки, которые трансформируют и передают информацию от уровня к уровню.
Gradient-based learning applied to document recognition (1998)
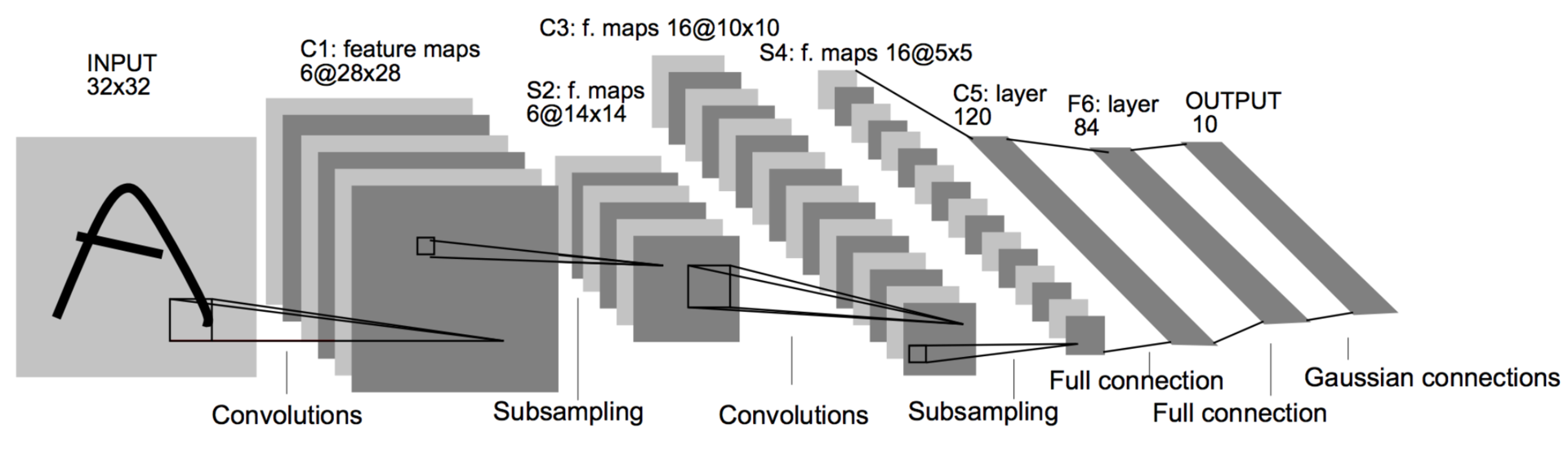
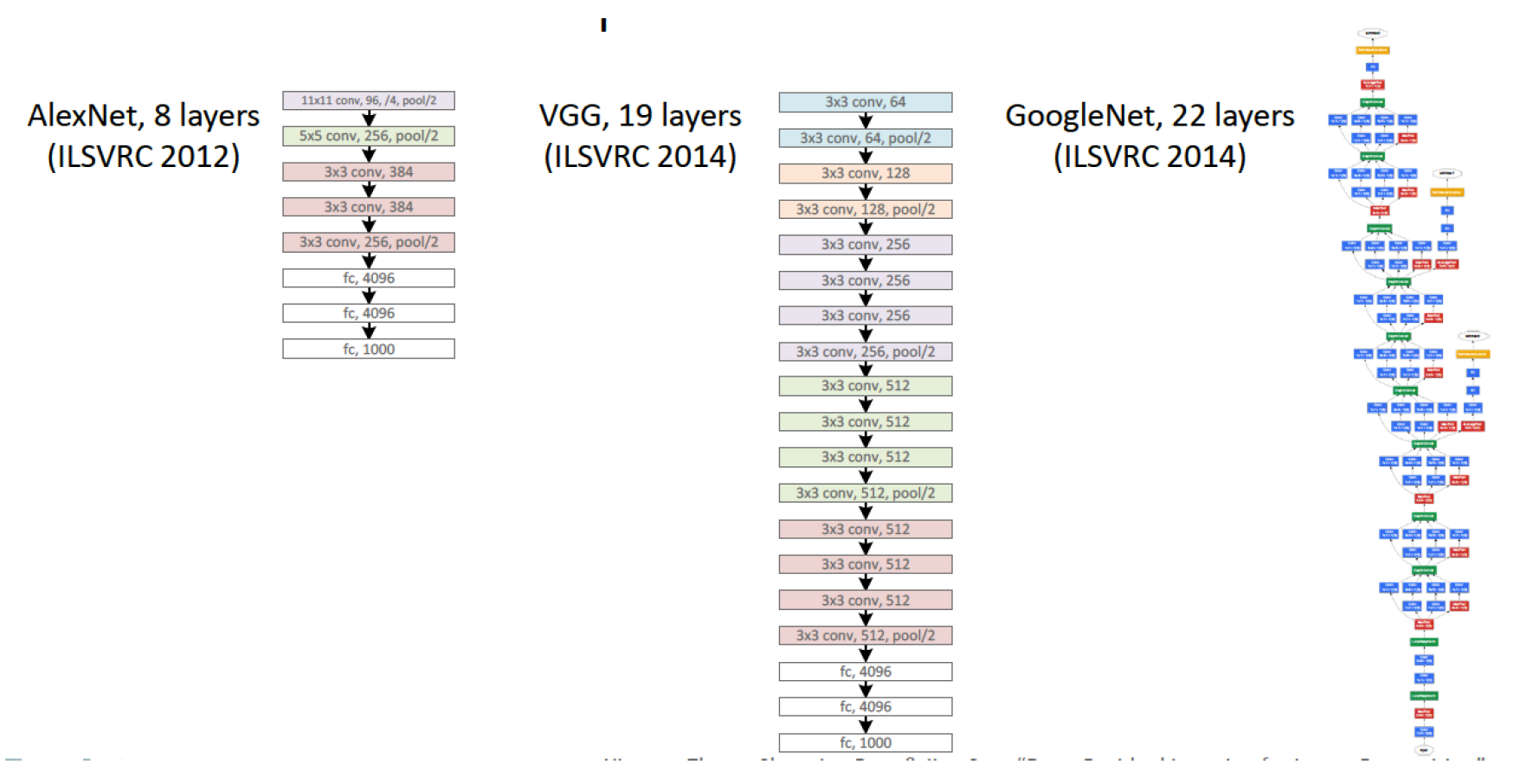
Спустя много лет настал 1998 год. Зима прошла. Ян ЛеКунн, который уже давно побывал постдоком одного из авторов статьи об алгоритме обратного распространения ошибки, публикует работу (в соавторстве с другими корифеями нейронных сетей), в которой смешивает идеи сверток и пулинга с бекпропом, в итоге получая первую работающую сверточную нейронную сеть. Ее внедрили в почту США для распознавания индексов. Эта архитектура была стандартным шаблоном для построения сверточных сетей вплоть до недавнего времени: свертка чередуется с пулингом несколько раз, затем несколько полносвязных слоев. Такая сеть состоит из 60 тысяч параметров. Основные строительные блоки — свертки 5 ? 5 со сдвигом 1 и пулинг 2 ? 2 со сдвигом 2. Как вы уже знаете, свертки играют роль детекторов признаков, а пулинг (или сабсемплинг) используют для уменьшения размерности, эксплуатируя тот факт, что изображения обладают свойством локальной скоррелированности пикселей — соседние пиксели, как правило, не сильно отличаются друг от друга. Таким образом, если из нескольких соседних получить какой-либо агрегат, то потери информации будут незначительными.
ImageNet Classification with Deep Convolutional Neural Networks (2012)
Прошло еще 14 лет. Алекс Крижевский из той же лаборатории, где был постдоком ЛеКун, добавил последние ингредиенты к формуле. Глубокое обучение = модель + теория обучения + большие данные + железо. GPU позволило значительно увеличить количество обучаемых параметров. Модель содержит 60 миллионов параметров, на три порядка больше, для обучения такой модели использовалось два графических ускорителя.
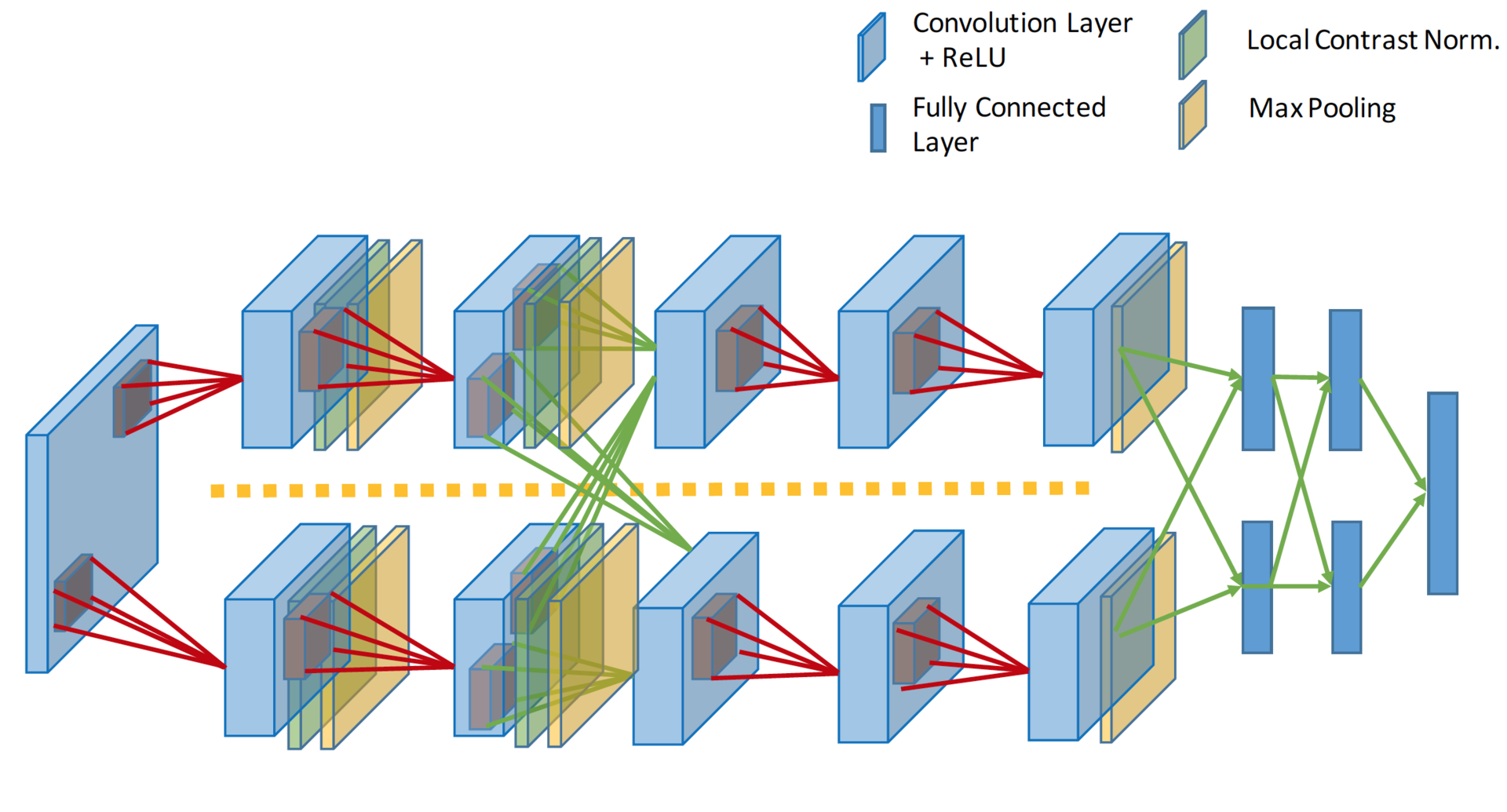
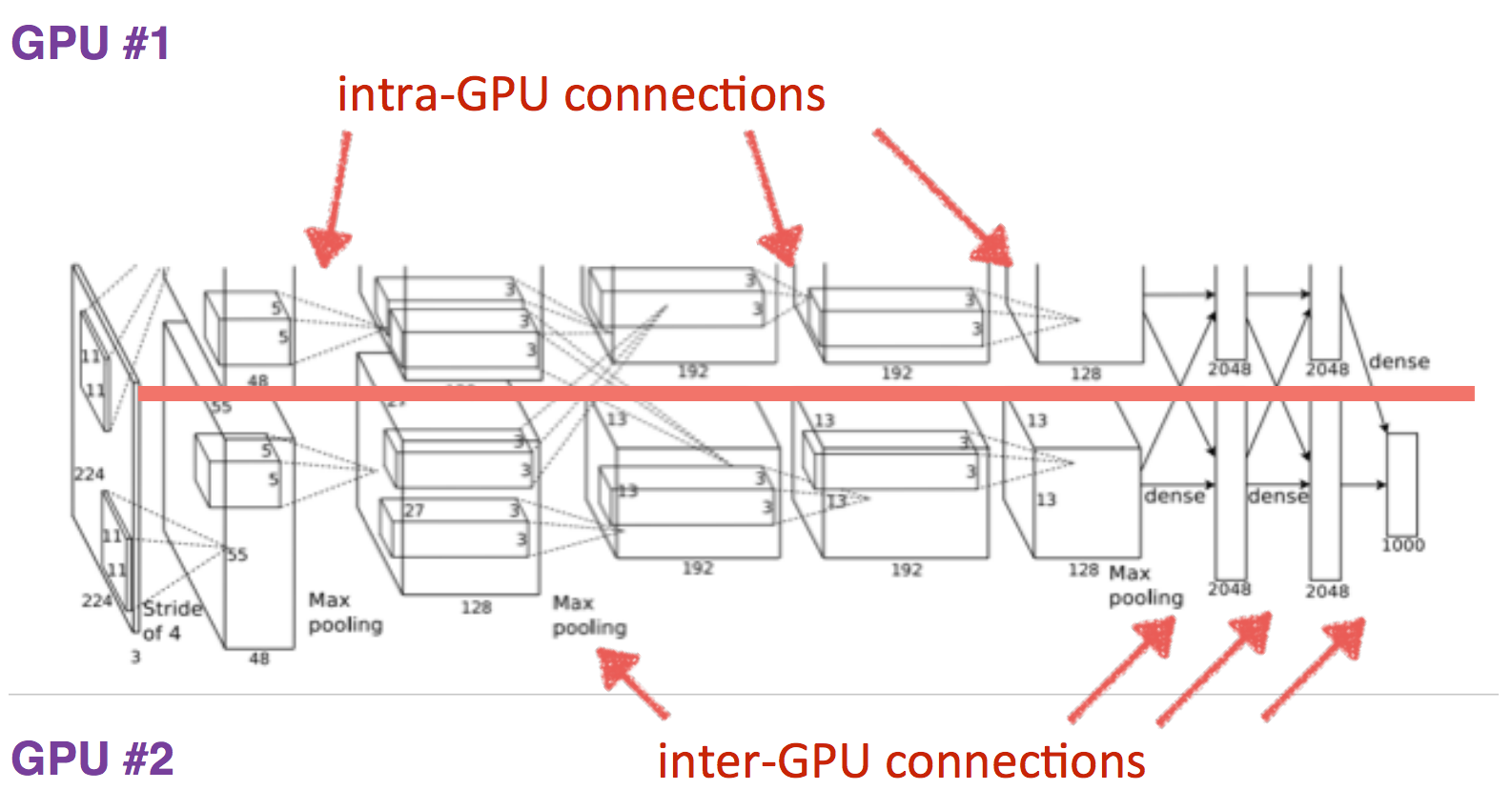
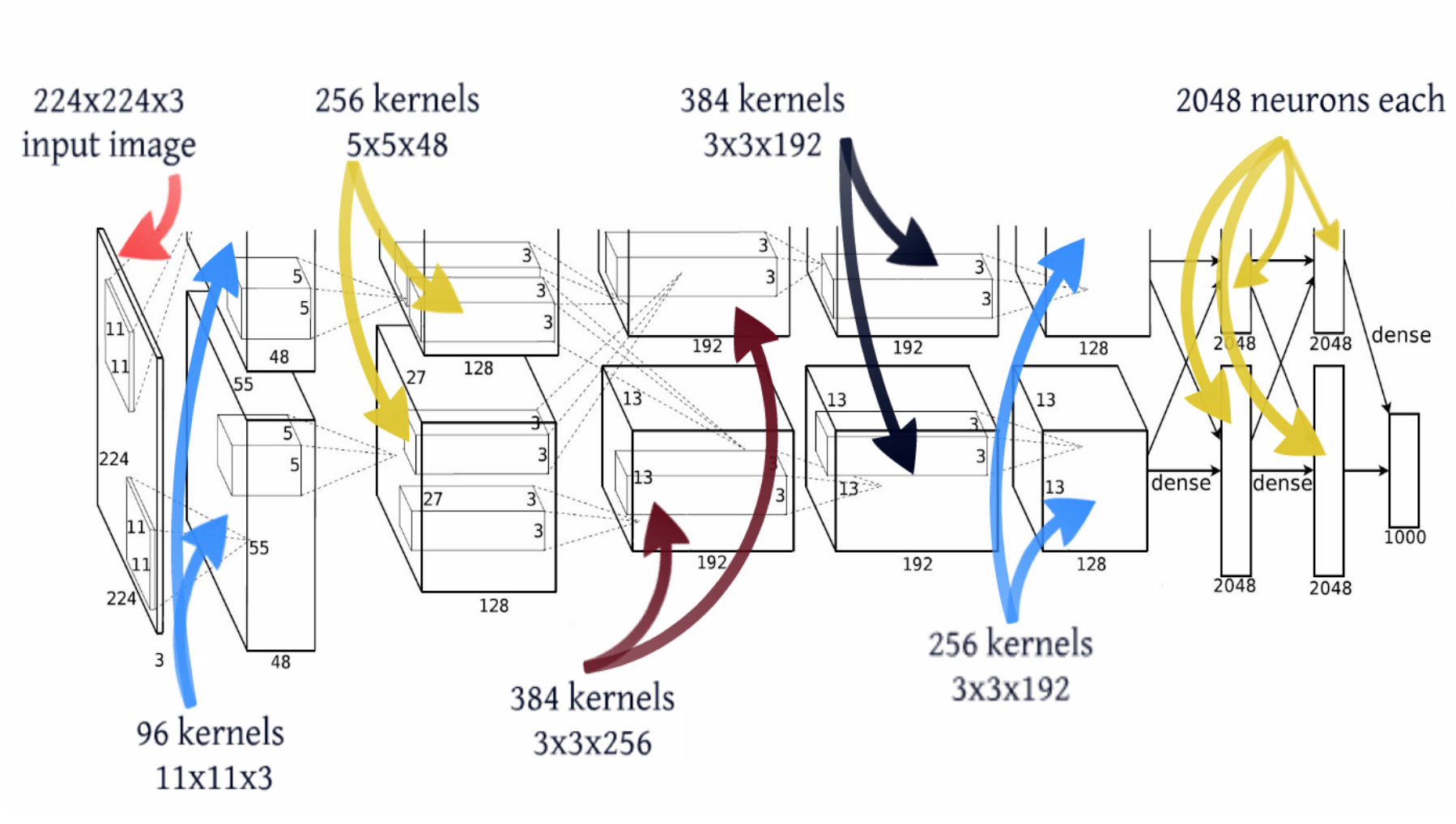
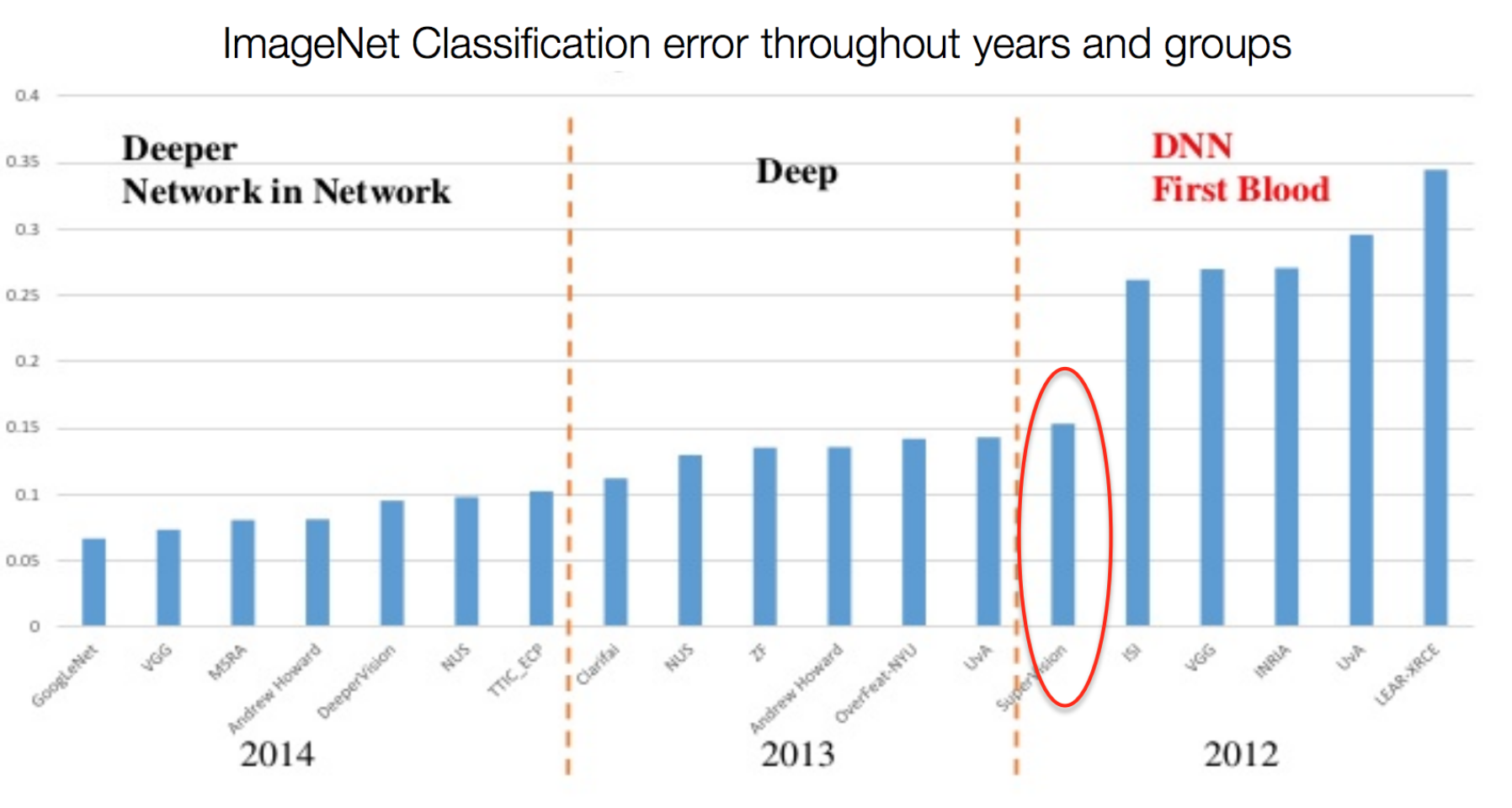
Также были применены другие трюки для избежания переобучения, и некоторые из них сегодня являются стандартными для глубоких сетей: DropOut (RIP), Data Augmentation и ReLu. Мы не будем заострять внимание на этих трюках, сосредоточимся на топологии модели. Добавлю только, что с 2012 года не нейросетевые модели больше не побеждали в имаджнете.
