Беспилотники способны на многое: от съёмки репортажей и свадеб до мониторинга лесных массивов для быстрого реагирования на пожары, отслеживание состояния энергосетей и нефтепроводов. Потенциально летающие роботы могут быть использованы внутри помещений, но для этого они должны быть одновременно юркими и достаточно мощными, чтобы взаимодействовать с окружением. Для этого японские специалисты создали напоминающего летающее щупальце модульного робота DRAGON, который меняет форму, чтобы проникать в небольшие отверстия и в перспективе выступать в качестве манипулятора.
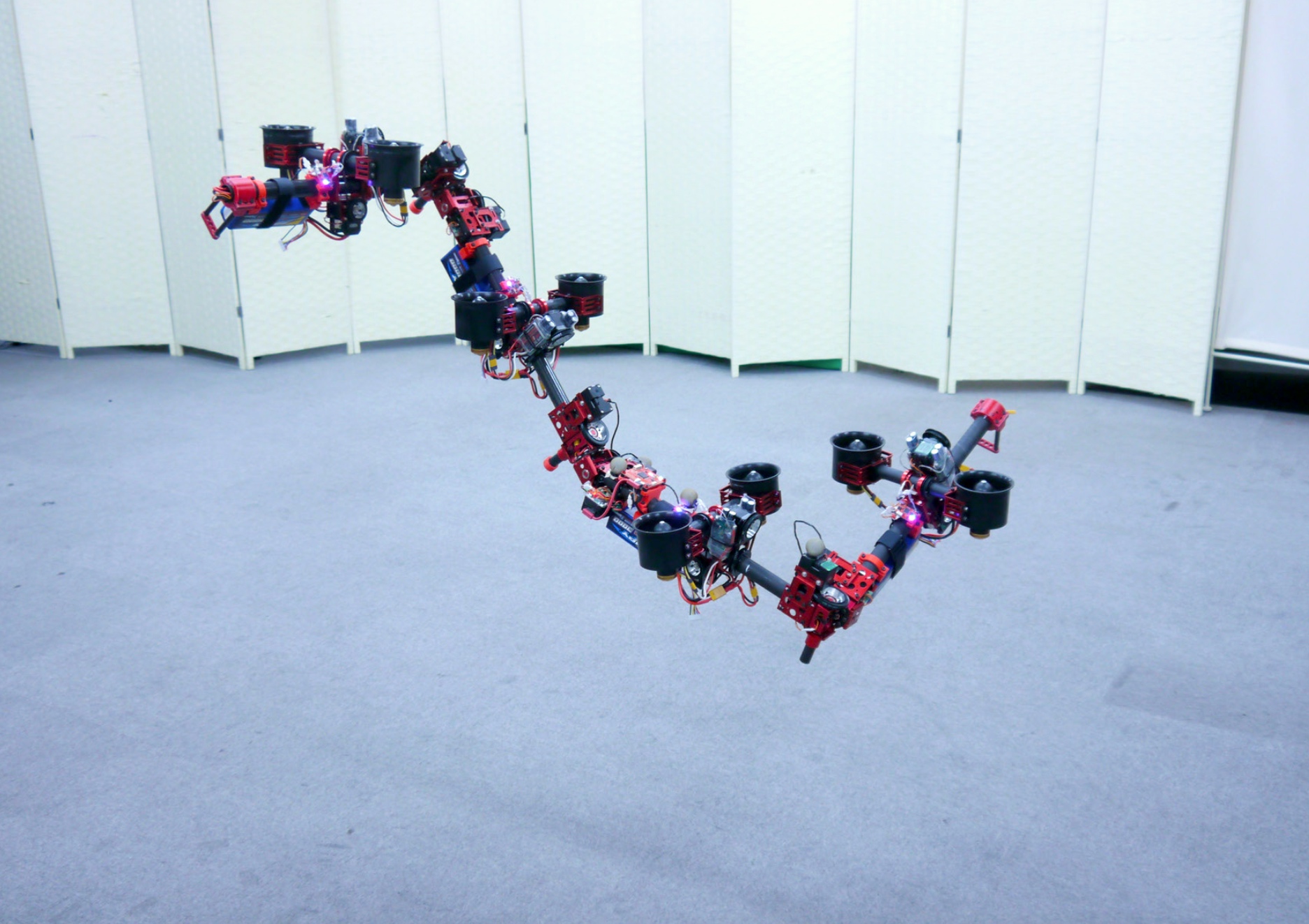
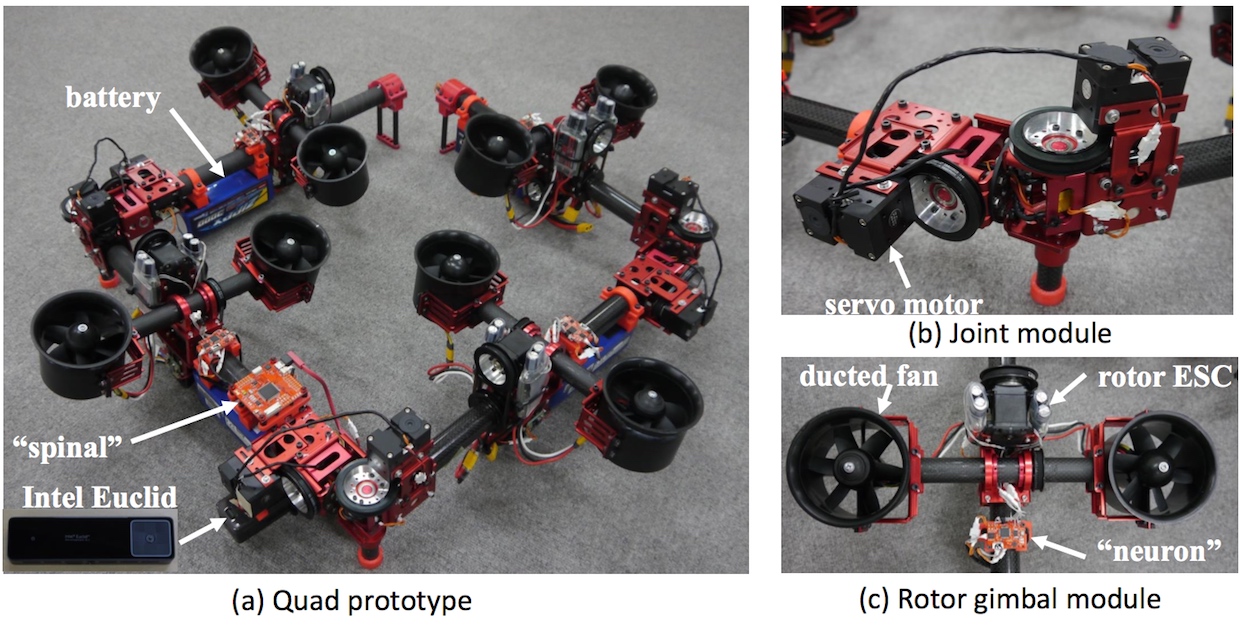
Во время спасательных операций роботу может быть нужно проникнуть через дверь, а затем преодолеть множество других опасных препятствий – не врезаться в стену, шкаф, фикус или человека. Для решения этой проблемы можно сделать очень маленького робота, который бы пролетел в любую щель. Но он сгодится только для наблюдения. Можно оснастить беспилотник защитной рамой – но такой громоздкий дрон не слишком хорошо сможет взаимодействовать с окружением, то есть снова поможет только для поисковых операций. В идеале робот должен быть одновременно маленьким и юрким, но при этом достаточно мощным. В лаборатории JSK Lab Токийского университета робототехники создали робота DRAGON, что расшифровывается как Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON. Модульный аппарат на лету меняет форму – из квадратного коптера он трансформируется в тонкую змейку, что позволяет ему проникать в узкие проходы, или принимать иную форму. DRAGON состоит из модулей, каждый из которых оснащён парой вентиляторов в кольцевом обтекателе. Вентиляторы меняют положение, заставляя модули двигаться в разных направлениях, так что робот может летать практически в любой из форм, которые ему позволят сделать степени свободы. Модули соединены шарнирными креплениями. Аппарат работает на базе компактного компьютера Intel Euclid. Аккумулятора хватает на три минуты полёта, над улучшением этого показателя учёным предстоит поработать. Можно предположить, что аппарат будут записывать по кабелю, но в этом случае он потеряет в маневренности, или найдут иные автономные источники питания. Прототип из четырёх модулей, оснащённых в общей сложности восемью вентиляторами. Одной из задач