Учёные разработали архитектуру для летающего человекоподобного робота
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2017-09-08 11:14
 В научной фантастике полно летающих роботов. Есть и летающие роботы-гуманоиды, созданные по образу и подобию человека. Это и автономные машины, и экзоскелеты, которые управляются изнутри, как Железный человек. Но в реальности у нас таких роботов пока не видно. Есть мультикоптеры, но они не могут ходить по земле, как человек. Инженеры из Итальянского технологического института решили исправить этот недостаток — они разработали архитектуру летающего робота-гуманоида iCub с четырьмя реактивными двигателями и систему управления для него.
В научной фантастике полно летающих роботов. Есть и летающие роботы-гуманоиды, созданные по образу и подобию человека. Это и автономные машины, и экзоскелеты, которые управляются изнутри, как Железный человек. Но в реальности у нас таких роботов пока не видно. Есть мультикоптеры, но они не могут ходить по земле, как человек. Инженеры из Итальянского технологического института решили исправить этот недостаток — они разработали архитектуру летающего робота-гуманоида iCub с четырьмя реактивными двигателями и систему управления для него.
Это один из первых в мире роботов, способных и летать, и ходить, и манипулировать предметами, то есть захватывать их манипуляторами.
Человекоподобные роботы традиционно рассматриваются как земные машины, которые передвигаются по поверхности. Но итальянские учёные уверены, что если добавить такому роботу реактивные двигатели то область его использования значительно расширится, поскольку у него станет больше степеней свободы. Если же сравнить с традиционными беспилотными летательными аппаратами, то они тоже иногда оснащаются манипуляторами, которые могут захватывать предметы, но опять же человекоподобный робот имеет преимущество перед ними, поскольку умеет ходить по земле. Это повышает надёжность и энергоэффективность системы.
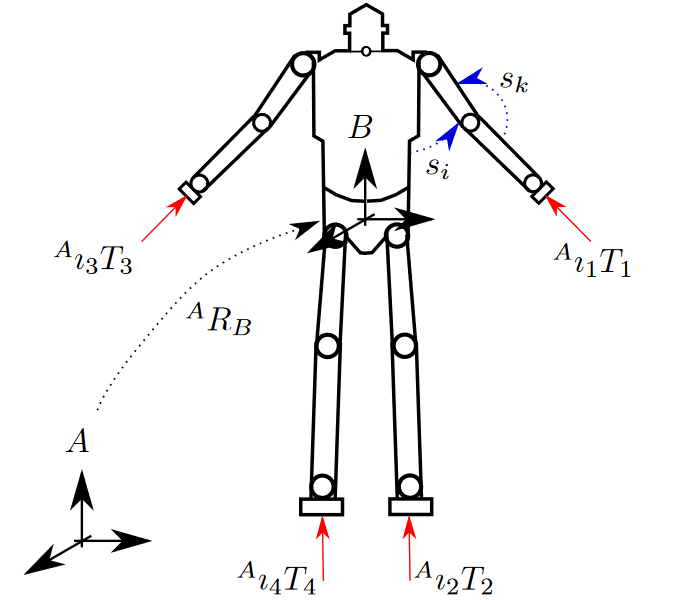
В проекте Итальянского технологического института четыре реактивных двигателя устанавливаются на оконечных эффекторах, то есть «руках» и «ногах» робота. Такое расположение двигателей кажется немного неестественным, но на самом деле подобная мультимодальная схема уже опробована в других конструкциях. Инженеры говорят, что она позволяет стабилизировать расчётную траекторию относительно центра массы с учётом небольших отклонений ориентации опорной рамы робота.
Итальянская разработка пока далека от практической реализации. Разработчики называют её «первым шагом к созданию летающих человекоподобных роботов» и она действительно является всего лишь первым шагом. Что сделали инженеры — так это разработали базовый фреймворк для управления симуляцией робота iCub во время неподвижного зависания в воздухе и плавного движения. Тяга двигателей тоже рассчитана в программе симуляции и учитывается в расчёте системы управления. Эта работа доказывает, что создание такого робота и управление им теоретически возможны, хотя разработчики не принимали в расчёт аэродинамические эффекты и другие факторы, которые могут проявить себя при практической эксплуатации робота. Всему своё время — и такие расчёты, и первые опыты с реальными полётами будут позже, а сейчас задачей было убедиться, что теоретически возможно управлять движением подобного механизма в воздухе.
На видео показано, как робот зависает на одном месте, а также рассчитывает желаемую траекторию для своего центра массы.
Один из разработчиков iCub Даниэле Пуччи (Daniele Pucci) сказал в интервью IEEE Spectrum, что идея создания такого робота появилась у него четыре года назад, когда он перешёл на работу в Итальянский технологический институт. Тогда он задумался, как применить свои разработки в области управления БПЛА на робота с различными «частями тела», то есть не полностью жёстким корпусом.
Даниэле Пуччи считает, что у летающих роботов человекоподобного типа много преимуществ перед обычными мультикоптерами, которые оборудованы роботизированными манипуляторами. Последние часто испытывают проблемы в ветреную погоду, они ведь не могут твёрдо стать на землю, и поэтому требуют более точного управления при попытке захватить неподвижный объект. Тем более что у человекоподобного робота два манипулятора, а не один, что ещё больше облегчает задачу.
Другое преимущество — социальное. В будущем подобные роботы действительно могут использоваться как экзоскелеты для людей, по образу Железного человека. Пример Ричарда Броунинга, лентающего в экзоскелете показывает, что подобные изобретения будут востребованы — в самом деле, кому из нас не хочется полетать в железном корпусе с реактивными двигателями?

Ричард Броунинг завис в метре над землёй
Научная статья опубликована 16 февраля 2017 года на сайте препринтов arXiv.org (arXiv:1702.06075) и подана для публикации в журнал IEEE Robotics and Automation Letters.
Телеграм: t.me/ainewsline
Источник: geektimes.ru