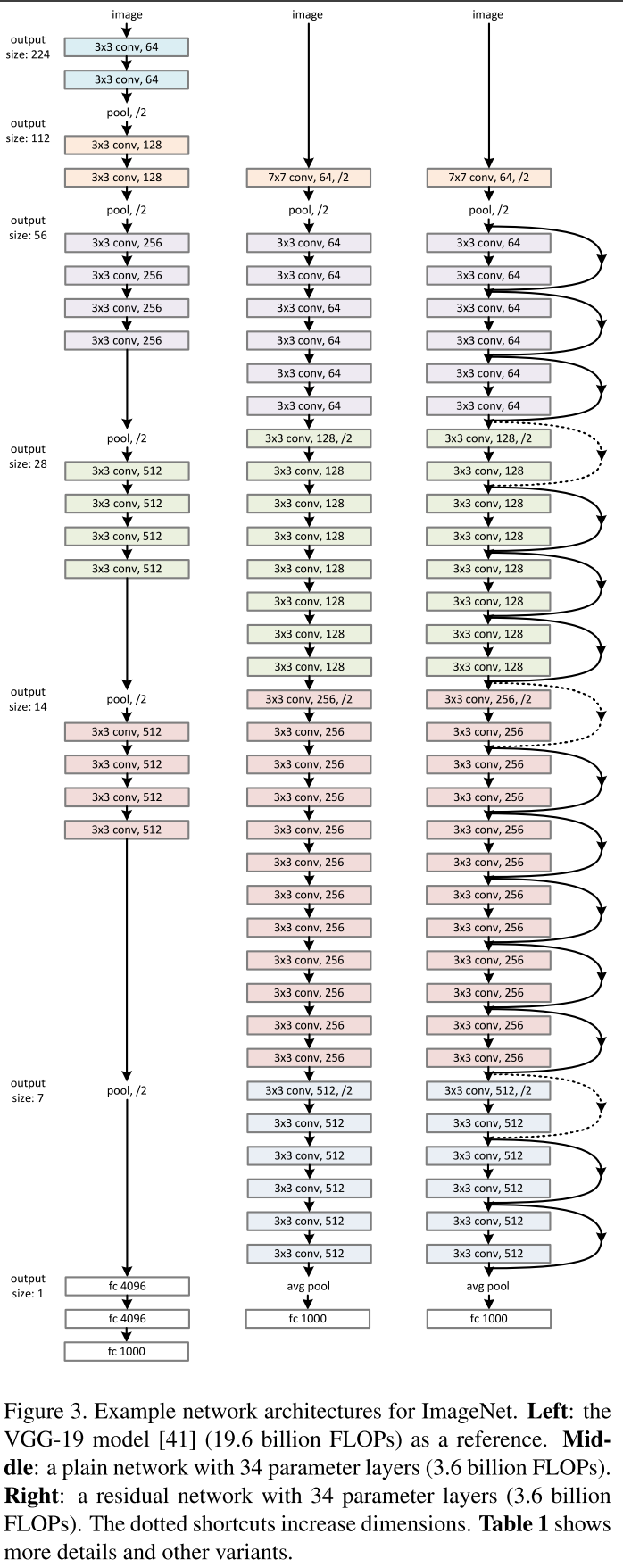
Very Deep Convolutional Networks for Large-Scale Image Recognition (12 Apr 2014)
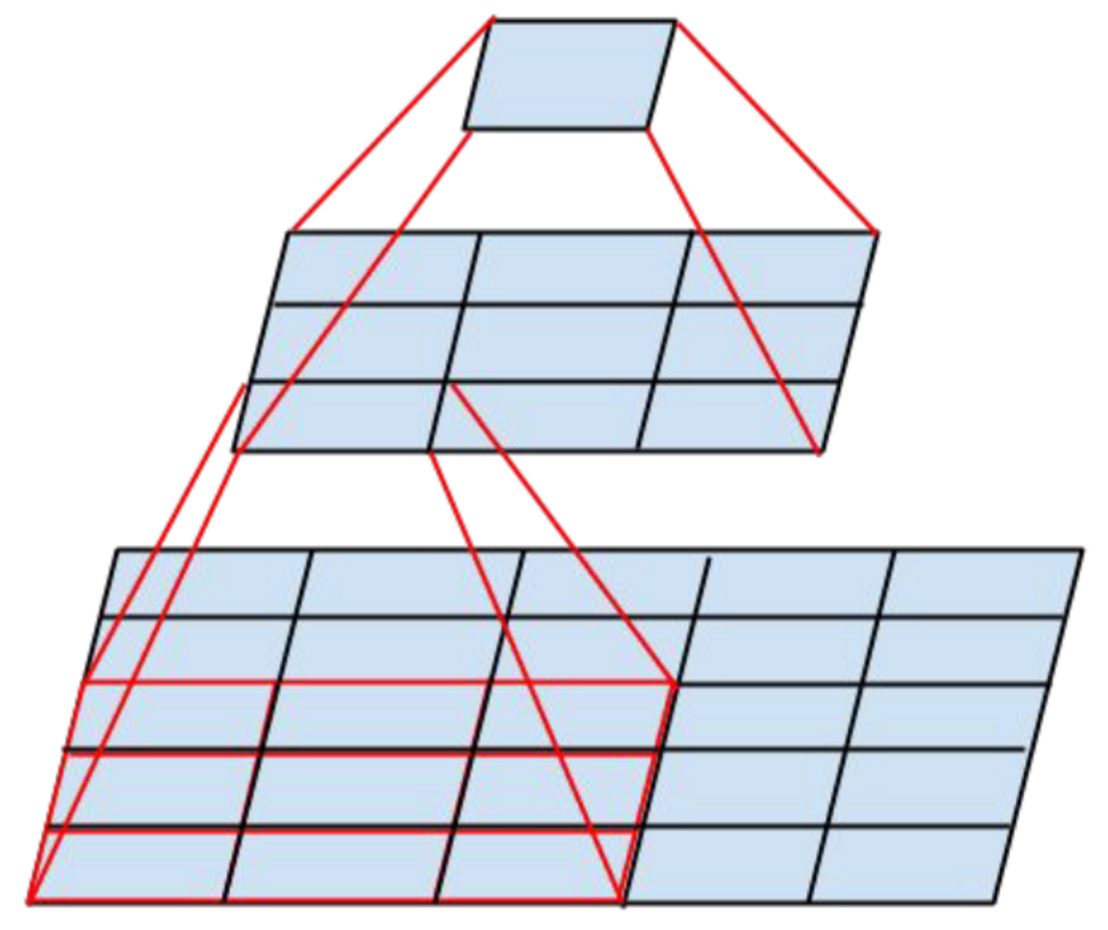
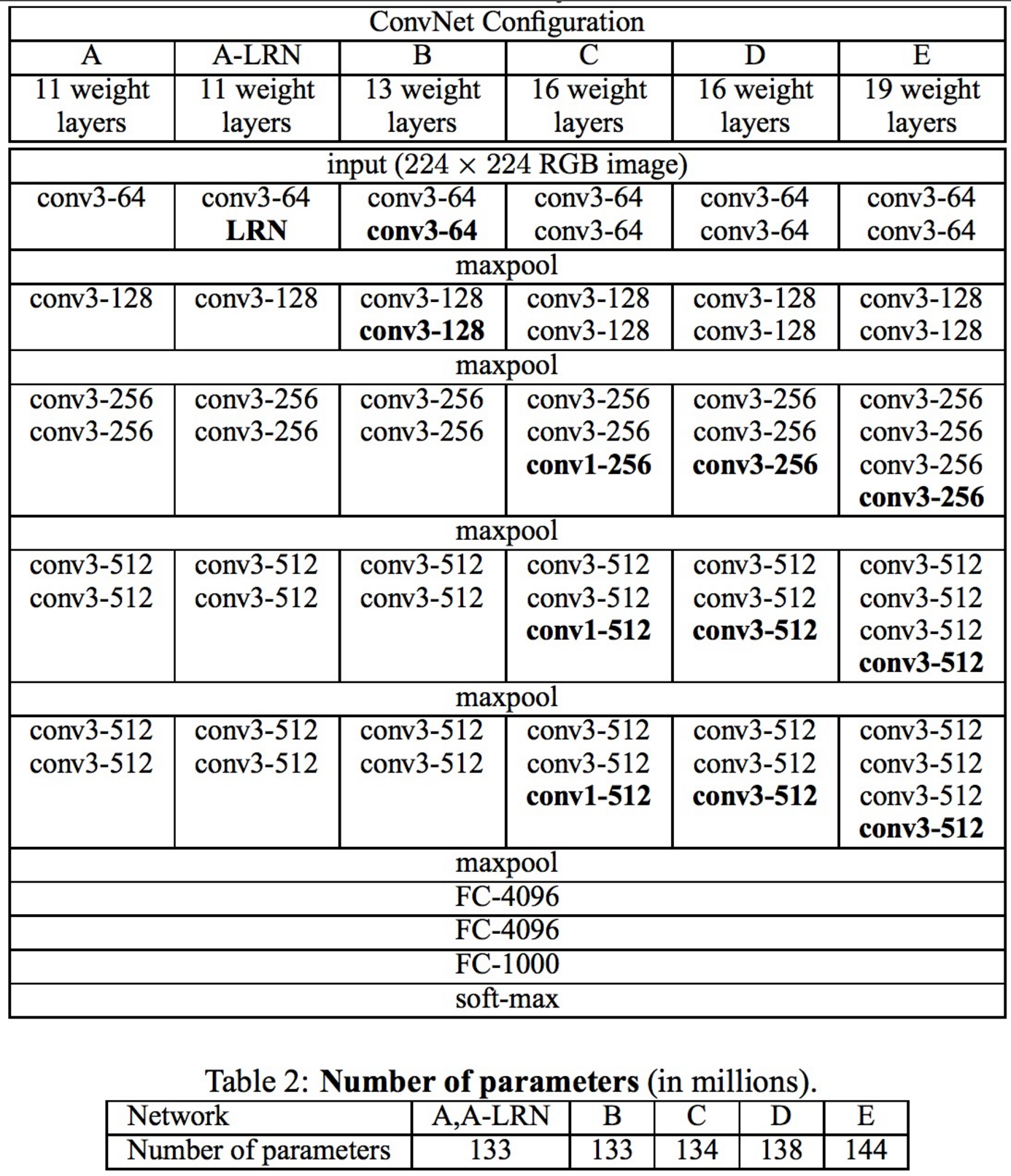
В этом году вышли две интересные статьи, эта и Google Inception, которую мы рассмотрим ниже. Работа же Оксфордской лаборатории — это последняя работа, придерживающаяся паттерна топологии, заложенного ЛеКуном. Их модель VGG-19 состоит из 144 миллионов параметров и добавляет в архитектуру, помимо 84 миллионов параметров, еще одну простую идею. Возьмем для примера свертку 5 ? 5, это отображение ![]() , оно содержит 25 параметров. Если заменить ее стеком из двух слоев со свертками 3 ? 3, то мы получим такое же отображение, но количество параметров будет меньше: 3 ? 3 + 3 ? 3 = 18, а это на 22 % меньше. Если же заменить 11 ? 11 на четыре свертки 3 ? 3, то это уже на 70 % меньше параметров.
, оно содержит 25 параметров. Если заменить ее стеком из двух слоев со свертками 3 ? 3, то мы получим такое же отображение, но количество параметров будет меньше: 3 ? 3 + 3 ? 3 = 18, а это на 22 % меньше. Если же заменить 11 ? 11 на четыре свертки 3 ? 3, то это уже на 70 % меньше параметров.
Network in Network (4 Mar 2014)
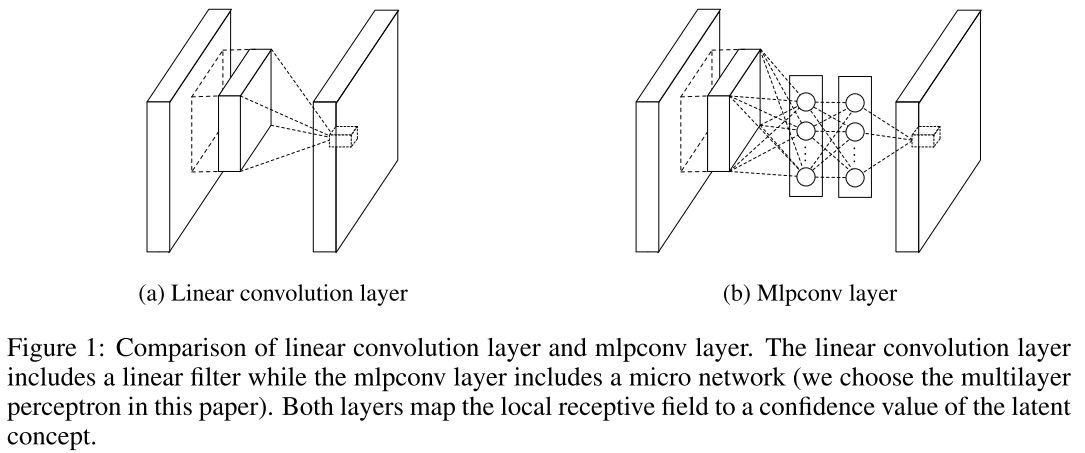
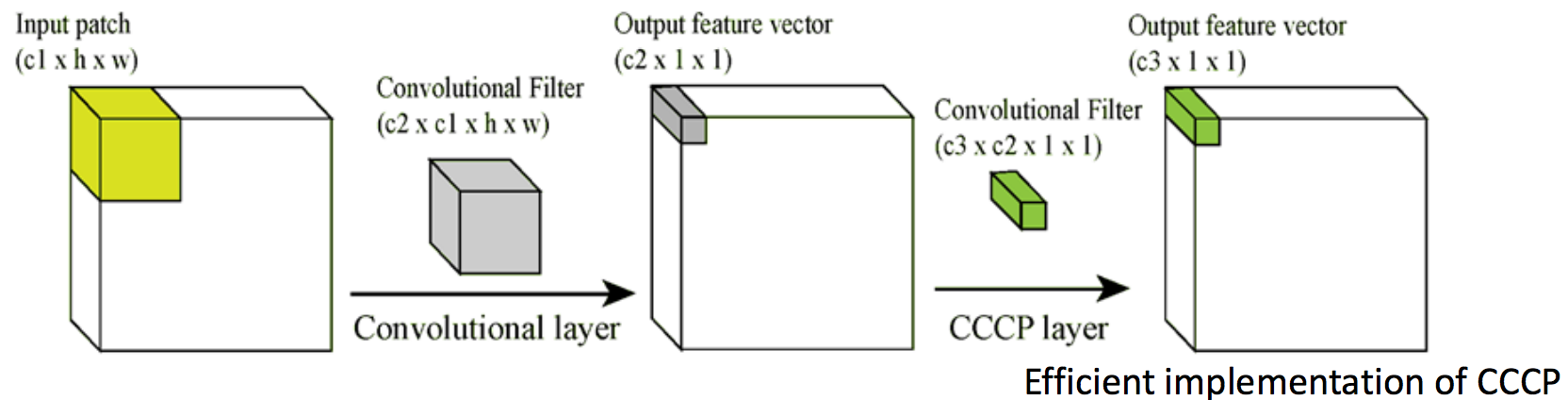
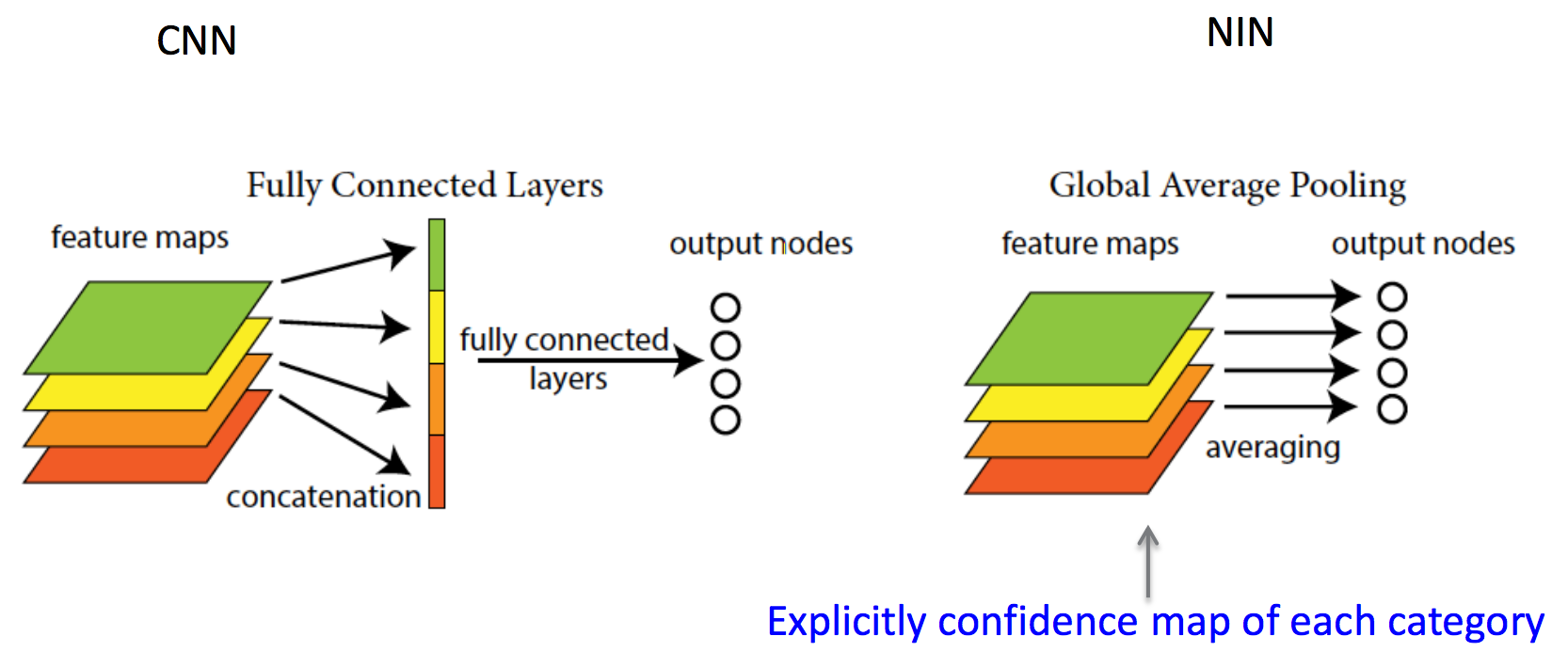
In Convolutional Nets, there is no such thing as «fully-connected layers». There are only convolution layers with 1 ? 1 convolution kernels and a full connection table.
Жаль только, что авторы, придумавшие столько новых идей, не участвовали в имаджнете. Зато Google вовремя подсуетился и использовал эти идеи в следующей публикации. В итоге гугл разделил призовые места 2014 года с командой из Оксфорда.
Going Deeper with Convolutions (17 Sep 2014)
In this paper, we will focus on an efficient deep neural network architecture for computer vision, codenamed Inception, which derives its name from the Network in network paper by Lin et al [12] in conjunction with the famous “we need to go deeper” internet meme [1]. In our case, the word “deep” is used in two different meanings: first of all, in the sense that we introduce a new level of organization in the form of the “Inception module” and also in the more direct sense of increased network depth. In general, one can view the Inception model as a logical culmination of [12] while taking inspiration and guidance from the theoretical work by Arora et al [2].