разработчиков было проектирование программного обеспечения, которое позволяет роботу самостоятельно решать, какую форму принять в том или ином случае. В видеоролике разработчики продемонстрировали, как робот в виде змеи пролетает через небольшой «люк». В будущем робот будет состоять из двенадцати модулей, и при этом сможет поднимать объекты, используя крайние модули в качестве двухпальцевого захвата. Можно предположить, что такой робот может обхватить предмет, чтобы перенести его, или иным образом взаимодействовать с окружением.
Летающие роботы используются для спасательных и мониторинговых операций. На открытых пространствах квадрокоптеры могут кидать утопающим спасательный круг, доставлять до человека дефибрилятор, следить за происходящим с целью поиска потерявшихся людей и мониторинга местности во время чрезвычайных ситуаций для быстрого реагирования. В случае с закрытыми помещениями существуют прототипы змееподобных роботов — например, мягкий робот от исследователей из Стэнфордского университета, который меняет размер, растягивается, искривляется и обхватывает предметы, поднимается на большую высоту, способен пролезть в очень маленькие щели или, например, под ящик до 100 килограммов, чтобы приподнять его. Мягкая оболочка проходит даже по острым предметам вроде гвоздей и меняет форму — насосы накачивают в корпус воздух.
8-метровый аппарат от японских разработчиков из Университета Тохоку создан для поиска людей при землетрясениях. Робот двигается со скоростью до 10 сантиметров в секунду, «перебирая» щетинистой поверхностью. Ранняя версия этого робота использовалась во время ликвидации последствий катастрофы на АЭС Фукусима, но двигалась в основном в одном направлении — вперёд. Новый робот получился более мобильным.
Были попытки объединения летающих и змееподобных роботов. Квадрокоптер от учёных Пенсильванского университета на место происшествия доставляет двух змееподобных роботов, которые могут двигаться по лестнице или проникать в щели.
Прототип от JSK Lab объединит достоинства летающих роботов со змееподобными и будет взаимодействовать различными способами с предметами, вместо того, чтобы заниматься только наблюдением. Один из сотрудников лаборатории JSK описывает DRAGON как «прорывную с точки зрения проектирования конструкции» и «идеальную платформу для воздушных манипуляторов».