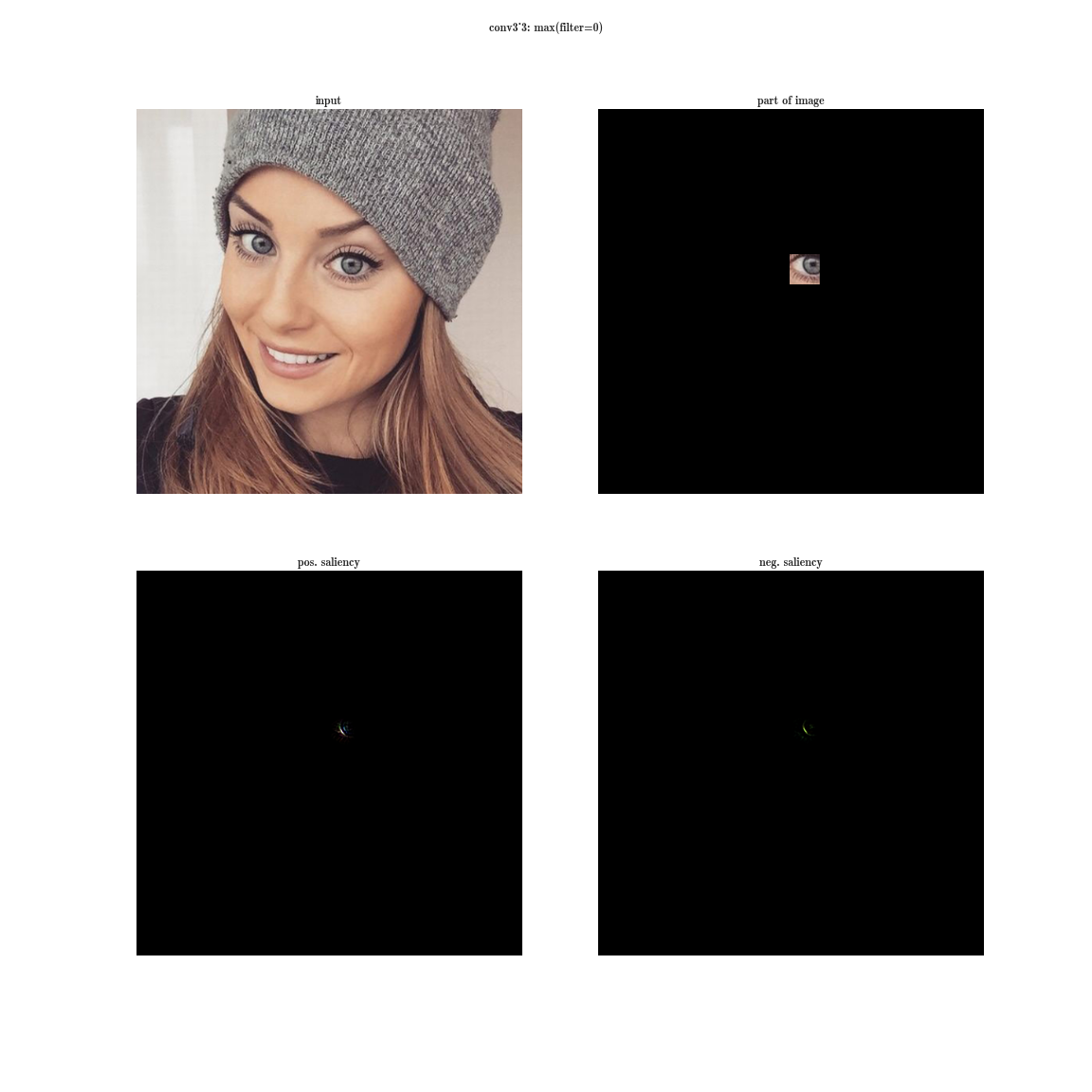
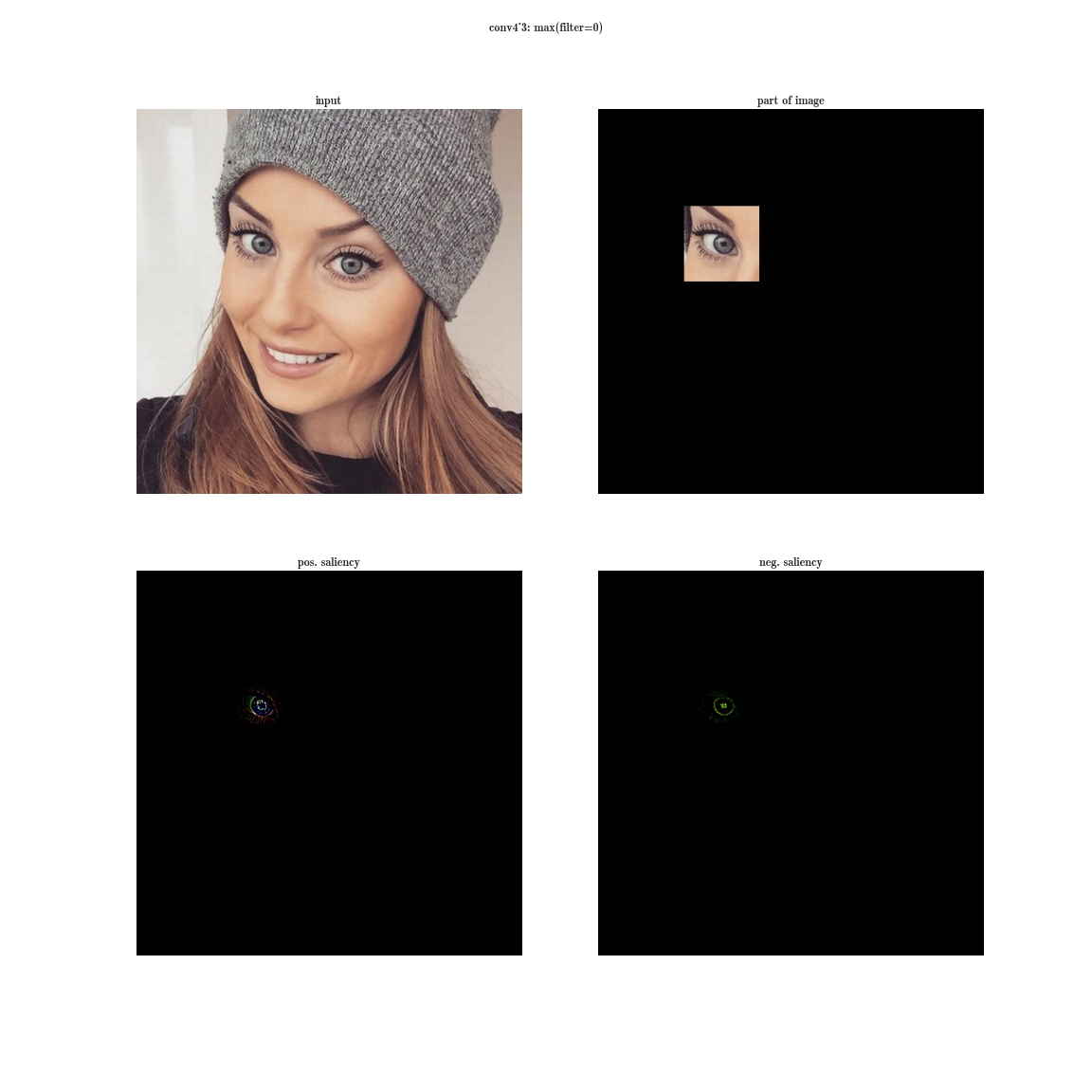
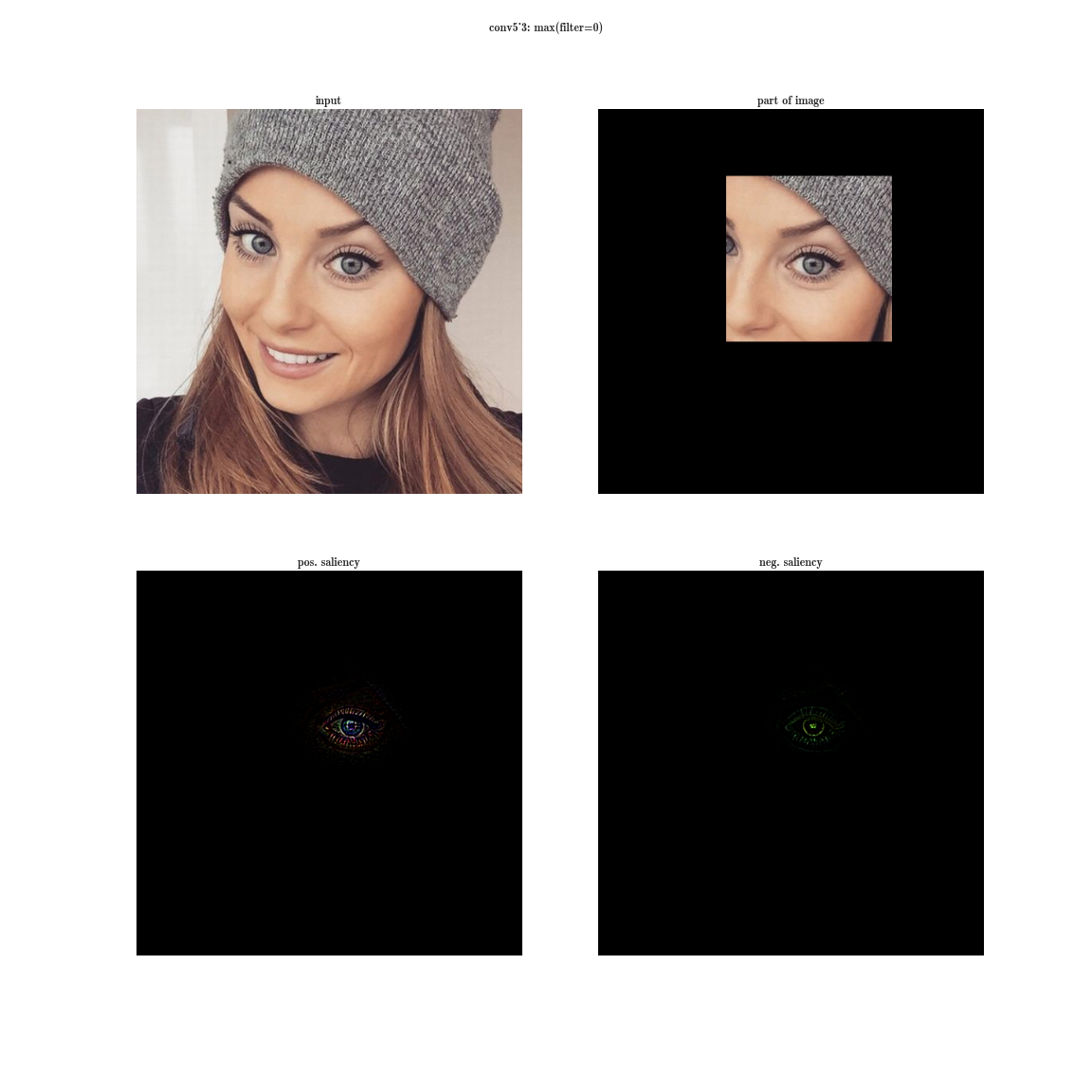
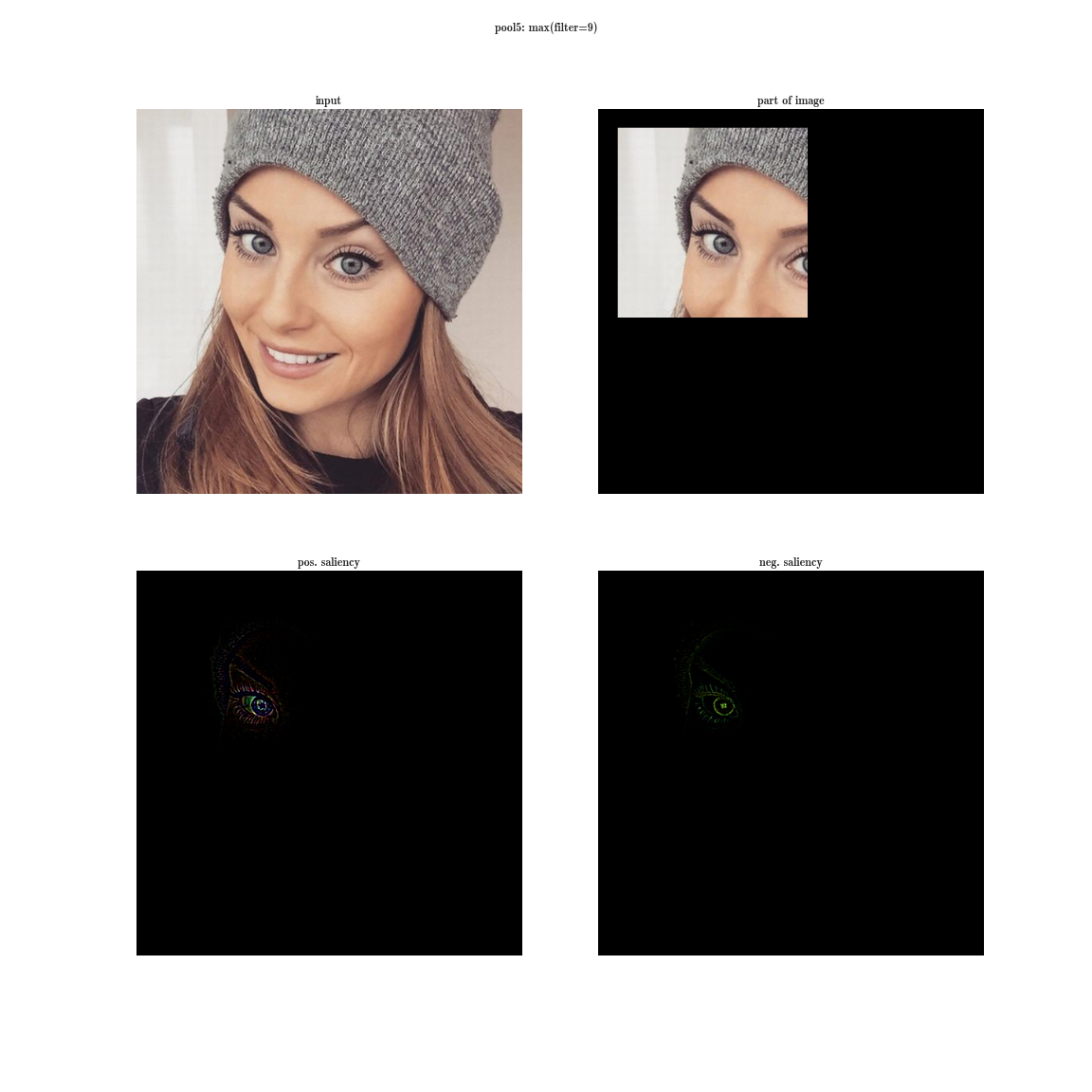
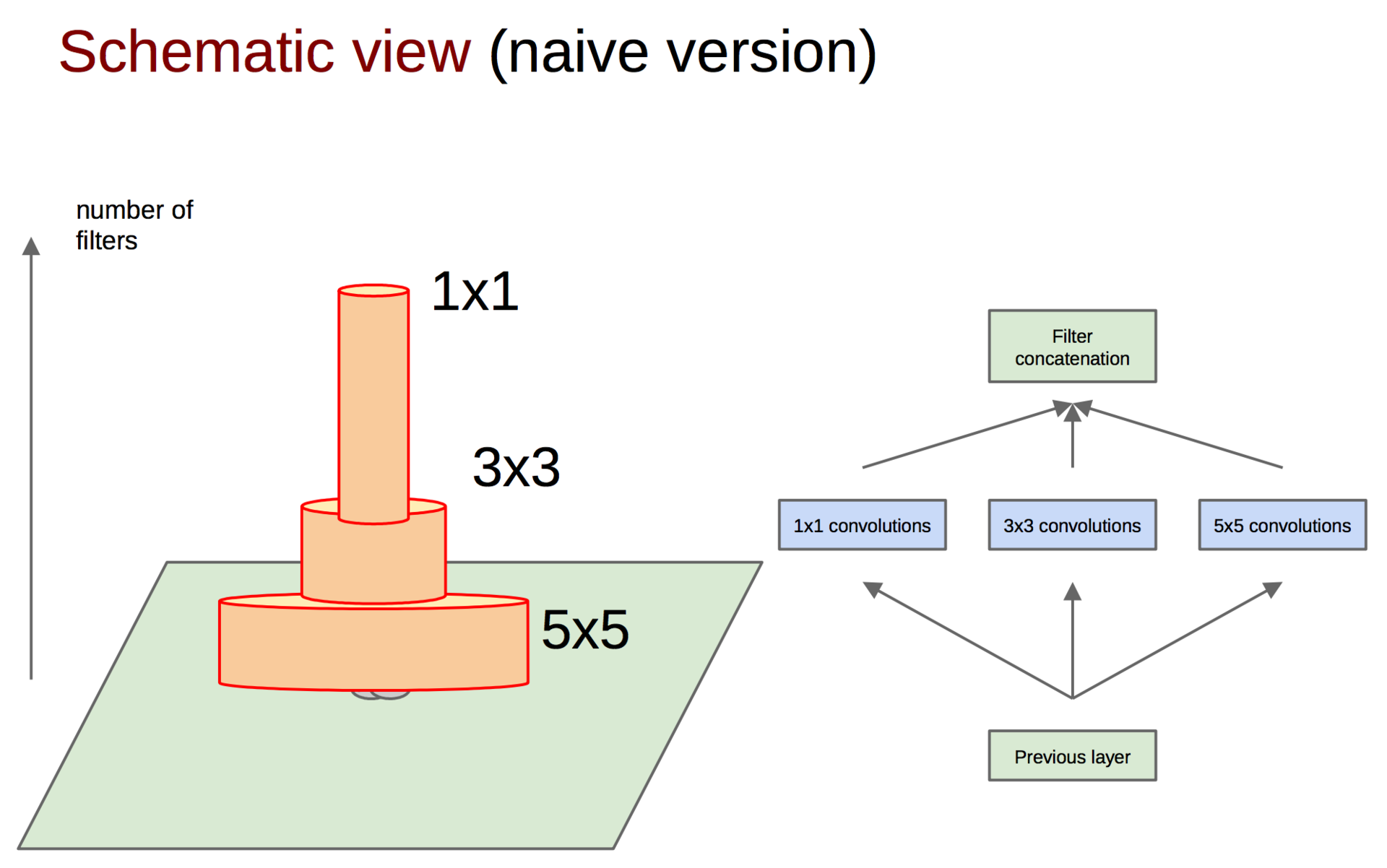
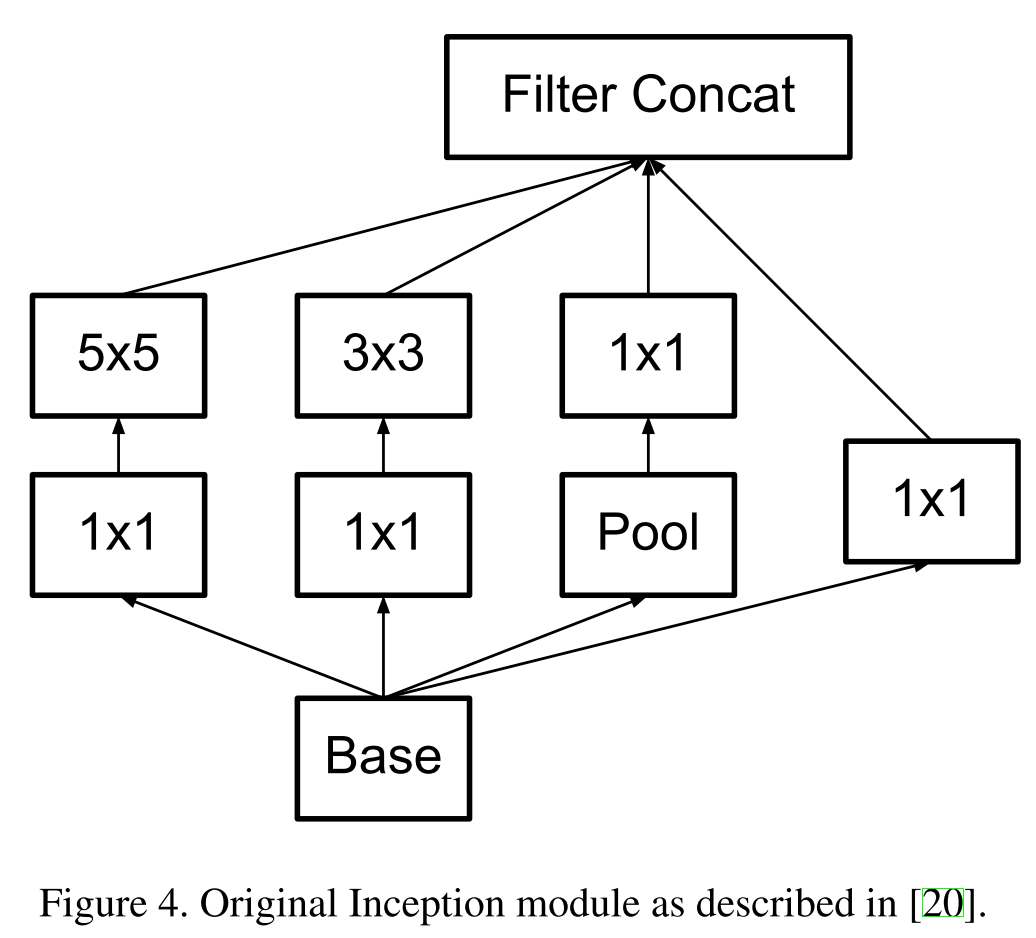
Произвольное увеличение ширины (количество нейронов в слоях) и глубины (количество слоев) имеет ряд недостатков. Во-первых, увеличение количества параметров способствует переобучению, а увеличение количества слоев добавляет еще и проблему затухания градиента. Кстати, последнее утверждение разрешится ResNet’ом, о которой речь пойдет дальше. Во-вторых, увеличение количества сверток в слое приводит к квадратичному увеличению вычислений в этом слое. Если же новые параметры модели используются неэффективно, например многие из них становятся близки к нулю, тогда мы просто впустую тратим вычислительные мощности. Несмотря на эти проблемы, первый автор статьи хотел поэкспериментировать с глубокими сетями, но со значительно меньшим количеством параметров. Для этого он обратился к статье «Provable Bounds for Learning Some Deep Representations», в которой доказывают, что если вероятностное распределение данных можно представить в виде разреженной, глубокой и широкой нейронной сети, тогда можно построить оптимальную нейронную сеть для данного датасета, анализируя корреляции нейронов предыдущего слоя и объединяя коррелированные нейроны в группы, которые будут нейронами следующего слоя. Таким образом, нейроны поздних слоев «смотрят» на сильно пересекающиеся области исходного изображения. Напомню, как выглядят рецепторные области нейронов на разных уровнях и какие признаки они извлекают.
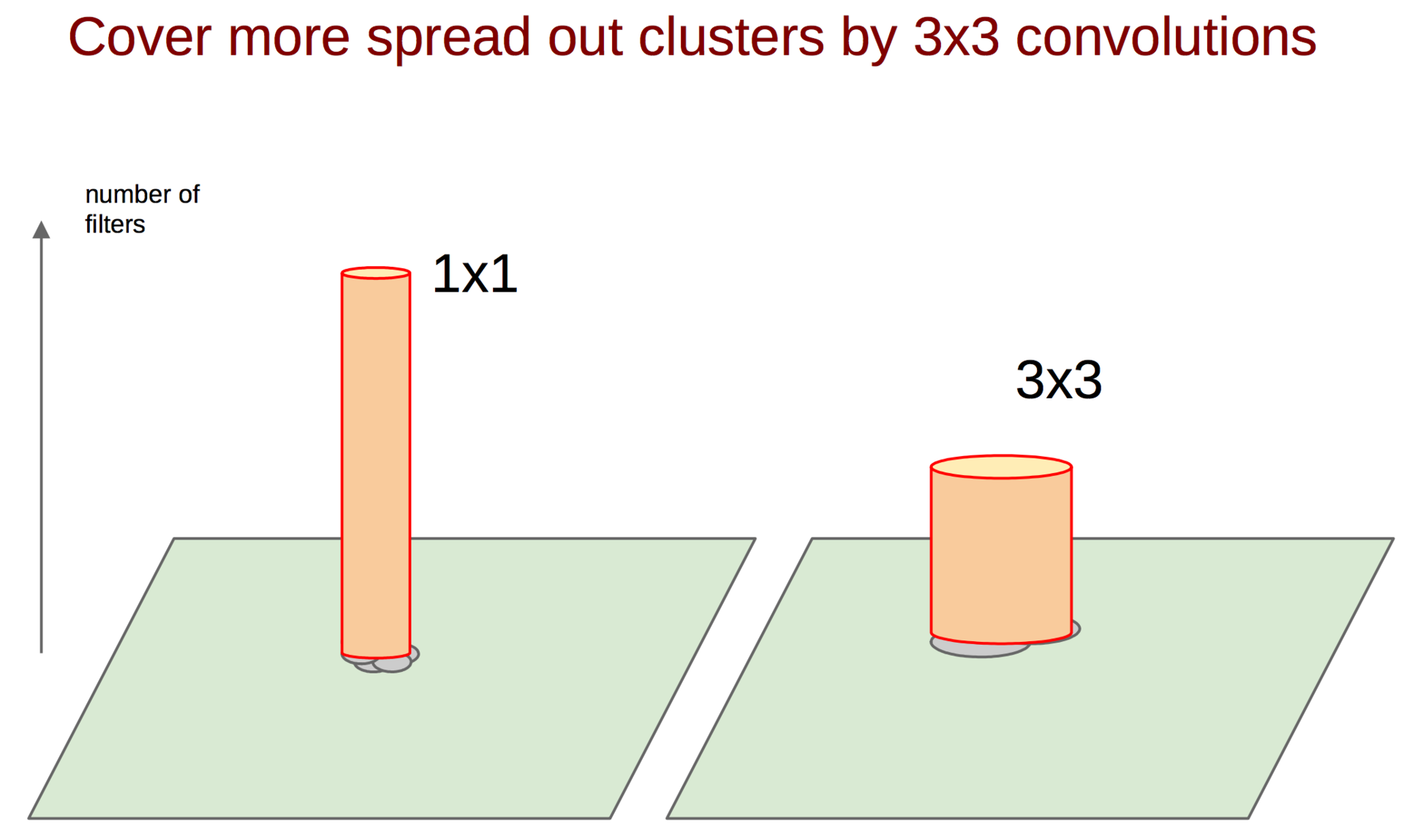
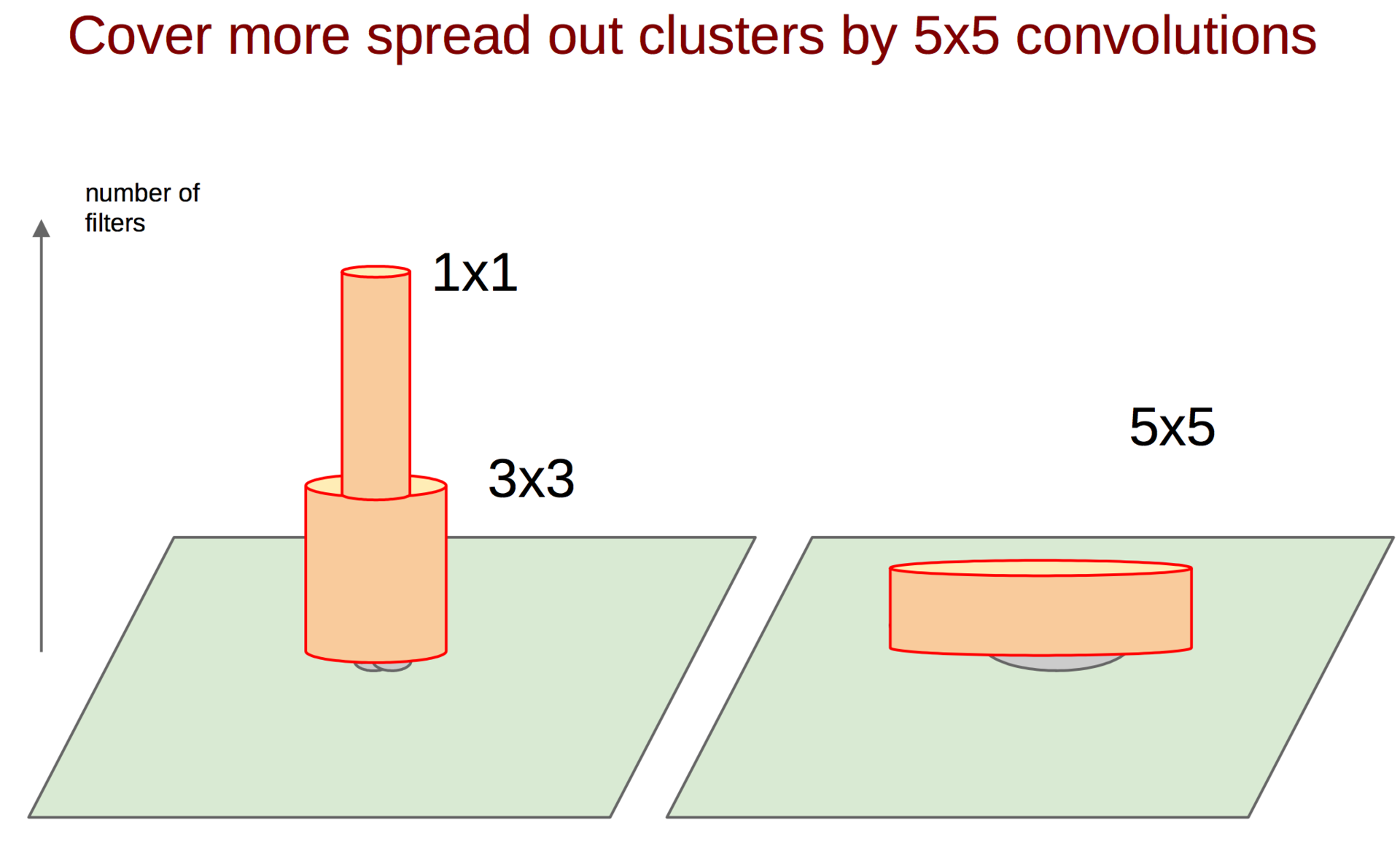
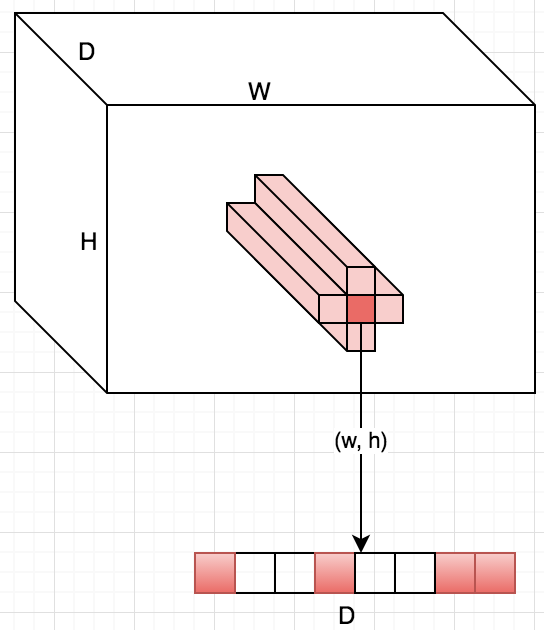 Каким же образом поймать такие корреляции и превратить их в один признак? На помощь приходит идея сверток 1 ? 1 из предыдущей работы. Продолжая эту идею, можно предположить, что чуть меньшее количество коррелированных кластеров будет чуть большего размера, например 3 ? 3. То же самое справедливо для 5 ? 5 и т. д., но гугл решил остановиться на 5 ? 5.
Каким же образом поймать такие корреляции и превратить их в один признак? На помощь приходит идея сверток 1 ? 1 из предыдущей работы. Продолжая эту идею, можно предположить, что чуть меньшее количество коррелированных кластеров будет чуть большего размера, например 3 ? 3. То же самое справедливо для 5 ? 5 и т. д., но гугл решил остановиться на 5 ? 5.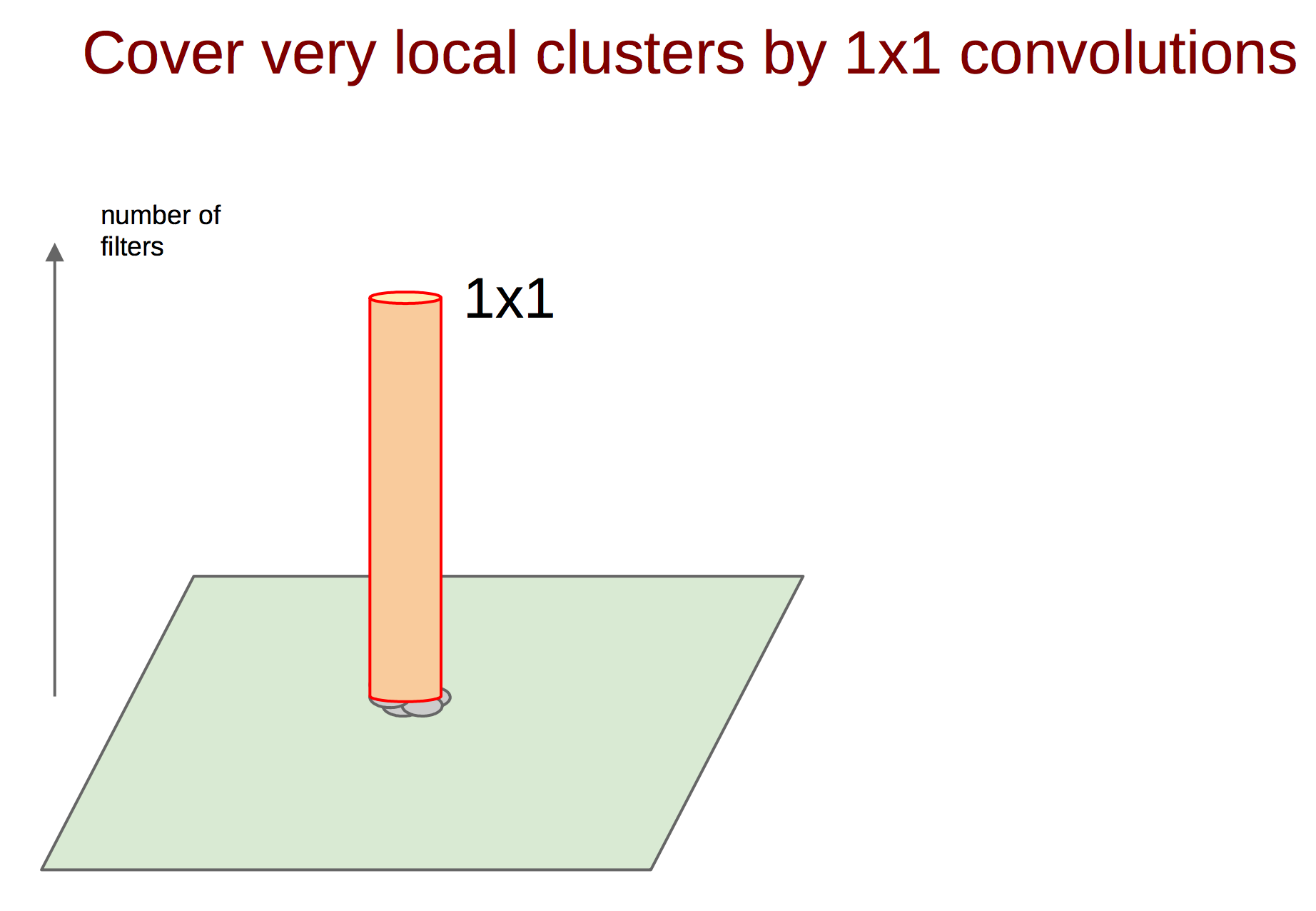
Additionally, since pooling operations have been essential for the success in current state of the art convolutional networks, it suggests that adding an alternative parallel pooling path in each such stage should have additional beneficial effect, too.
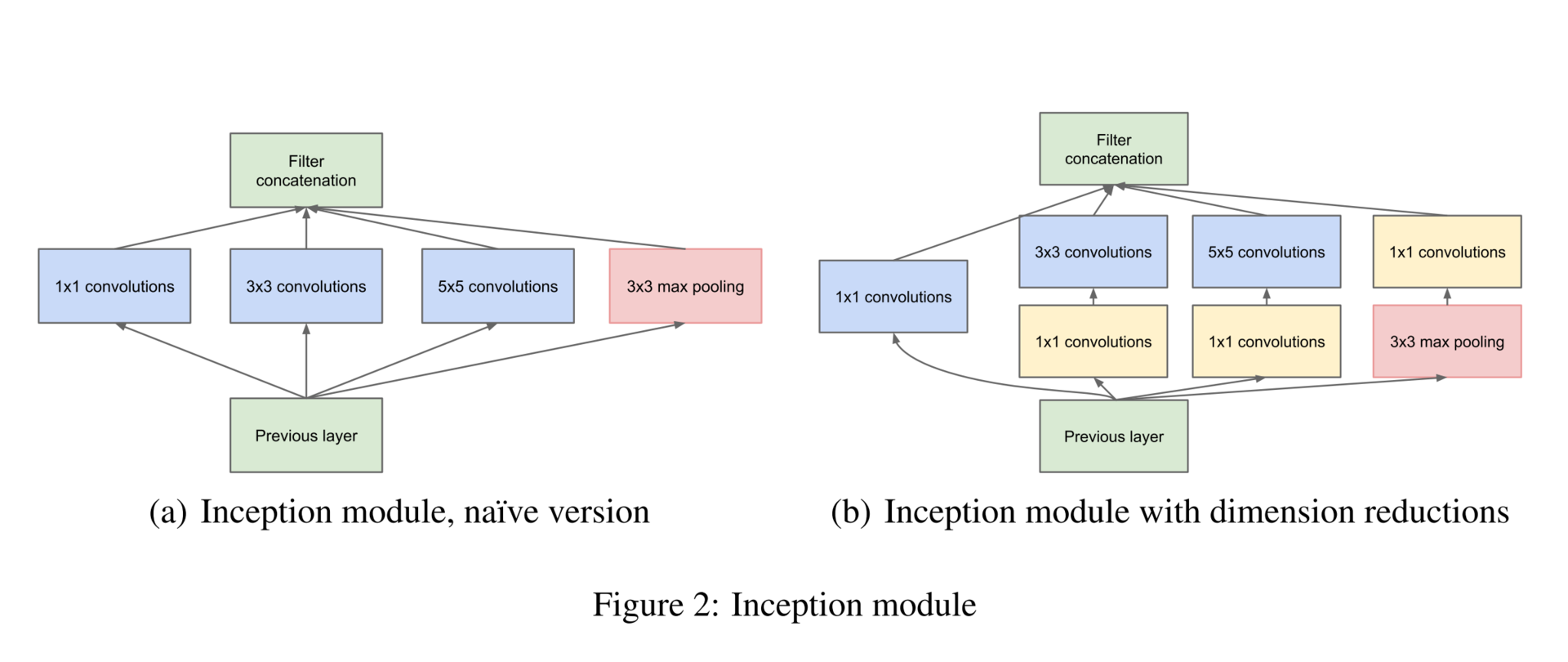
- увеличения размерности (после операции);
- уменьшения размерности (до операции);
- группировки коррелированных значений (первая операция в блоке).
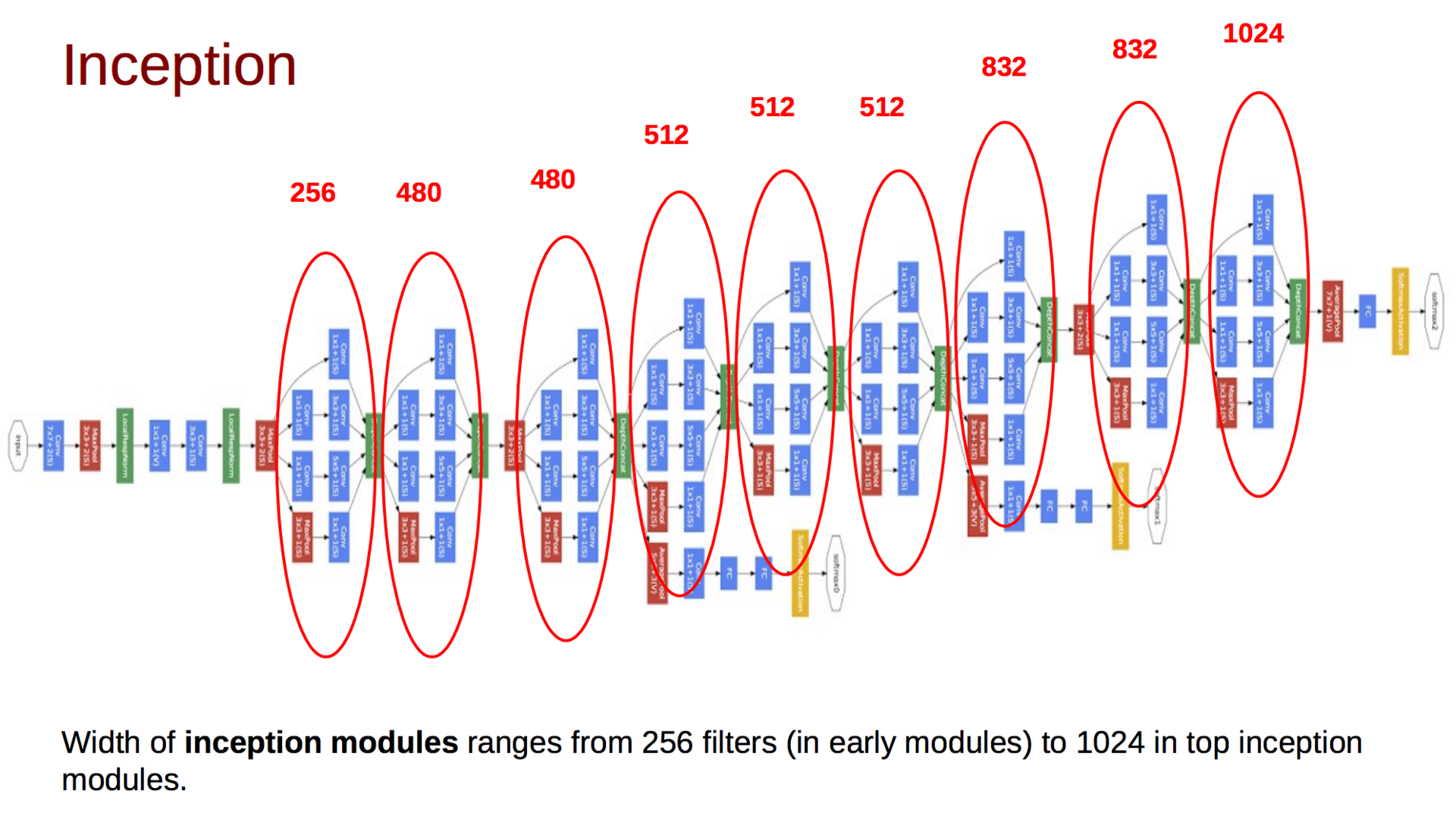
Итоговая модель выглядит следующим образом:
Rethinking the Inception Architecture for Computer Vision (11 Dec 2015)
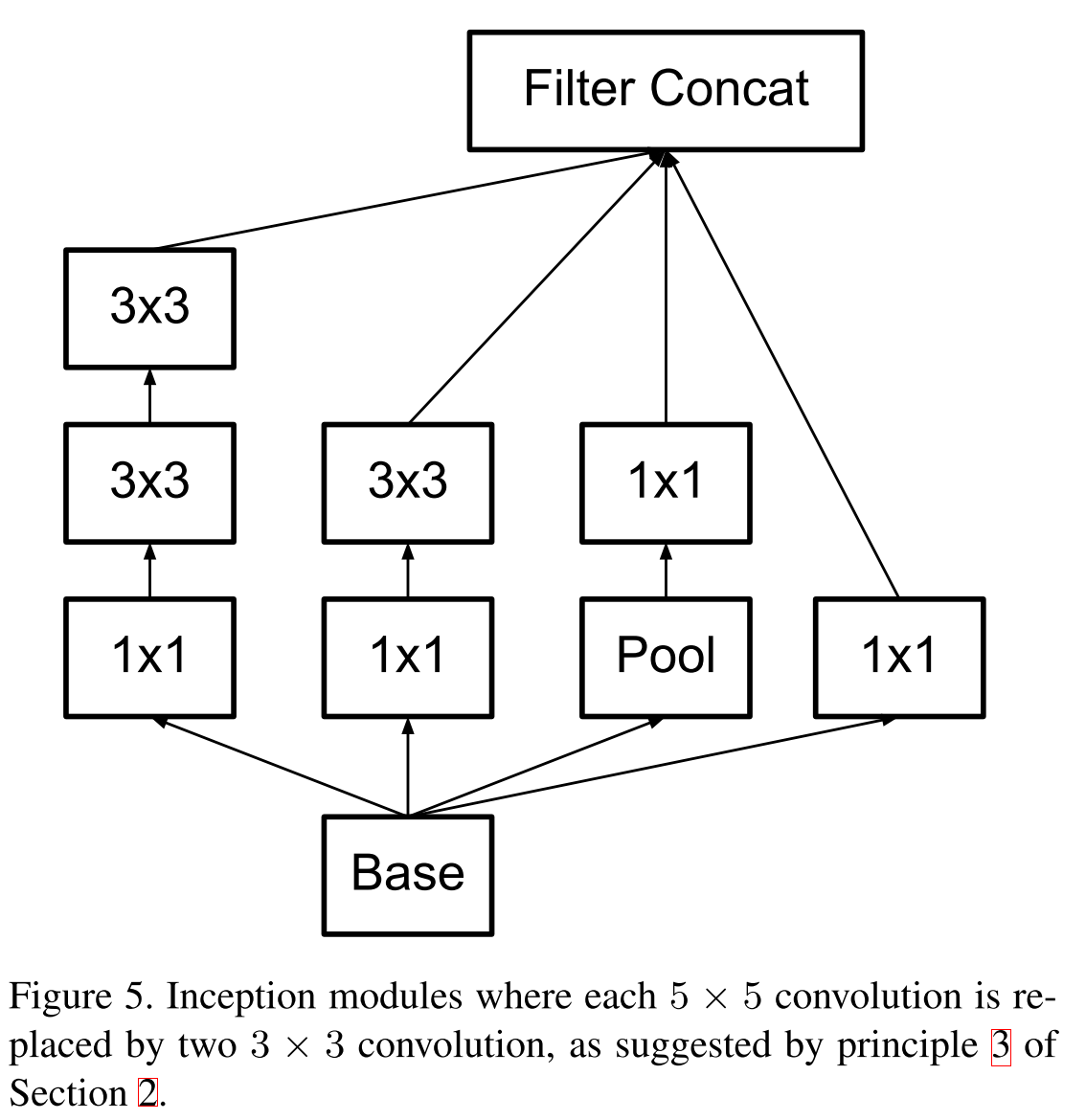
Спустя год гугл хорошо подготовился к имаджнету, переосмыслил архитектуру инсептрона, но проиграл совершенно новой модели, о которой пойдет речь в следующей части. В новой статье авторы исследовали на практике различные архитектуры и разработали четыре принципа построения глубоких сверточных нейронных сетей для компьютерного зрения:
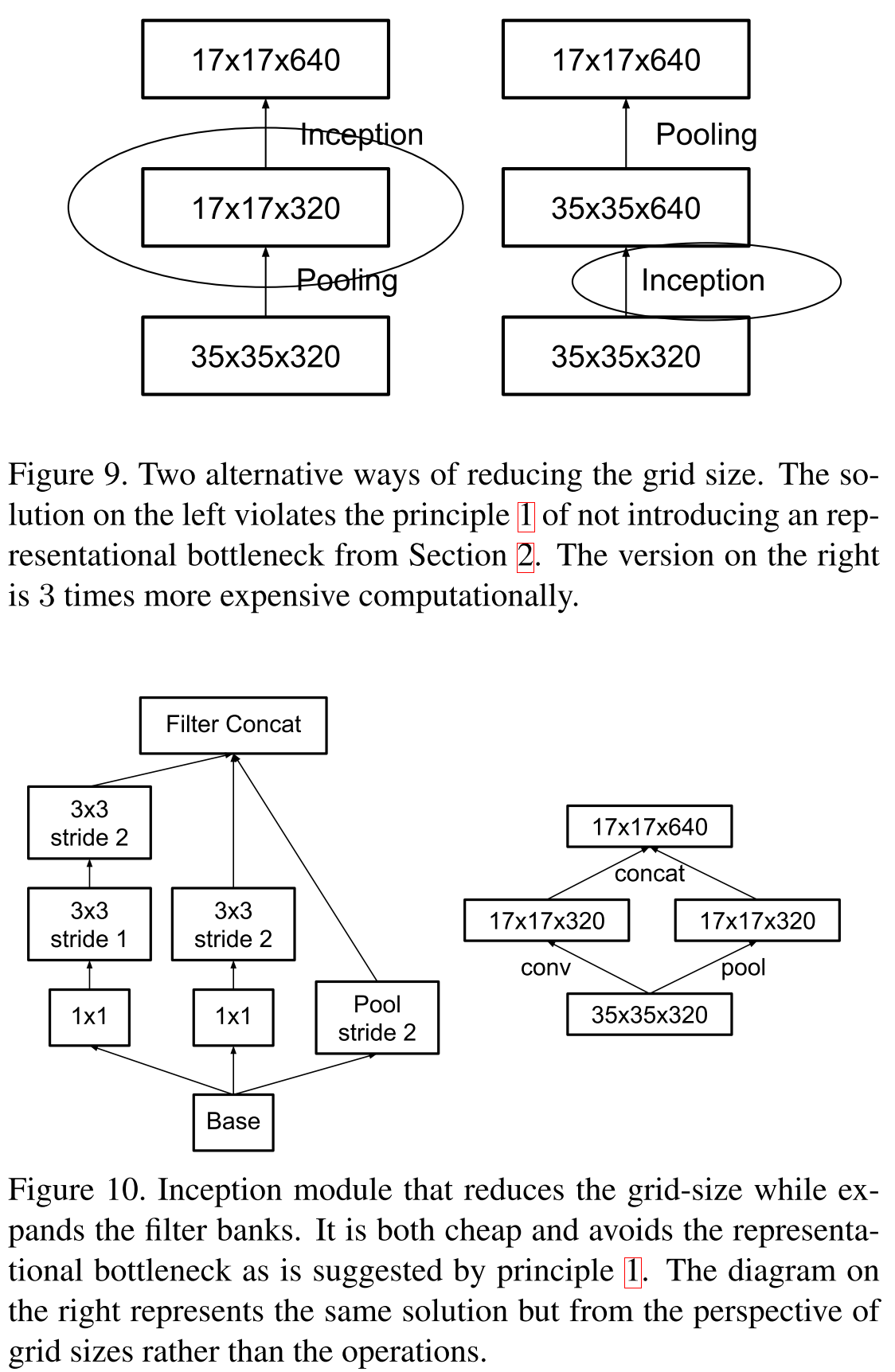
- Избегайте representational bottlenecks: не стоит резко снижать размерность представления данных, это нужно делать плавно от начала сети и до классификатора на выходе.
- Высокоразмерные представления следует обрабатывать локально, увеличивая размерность: недостаточно плавно снижать размерность, стоит использовать принципы, описанные в предыдущей статье, для анализа и группировки коррелированных участков.
- Пространственные сверки можно и нужно факторизовывать на еще более мелкие: это позволит сэкономить ресурсы и пустить их на увеличение размера сети.
- Необходимо соблюдать баланс между глубиной и шириной сети: не стоит резко увеличивать глубину сети отдельно от ширины, и наоборот; следует равномерно увеличивать или уменьшать обе размерности.
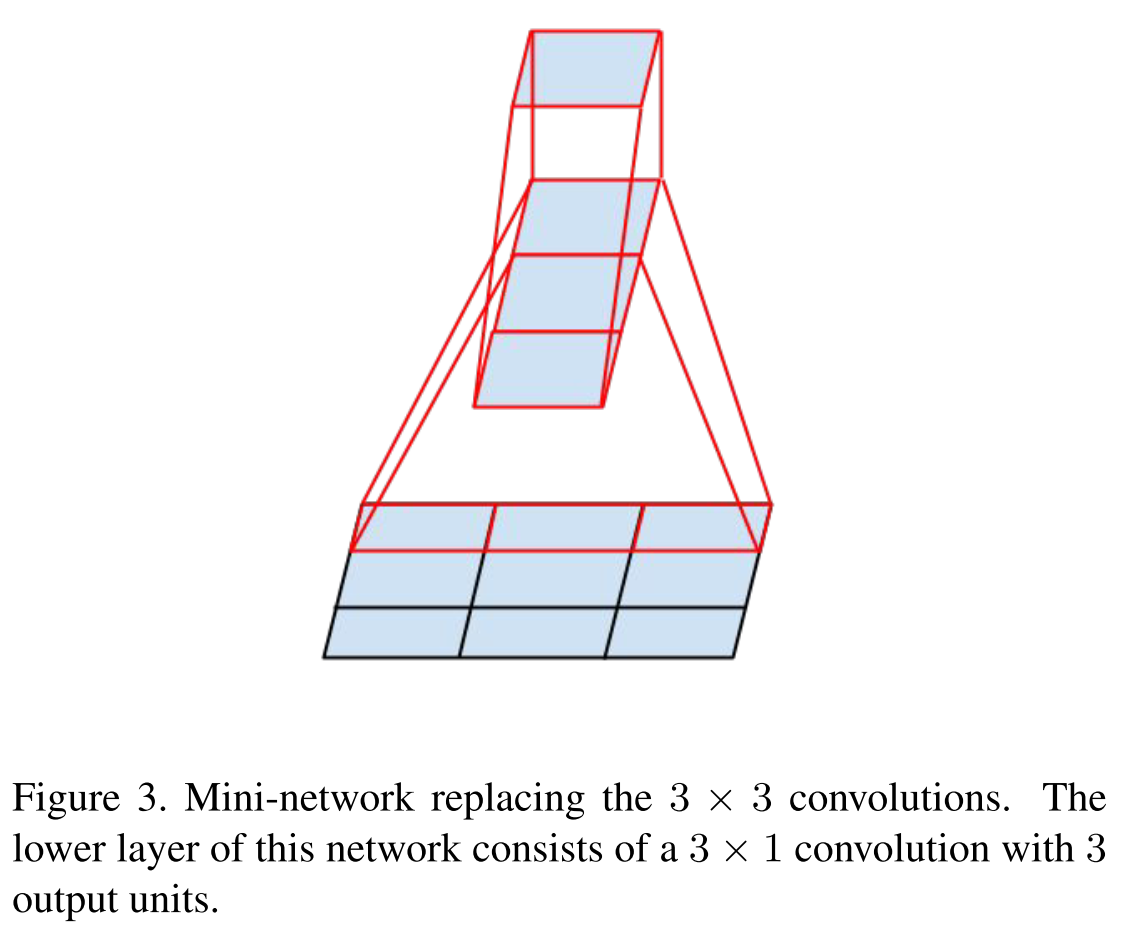
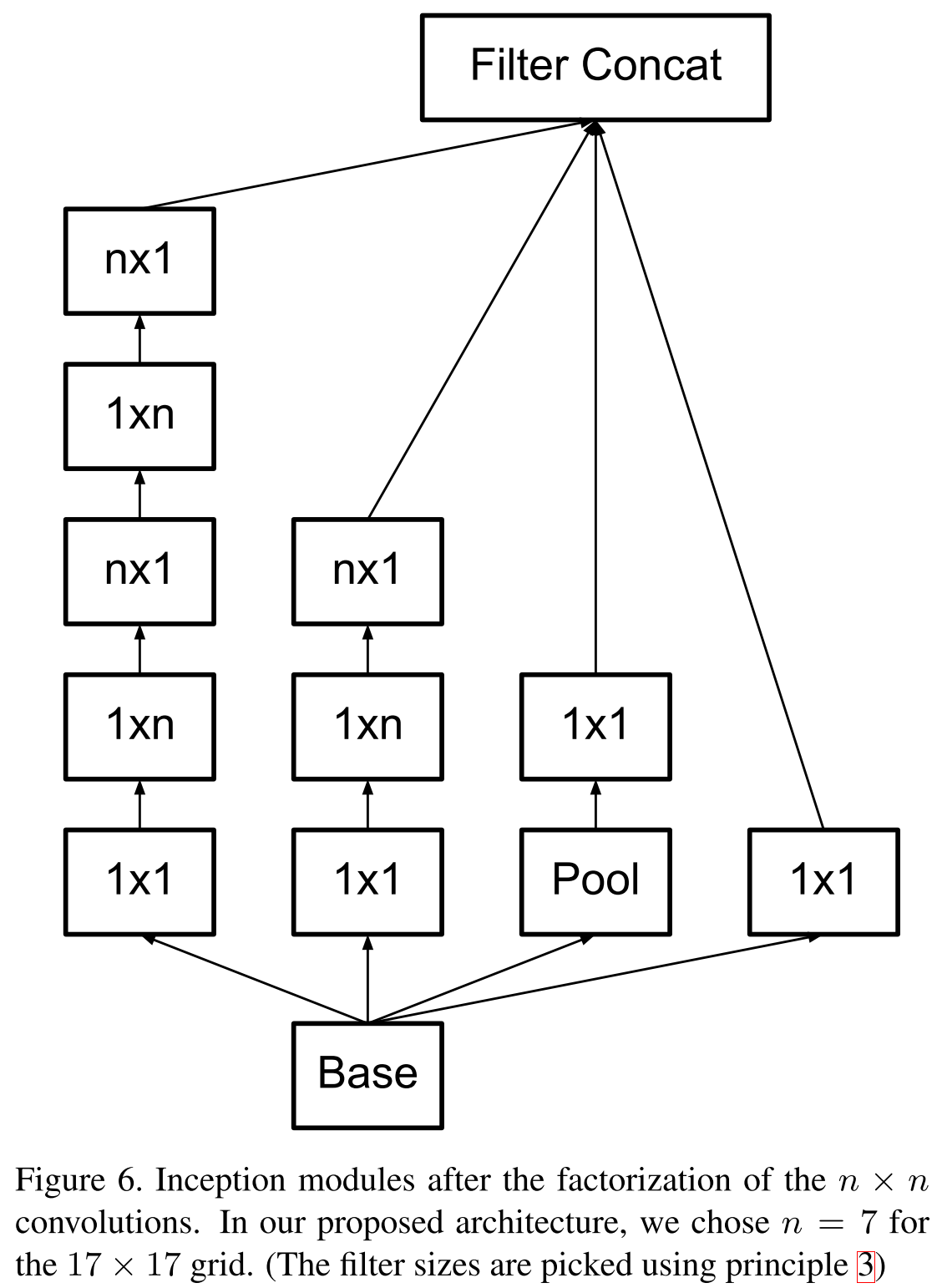
Помните идею VGG в 2014 году, что свертки большего размера можно факторизовать в стек сверток 3 ? 3? Так вот, гугл пошел еще дальше и факторизовал все свертки в N ? 1 и 1 ? N.
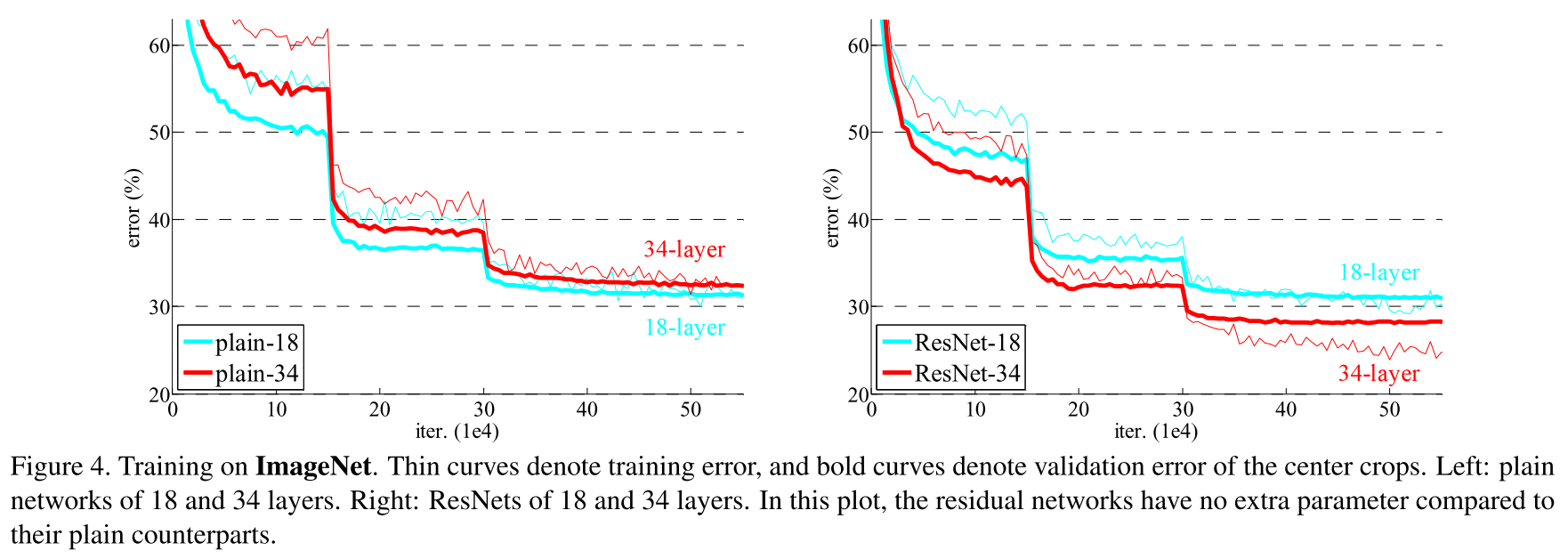
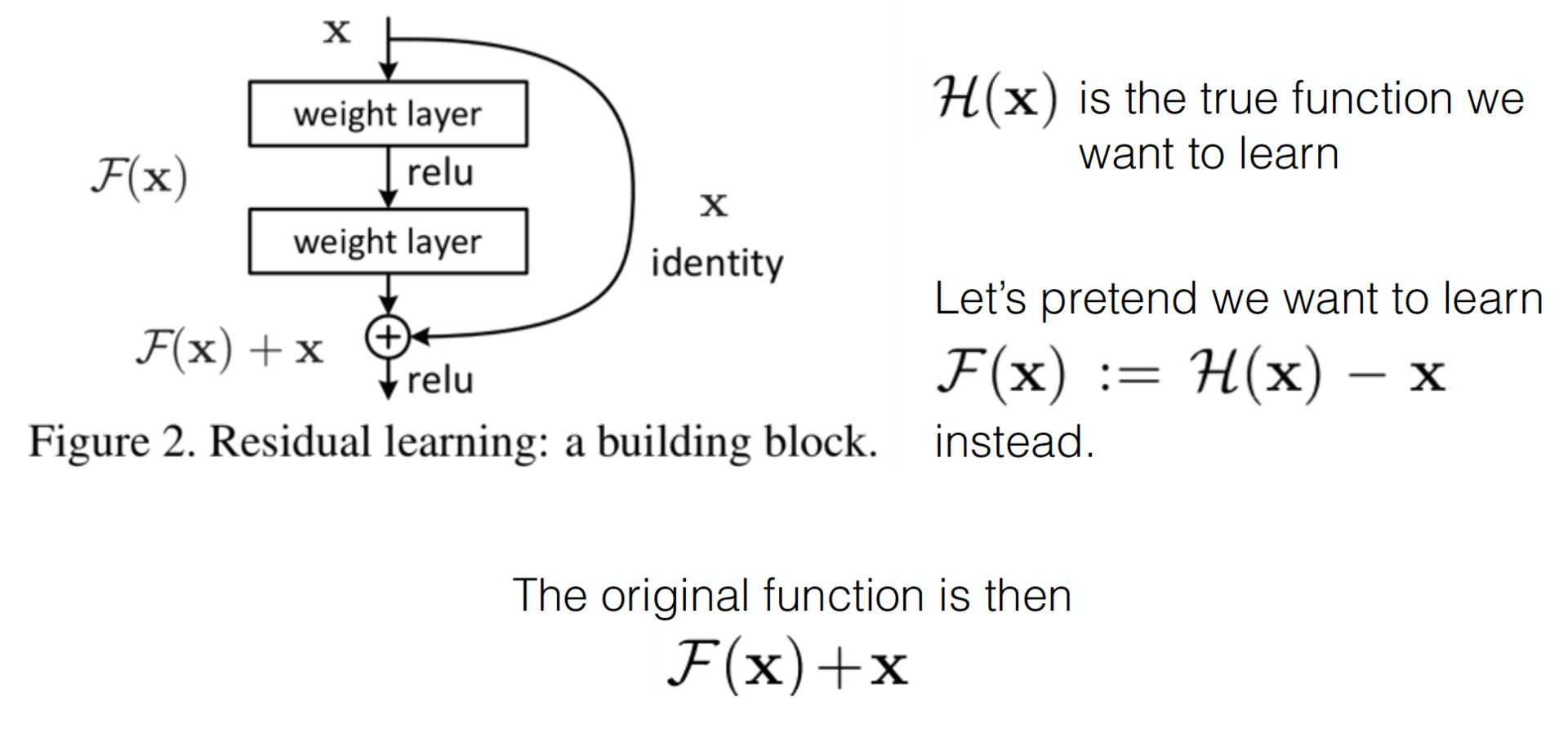
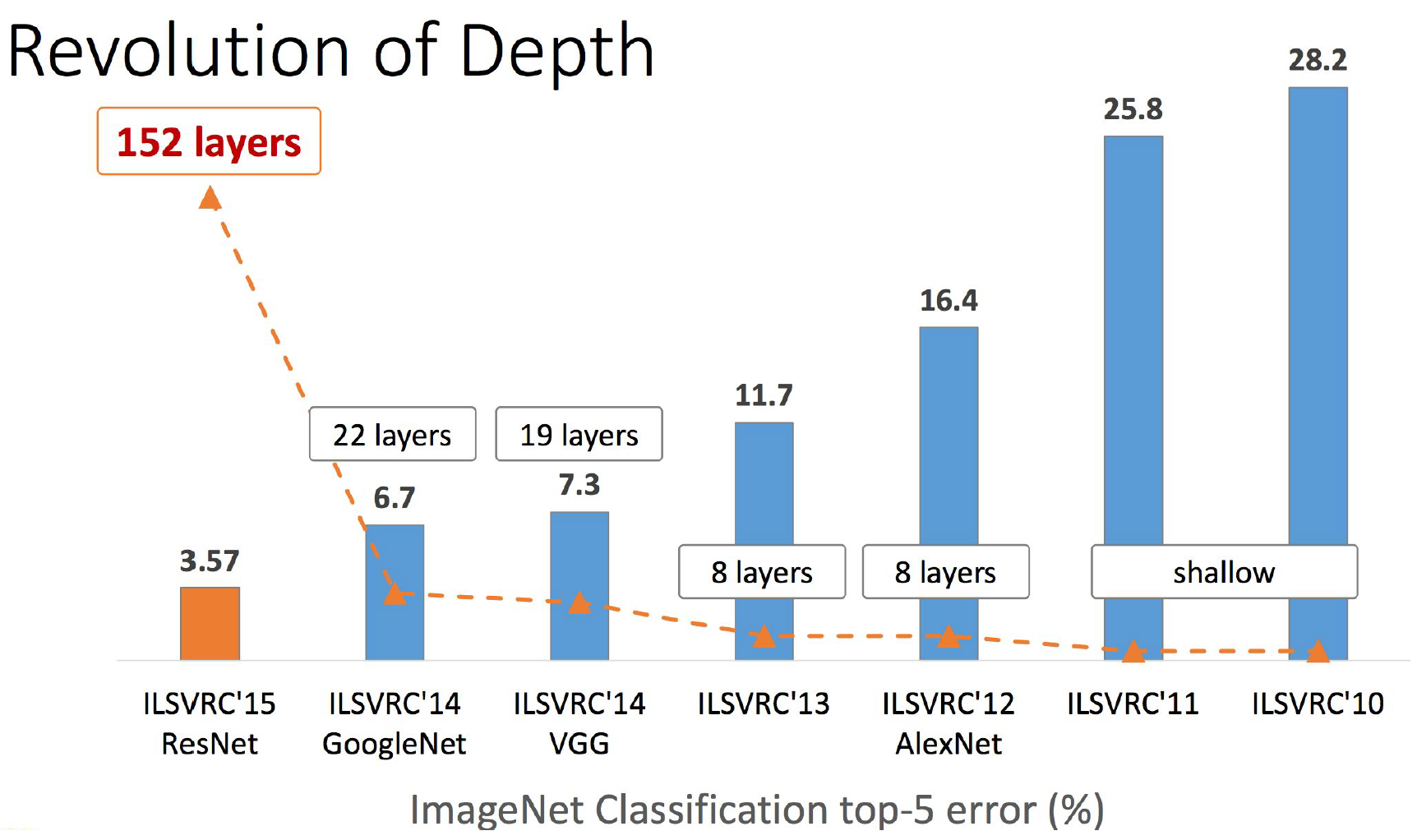
Deep Residual Learning for Image Recognition (10 Dec 2015)
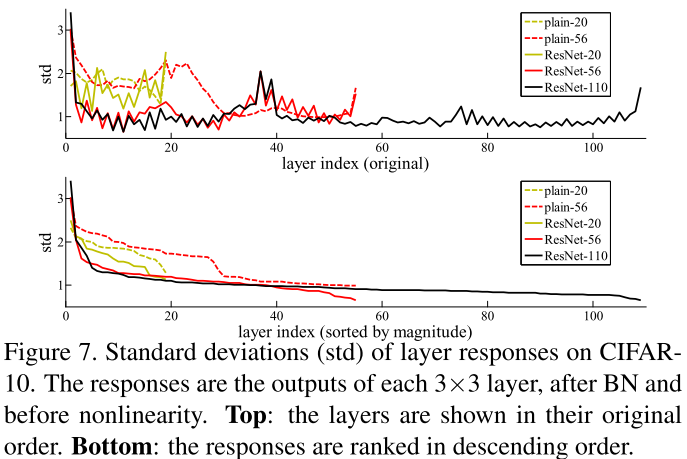
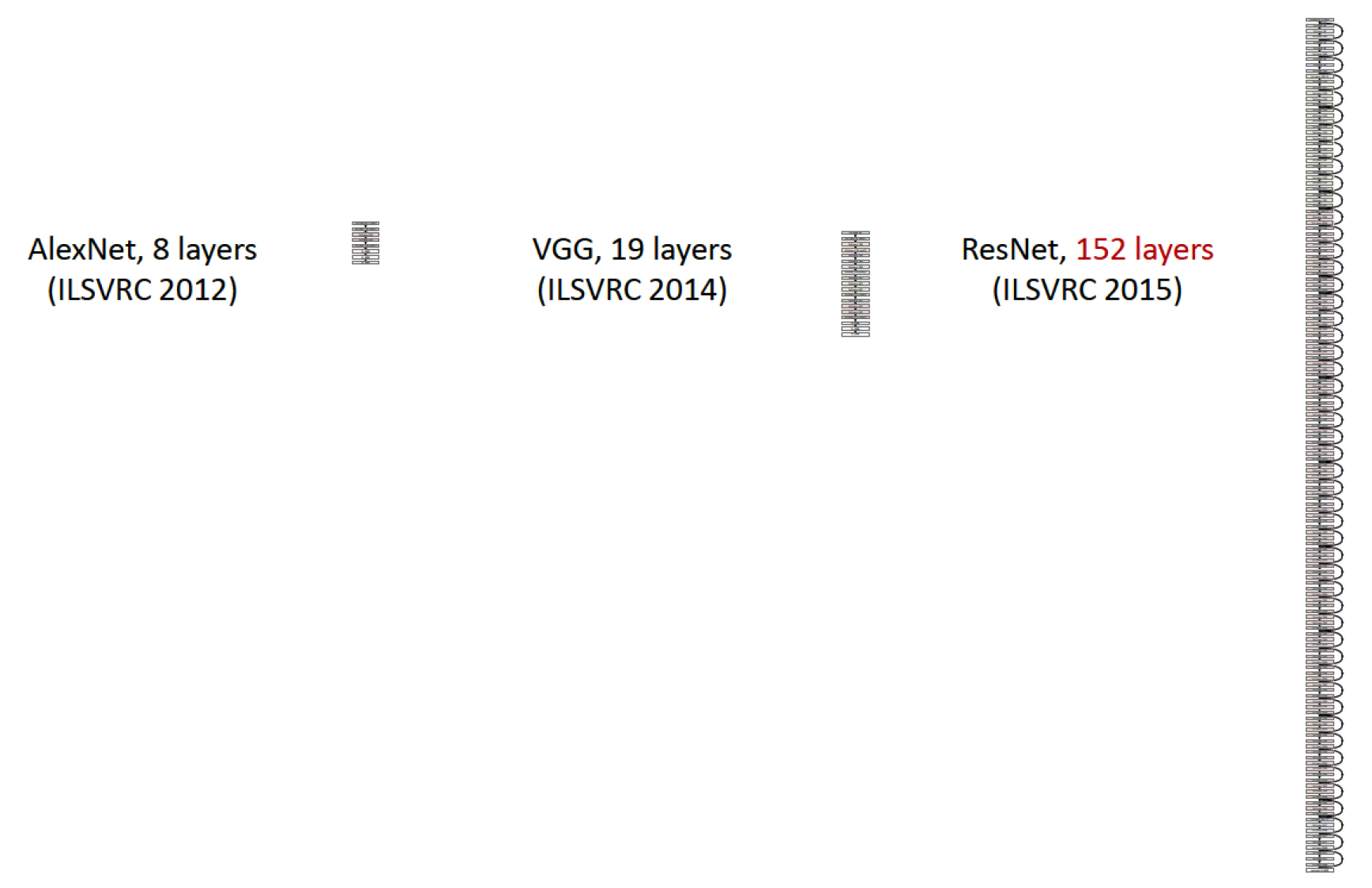
Пришло время изучить работу китайского подразделения Microsoft Research, которому проиграл гугл в 2015 году. Давно было замечено, что если просто стекать больше слоев, то качество такой модели растет до некоторого предела (смотрите VGG-19), а затем начинает падать. Эту проблему называют degradation problem, а сети, полученные стеканием большего количества слоев, — plain, или плоские сети. Авторы смогли найти такую топологию, при которой качество модели растет при добавлении новых слоев.
- ResNet-56
- ResNet-50
Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning (23 Feb 2016)
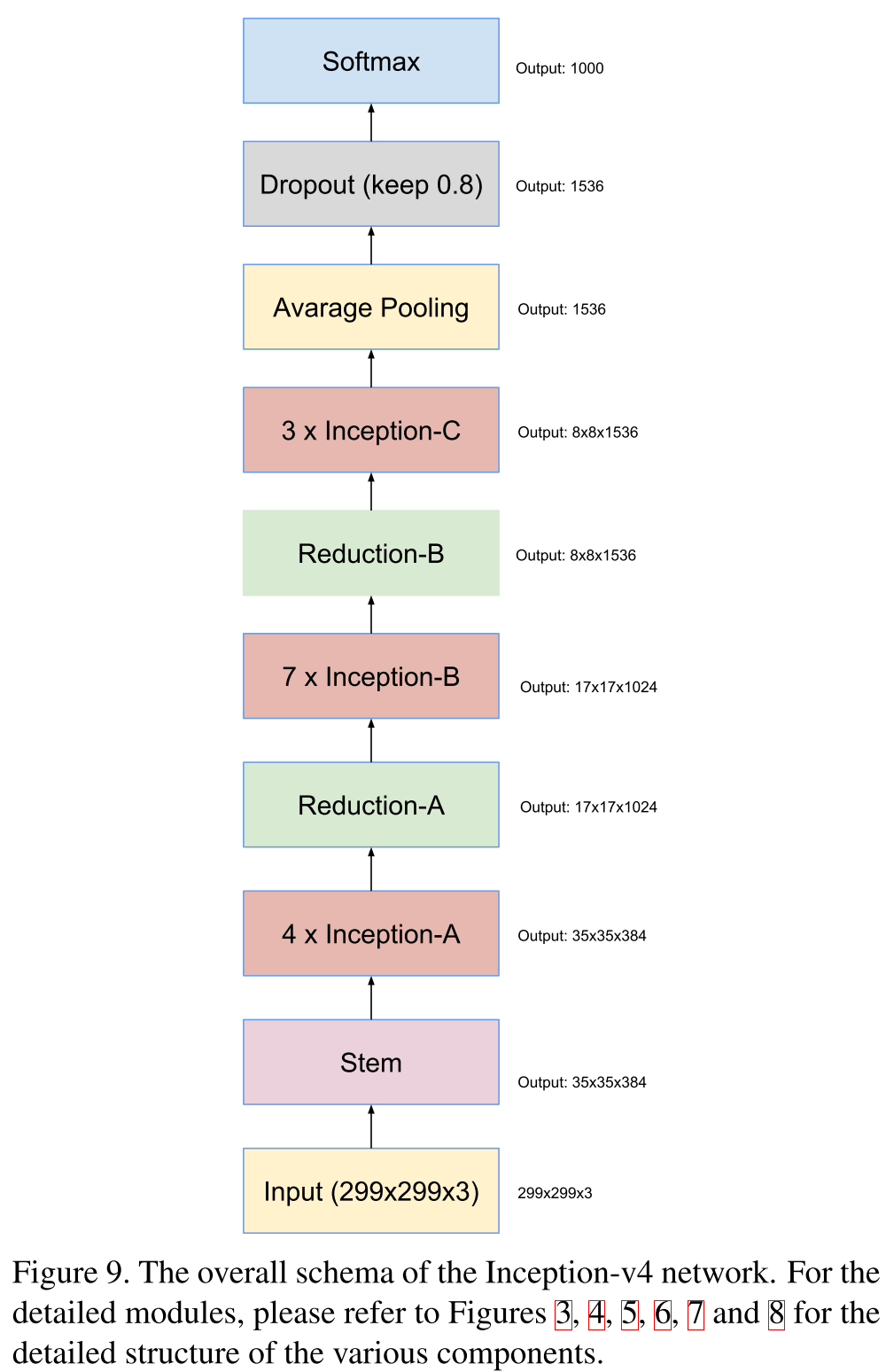
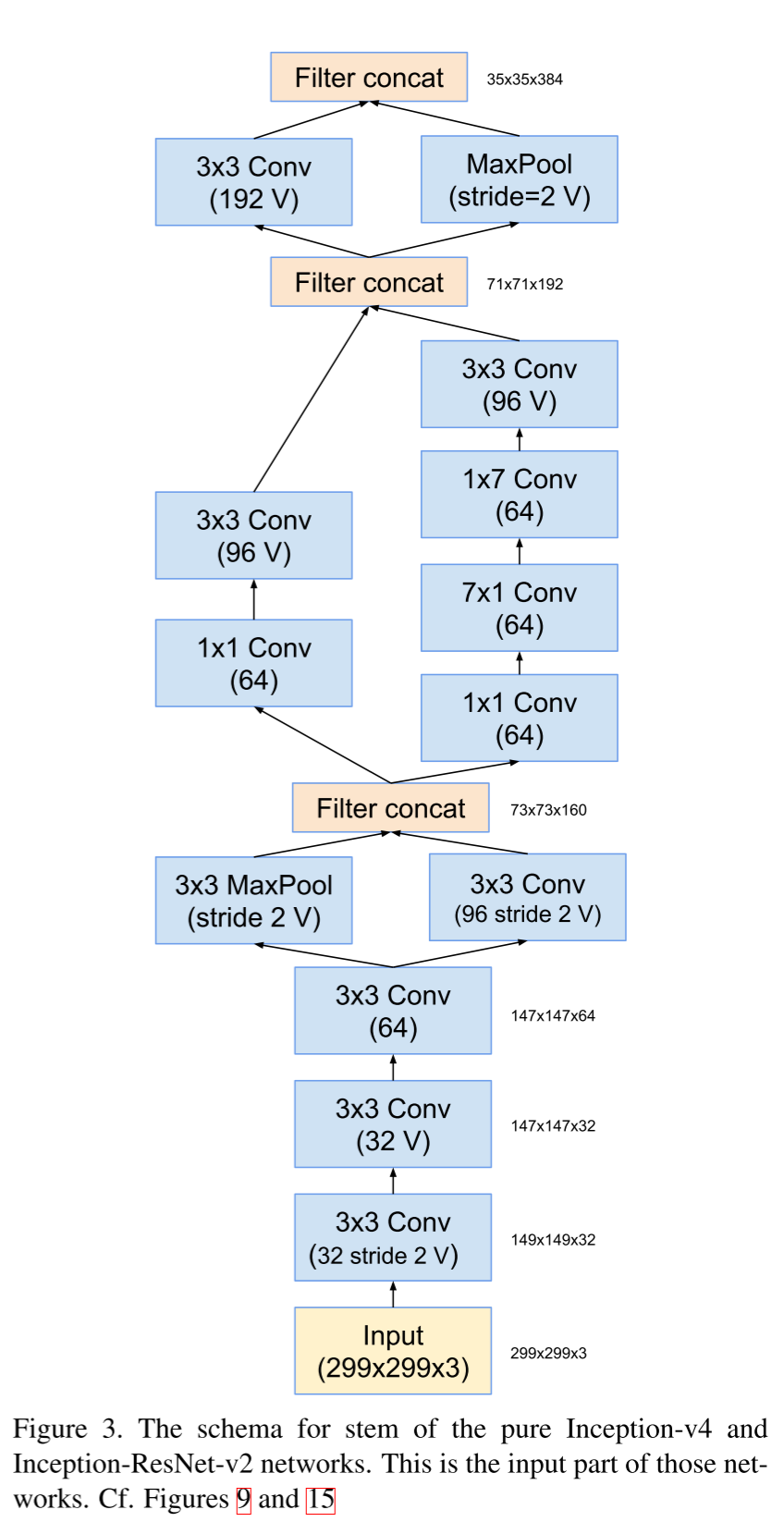
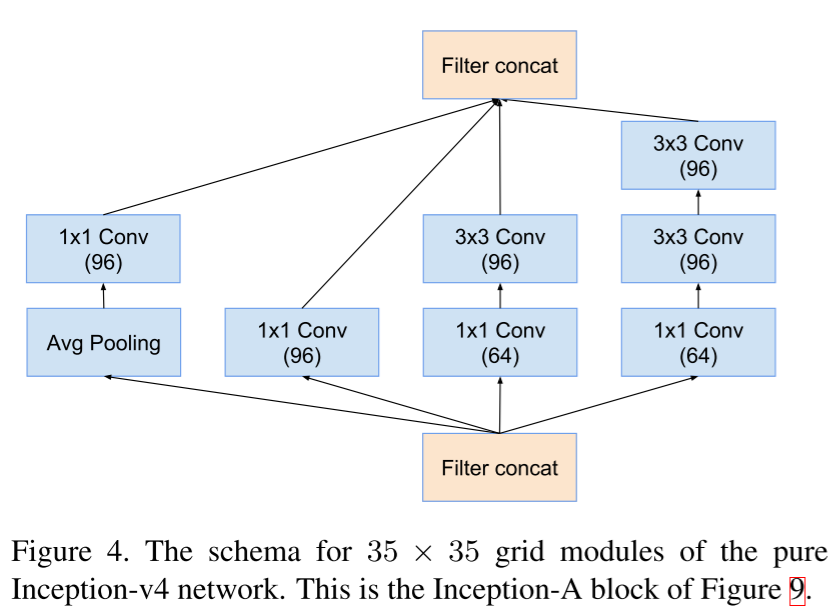
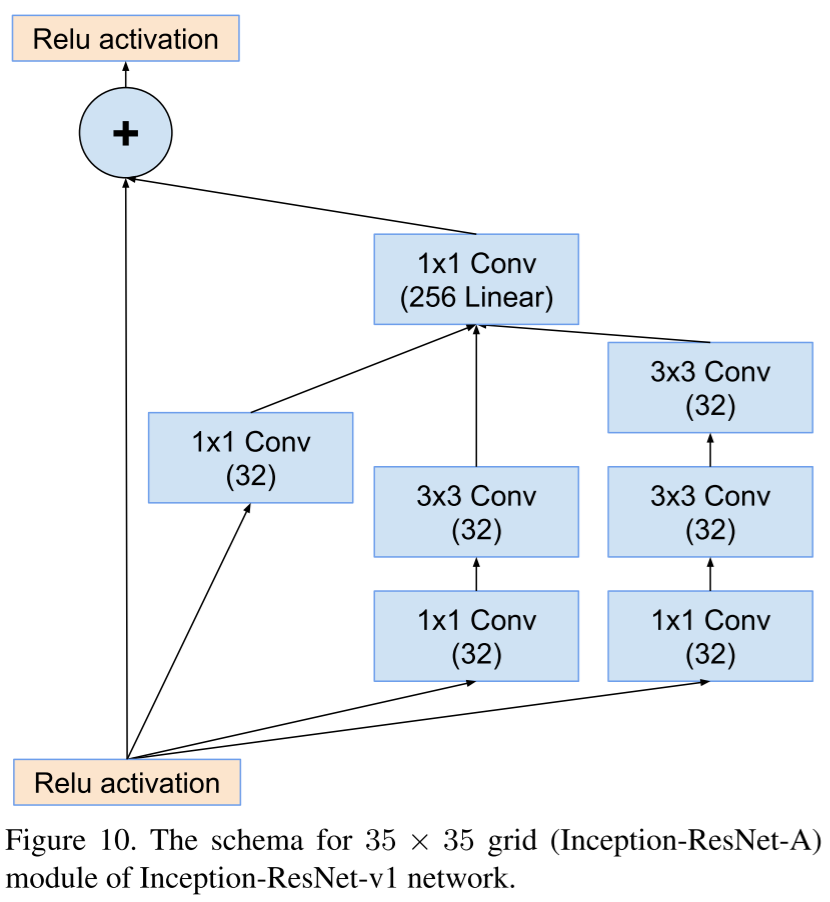
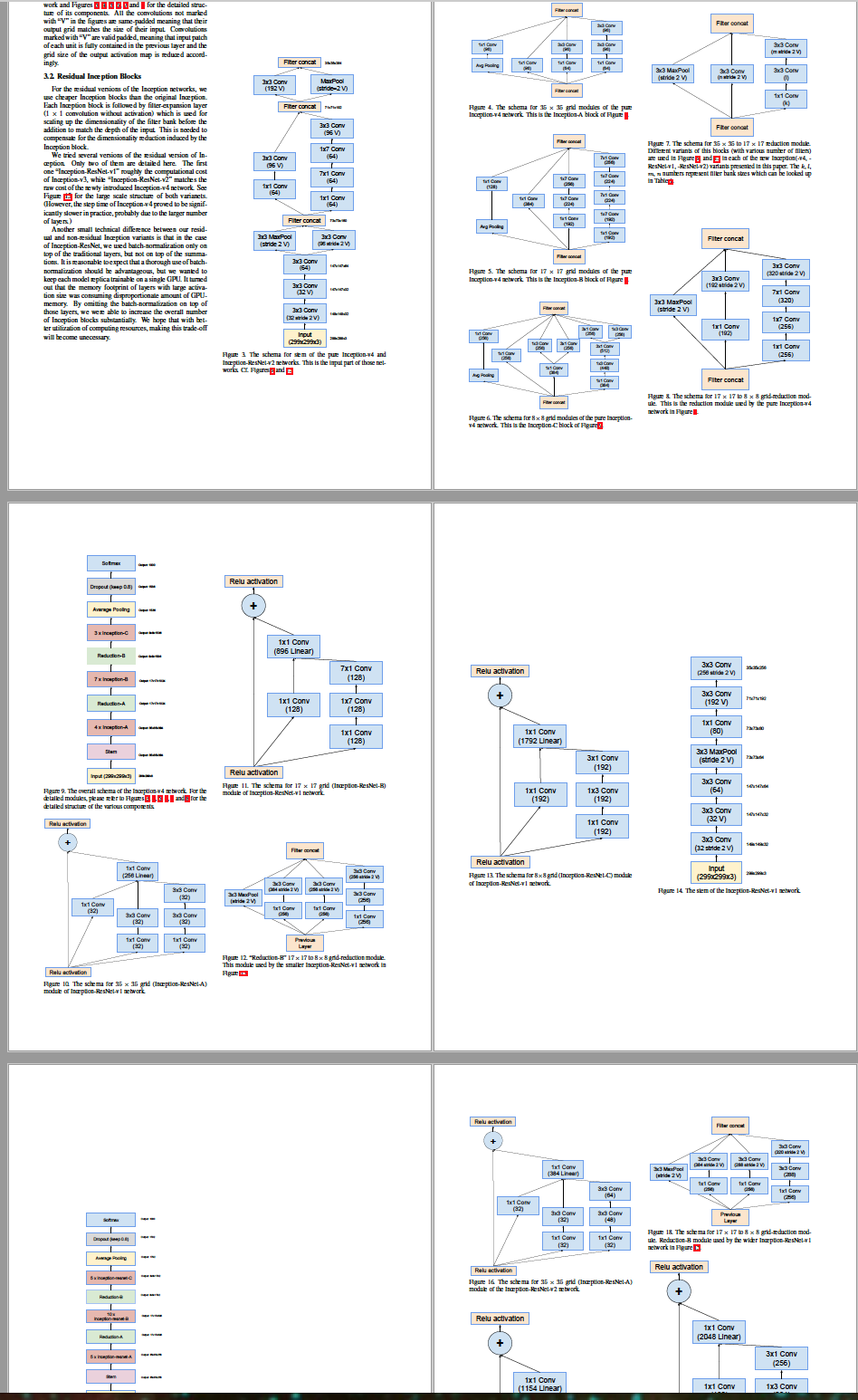
Спустя несколько месяцев гугл публикует статью, в которой задается вопросом, а будет ли лучше работать их модель Inception, если позаимствовать идеи ResNet’а. И внезапно оказывается, что да, если добавить тождественных связей, то и их модель улучшится. Далее в статье идет множество картинок, которые еще больше подтверждают то, что их модель строится в полуавтоматическом режиме. Результатом статьи становятся модели Inception V4 и Inception ResNet.
Inception V4 не особо отличается от предыдущих поколений, здесь они поэкспериментировали с паддингом и упростили Inception-блоки. Честно говоря, мне кажется, версия 4 здесь присутствует только для того, чтобы увеличилось количество страниц, а основная цель — это просто сказать, что резнет и у них работает.
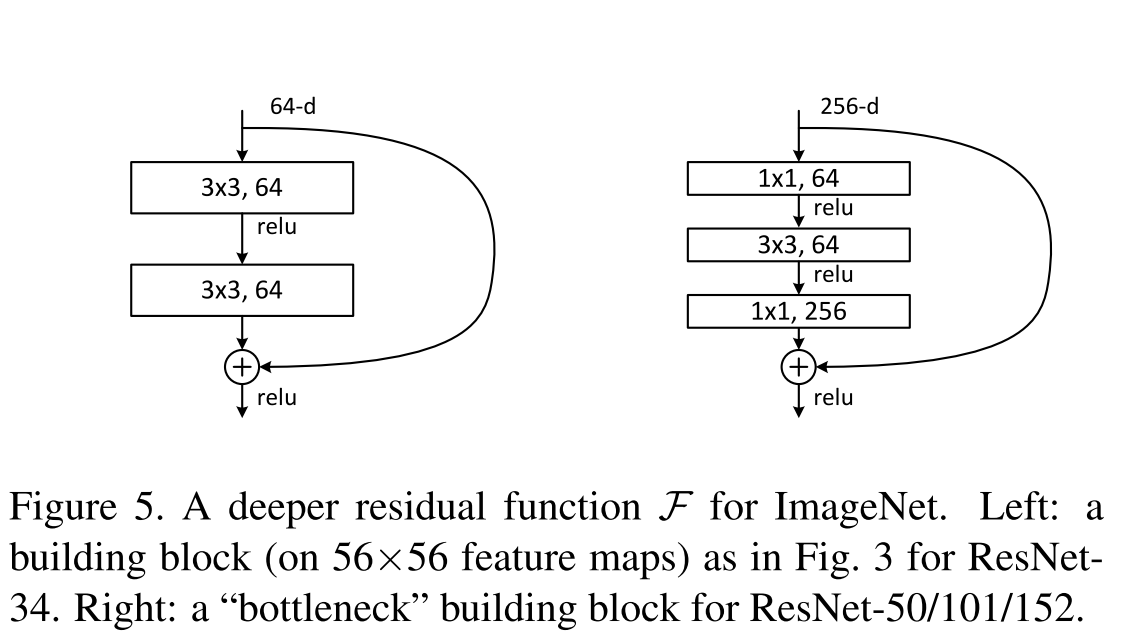
Identity Mappings in Deep Residual Networks (12 Apr 2016)
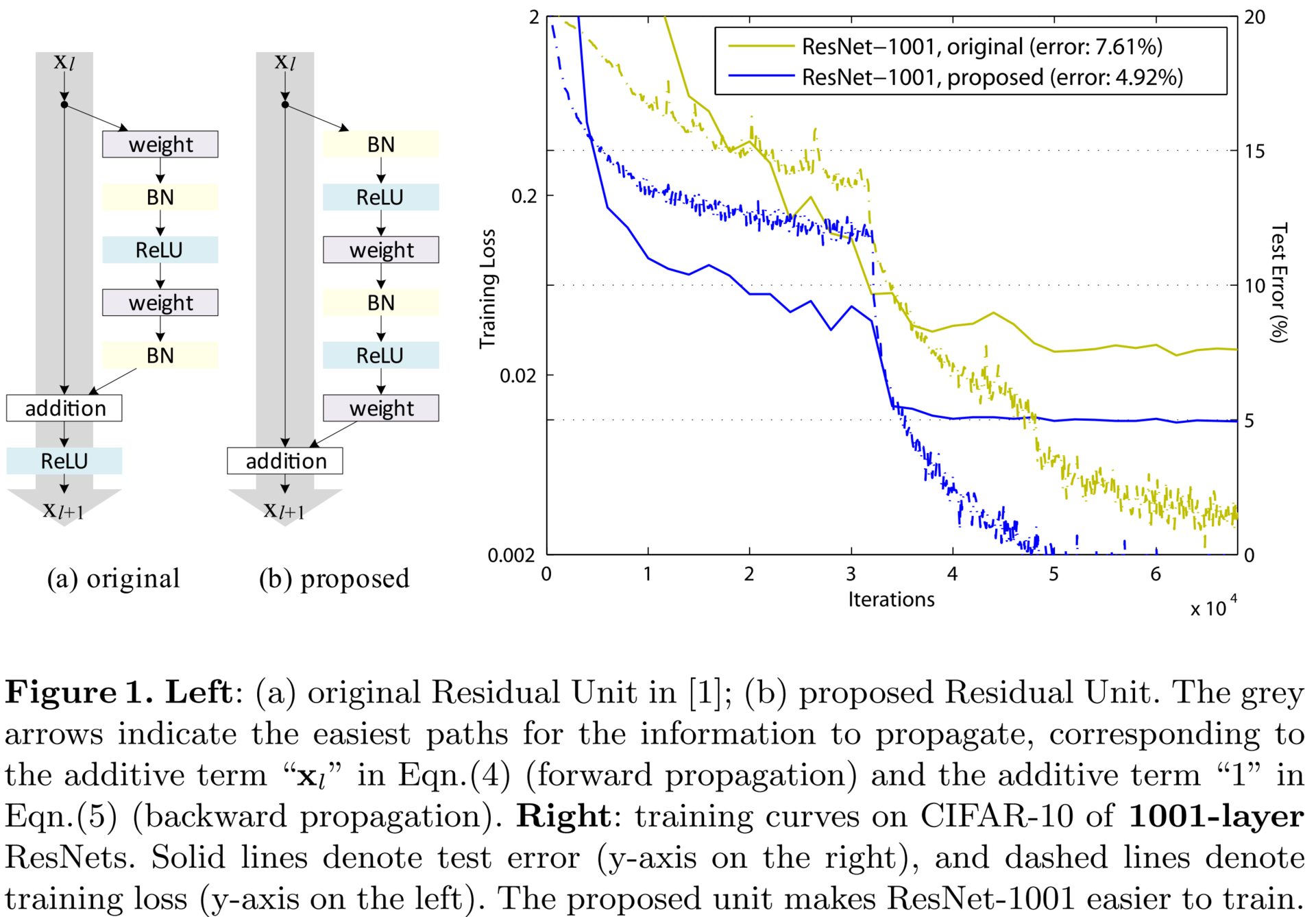
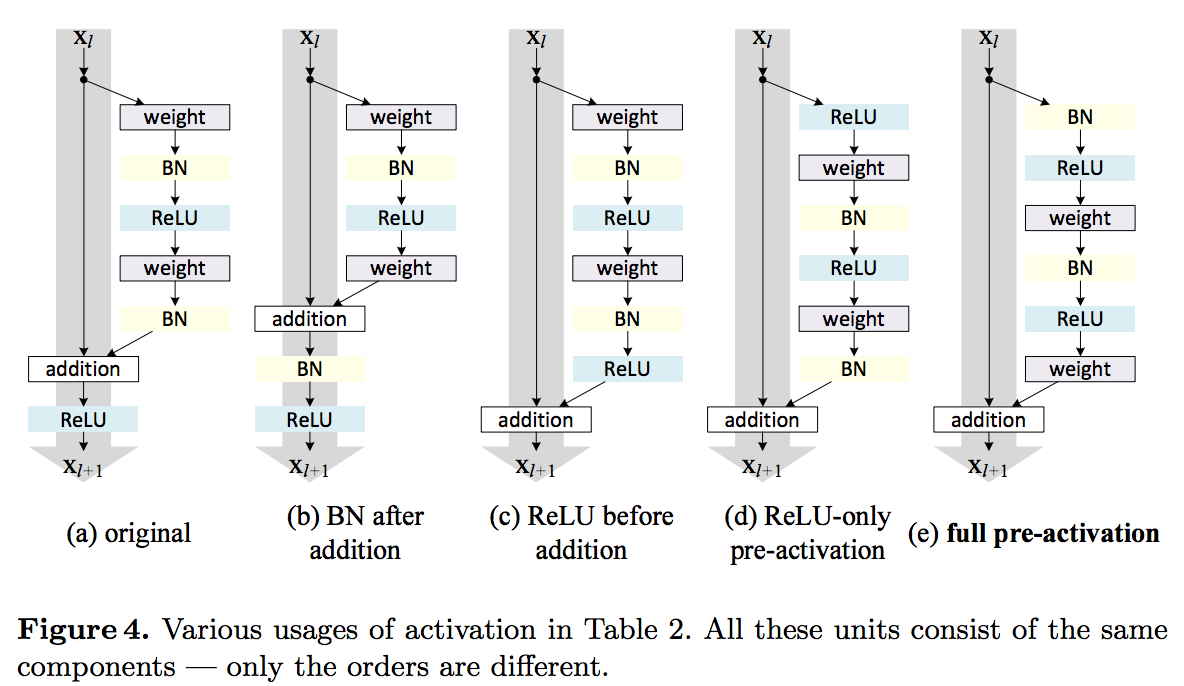
Если вы заглянули в детали реализации оригинального ResNet, то могли заметить, что нелинейность берется после агрегирования двух ветвей: остаточной функции и тождественной связи. Авторы заявляют, что это не совсем правильная техника и лучше вообще не брать нелинейность после агрегации. Лучше как бы сдвинуть все нелинейности на один шаг назад по остаточным ветвям. Таким образом выход из блока подается на тождественную связь следующего, где он неизмененным доходит до своего выхода; а также на остаточную сеть следующего, где над выходом текущего уже применяется нелинейность. Так удалось обучить сверхглубокую нейронную сеть, состоящую из 1001 слоя. Сравните, еще в 2014 году 19-слойная нейронная сеть считалась «very deep convolutional neural networks».
 — вход текущего слоя;
— вход текущего слоя;  — shortcut connection, в нашем случае это просто тожественное преобразование
— shortcut connection, в нашем случае это просто тожественное преобразование  ;
;  — residual network;
— residual network;  — агрегированный выход двух ветвей блока;
— агрегированный выход двух ветвей блока;  — вход следующего блока равен некоторому преобразованию от агрегации двух ветвей предыдущего блока.
— вход следующего блока равен некоторому преобразованию от агрегации двух ветвей предыдущего блока.
Тогда можно рассмотреть две ситуации, в первой
 были равны –1. Авторы считают, что это крайне маловероятно. Таким образом, проблему затухания градиентов можно больше не брать в расчет.
были равны –1. Авторы считают, что это крайне маловероятно. Таким образом, проблему затухания градиентов можно больше не брать в расчет.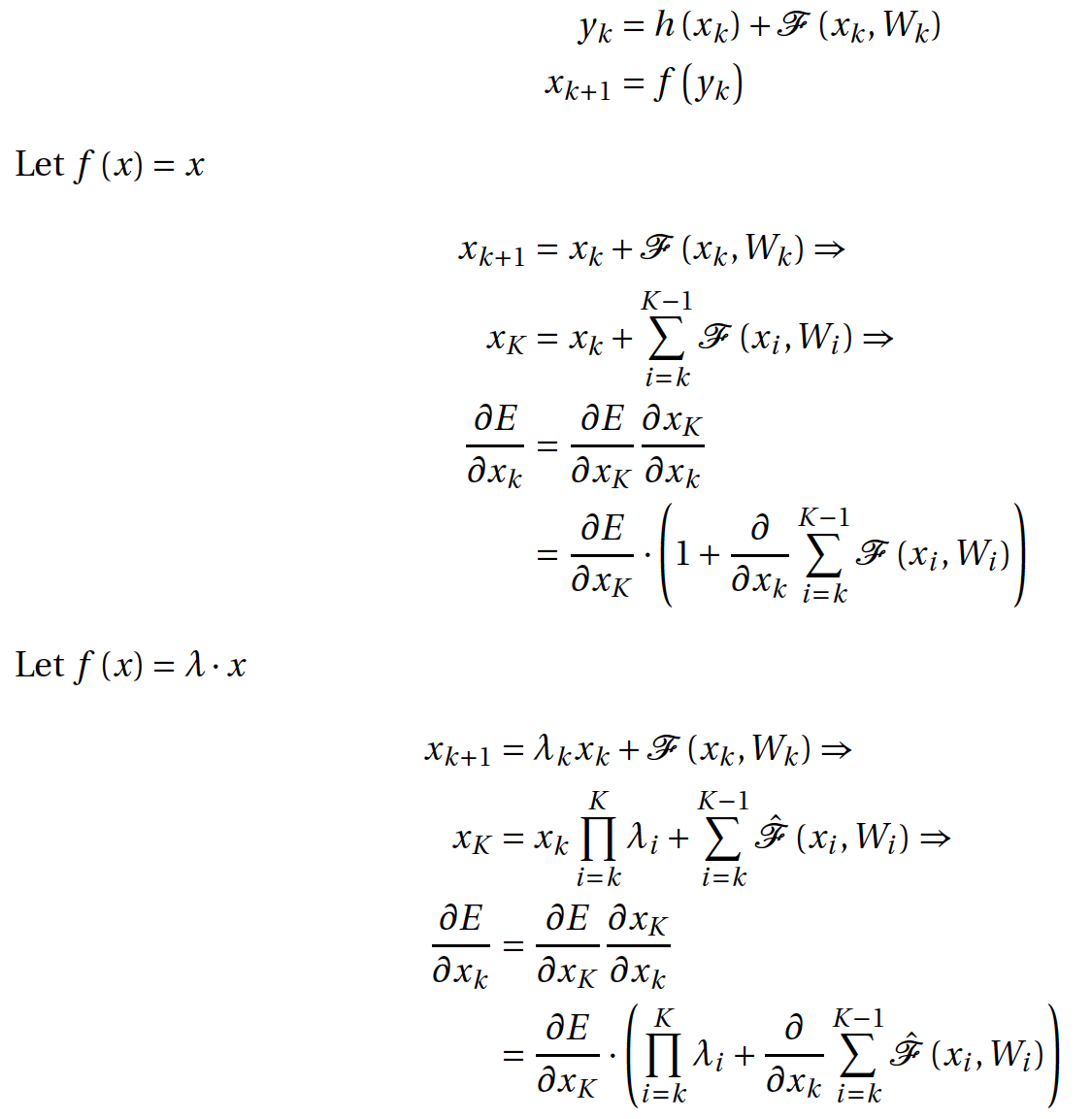
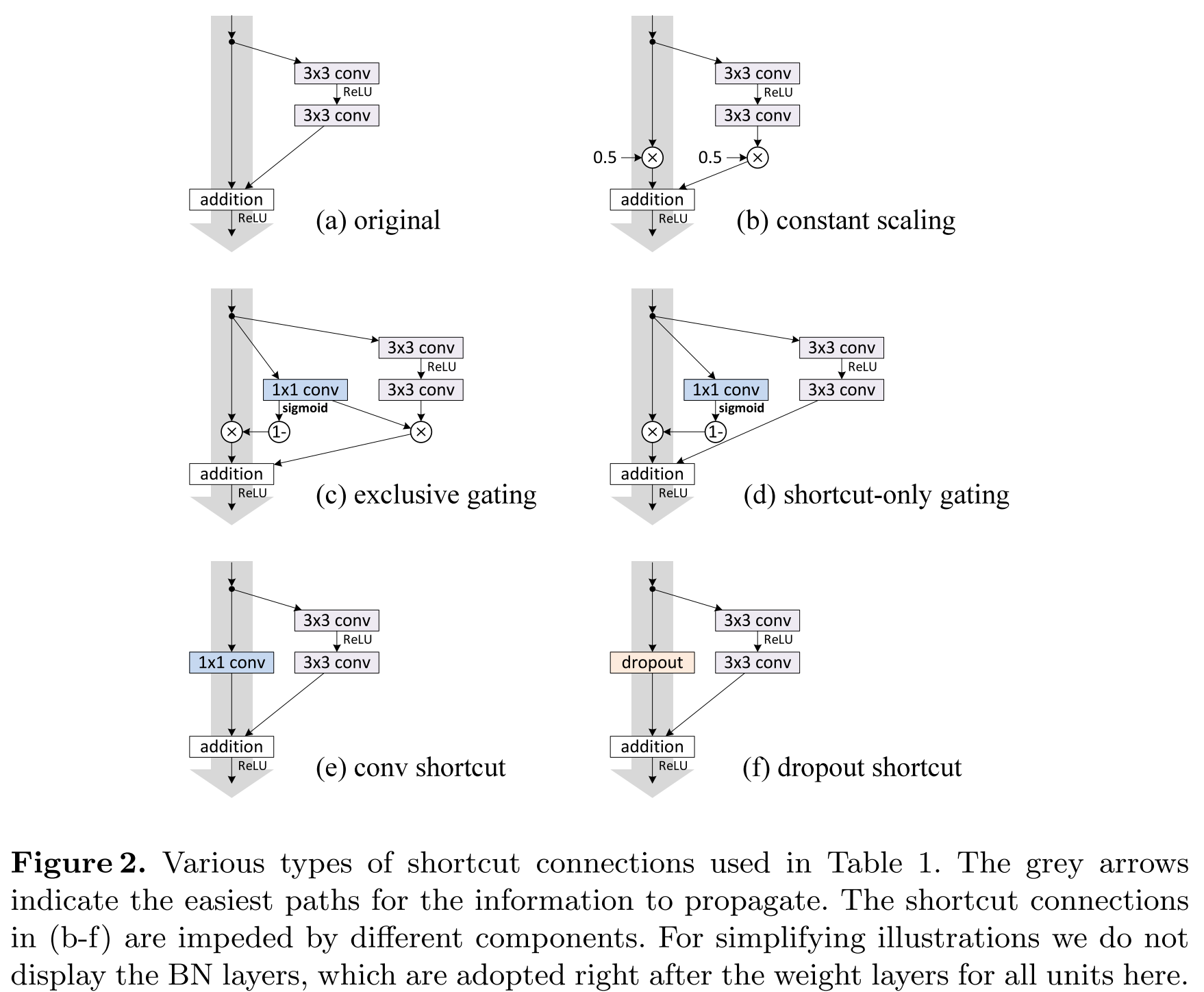
На самом деле авторы исследовали различные конфигурации residual-блока и пришли к выводу, что именно предложенная простая конструкция, со сдвигом нелинейности на шаг назад, самая лучшая.
Bridging the Gaps Between Residual Learning, Recurrent Neural Networks and Visual Cortex (13 Apr 2016)
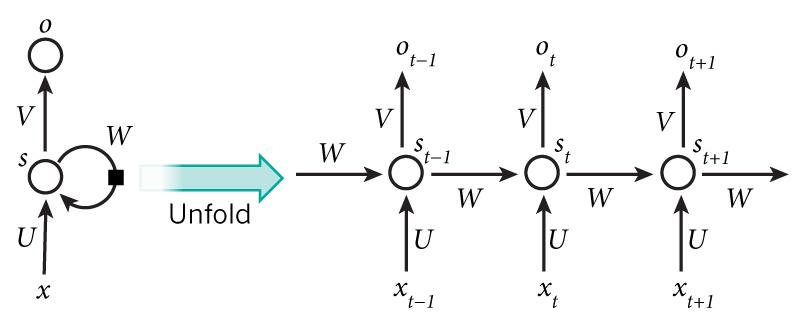
На следующий день появляется статья, в которой авторы сравнивают ResNet и обычные RNN. Одну мысль из этой статьи считаю нужным упомянуть. Авторы утверждают, что успехи глубоких нейронных сетей объясняются тем, что глубокие сети аппроксимируют рекуррентные сети, которые, в свою очередь, аппроксимируют динамические системы и вообще ближе к тому, как работает мозг.
The dark secret of Deep Networks: trying to imitate Recurrent Shallow Networks?
A radical conjecture would be: the effectiveness of most of the deep feedforward neural networks, including but not limited to ResNet, can be attributed to their ability to approximate recurrent computations that are prevalent in most tasks with larger t than shallow feedforward networks. This may offer a new perspective on the theoretical pursuit of the long-standing question “why is deep better than shallow”.
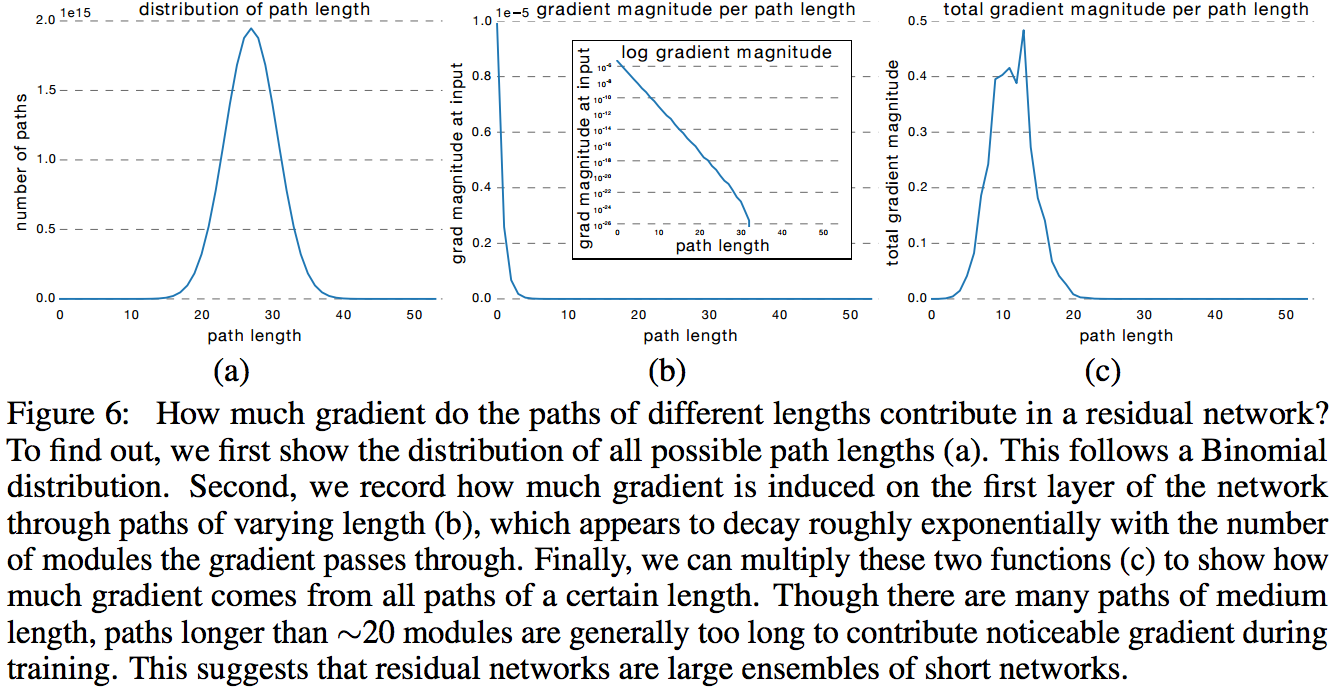
Residual Networks are Exponential Ensembles of Relatively Shallow Networks (20 May 2016)
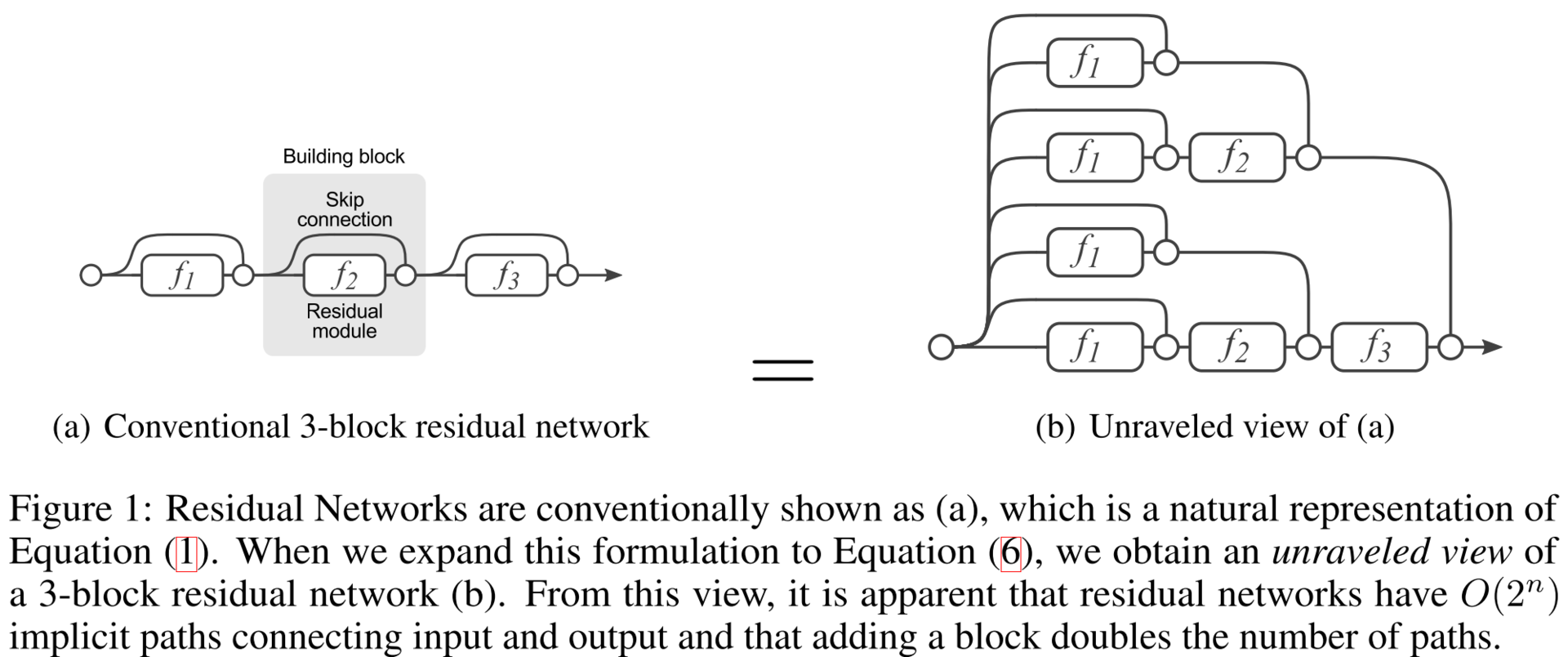
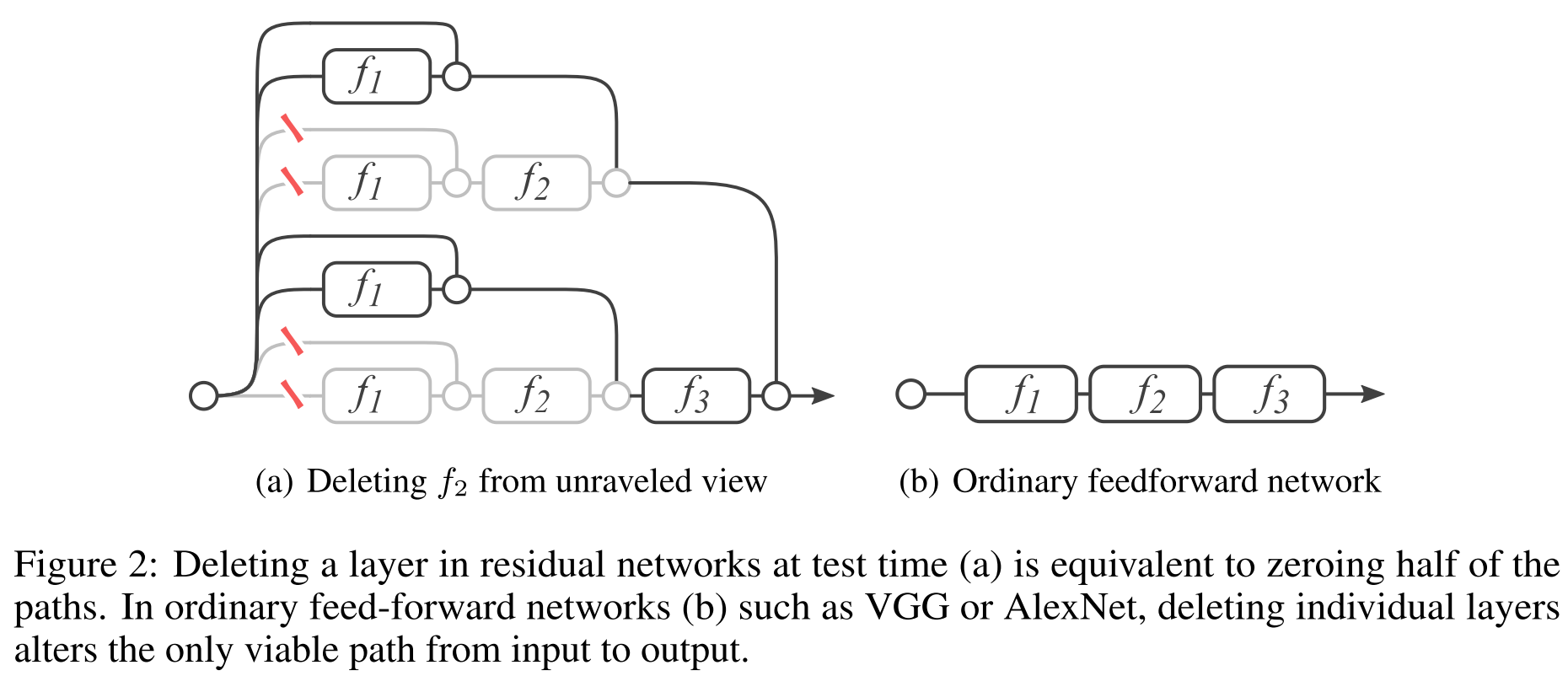
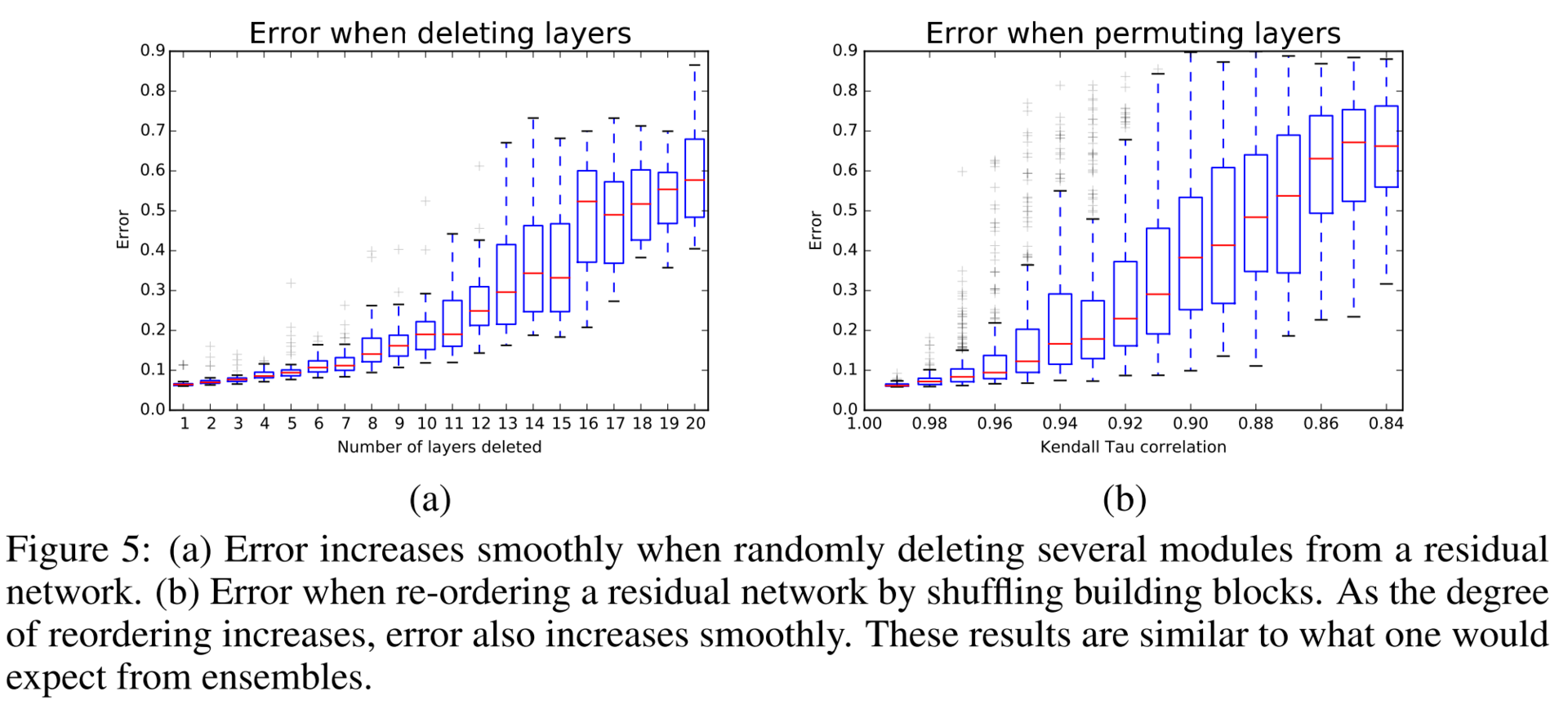
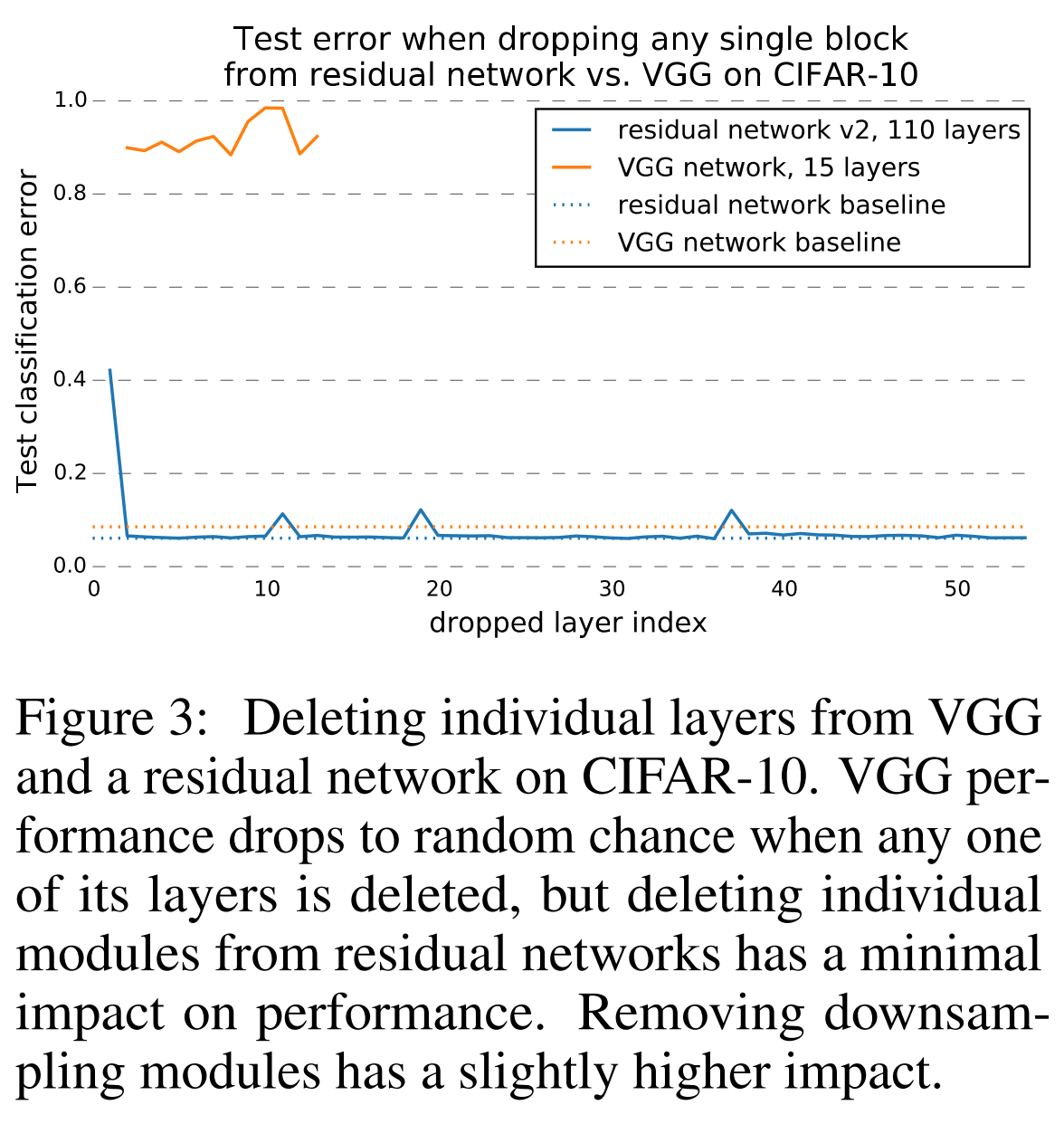
Уверен, почти все из вас знакомы с DropOut, стратегией обучения, которая до недавнего времени являлась стандартом при обучении глубоких сетей. Было показано, что такая стратегия эквивалентна обучению экспоненциально большого числа моделей и усреднению результата прогнозирования. Получается построение ансамбля алгоритмом обучения. Авторы данной статьи показывают, что ResNet — это ансамбль по своей конструкции. Показывают они это серией интересных экспериментов. Для начала посмотрим на развернутый вариант ResNet, который получается, если считать два подряд идущих shortcut-соединения как одно ребро flowing graph’а.

Заключение
ResNet продолжает активно развиваться, и различные группы как пробуют что-то новое, так и применяют проверенные паттерны из прошлого. Например, создают ResNet in ResNet.
- Convolutional Residual Memory Networks (14 Jul 2016)
- Wide Residual Networks (23 May 2016)
- Depth Dropout: Efficient Training of Residual Convolutional Neural Networks
- Resnet in Resnet: Generalizing Residual Architectures (25 Mar 2016)
- Residual Networks of Residual Networks: Multilevel Residual Networks (9 Aug 2016)
- Multi-Residual Networks (24 Sep 2016)
- Deep Learning with Separable Convolutions (7 Oct 2016)
- Deep Pyramidal Residual Networks (10 Oct 2016)
Если вы прочитали что-то, не упомянутое в данном обзоре, расскажите в комментариях. Уследить за всем при таком потоке новых статей просто не реально. Пока данный пост проходил модерацию в блоге, я успел добавить в список еще две новых публикации. В одной гугл рассказывает про новую версию инсептрона — Xception, а во второй — пирамидальный ResNet.
Если спросить у кого-либо, немного разбирающегося в нейронных сетях, какие виды сетей бывают, он скажет обычные (полносвязные и сверточные) и рекуррентные. Похоже, что вскоре появится теоретическая база, в рамках которой все типы нейросетей будут принадлежать к одному классу. Есть теорема универсальной аппроксимации, в которой говорится, что любую (почти) функцию можно приблизить нейросетью. В аналогичной теореме для RNN говорится, что любую динамическую систему можно приблизить рекуррентной сетью. А сейчас оказывается, что и RNN может быть приближена обычной сетью (осталось это доказать, правда). В общем, в интересное время живем.
Телеграм: t.me/ainewsline
Источник: habr.com