Простейшее управление компьютером при помощи голоса
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Разработка ИИГородские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Атаки на ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Внедрение ИИИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Big data
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Работа разума и сознаниеМодель мозгаРобототехника, БПЛАТрансгуманизмОбработка текстаТеория эволюцииДополненная реальностьЖелезоКиберугрозыНаучный мирИТ индустрияРазработка ПОТеория информацииМатематикаЦифровая экономика
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2017-01-16 17:35
Если вас интересует, как помочь обездвиженному человеку управлять компьютером для общения с внешним миром – вам сюда. Если вам интересно, какое отношение к этому имеют мел-частотные кепстральные коэффициенты и нейронные сети – вам тоже сюда.
Для работы на компьютере Александр использовал программу «Vocal Joystick» — разработку студентов Университета штата Вашингтон, выполненную на деньги Национального Научного Фонда (NSF). См. melodi.ee.washington.edu/vj
Программа была сделана в 2005-2009 годах и хорошо работала на Windows XP. В более свежих версиях Windows программа может зависнуть, что неприемлемо для человека, который не может встать со стула и её перезапустить. Поэтому программу нужно было переделать.
Исходных текстов нет, есть только отдельные публикации, приоткрывающие технологии, на которых она основана (MFCC, MLP – читайте об этом во второй части).
По образу и подобию была написана новая программа (месяца за три).
Собственно, посмотреть, как она работает, можно здесь:
Скачать программу и/или посмотреть исходные коды можно здесь.
Никаких особенных действий для установки программы выполнять не надо, просто щёлкаете на ней, да запускаете. Единственное, в некоторых случаях требуется, чтобы она была запущена от имени администратора (например, при работе с виртуальной клавиатурой “Comfort Keys Pro”):
 Пожалуй, стоит упомянуть здесь и о других вещах, которые я ранее делал для того, чтобы можно было управлять компьютером без рук.
Пожалуй, стоит упомянуть здесь и о других вещах, которые я ранее делал для того, чтобы можно было управлять компьютером без рук.
Если у вас есть возможность поворачивать голову, то хорошей альтернативой eViacam может послужить гироскоп, крепящийся к голове. Вы получите быстрое и точное позиционирование курсора и независимость от освещения.
Подробнее – здесь.
Если вы можете двигать только зрачками глаз, то можно использовать трекер направления взгляда и программу к нему (могут быть сложности, если вы носите очки).
Подробнее – здесь.
Первая задача примечательна лишь тем, что для её решения в реальном времени пришлось вводить в программу три дополнительных потока, так как считывание данных с микрофона, обработка звука, проигрывание звука через звуковую карту происходят асинхронно.
Последняя задача просто реализуется при помощи функции SendInput.
Наибольший же интерес, мне кажется, представляют вторая и третья задачи. Итак.
Из тех признаков, что доступны широкой публике и описаны в учебниках, наибольшее распространение получили так называемые мел-частотные кепстральные коэффициенты (MFCC).
История их такова, что изначально они предназначались совсем для другого, а именно, для подавления эха в сигнале (познавательную статью на эту тему написали уважаемые Оппенгейм и Шафер, да пребудет радость в домах этих благородных мужей. См. A. V. Oppenheim and R.W. Schafer, “From Frequency to Quefrency: A History of the Cepstrum”).
Но человек устроен так, что он склонен использовать то, что ему лучше знакомо. И тем, кто занимался речевыми сигналами, пришло в голову использовать уже готовое компактное представление сигнала в виде MFCC. Оказалось, что, в общем, работает. (Один мой знакомый, специалист по вентиляционным системам, когда я его спросил, как бы сделать дачную беседку, предложил использовать вентиляционные короба. Просто потому, что их он знал лучше других строительных материалов).
Являются ли MFCC хорошим классификатором для звуков? Я бы не сказал. Один и тот же звук, произнесённый мною в разные микрофоны, попадает в разные области пространства MFCC-коэффициентов, а идеальный классификатор нарисовал бы их рядом. Поэтому, в частности, при смене микрофона вы должны заново обучать программу.
 Это всего лишь одна из проекций 13-мерного пространства MFCC в 3-мерное, но и на ней видно, что я имею в виду – красные, фиолетовые и синие точки получены от разных микрофонов: (Plantronix, встроенный массив микрофонов, Jabra), но звук произносился один.
Это всего лишь одна из проекций 13-мерного пространства MFCC в 3-мерное, но и на ней видно, что я имею в виду – красные, фиолетовые и синие точки получены от разных микрофонов: (Plantronix, встроенный массив микрофонов, Jabra), но звук произносился один.
Однако, поскольку ничего лучшего я предложить не могу, также воспользуюсь стандартной методикой – вычислением MFCC-коэффициентов.
Чтобы не ошибиться в реализации, в первых версиях программы в качестве основы был использован код из хорошо известной программы CMU Sphinx, точнее, её реализации на языке C, именующейся pocketsphinx, разработанной в Университете Карнеги-Меллона (мир с ними обоими! (с) Хоттабыч).
Исходные коды pocketsphinx открыты, да вот незадача – если вы их используете, то должны в своей программе (как в исходниках, так и в исполняемом модуле) прописать текст, содержащий, в том числе, следующее:
Мне это показалось неприемлемым, и пришлось код переписать. Это сказалось на быстродействии программы (в лучшую сторону, кстати, хотя «читабельность» кода несколько пострадала). Во многом благодаря использованию библиотек “Intel Performance Primitives”, но и сам кое-что оптимизировал, вроде MEL-фильтра. Тем не менее, проверка на тестовых данных показала, что получаемые MFCC-коэффициенты полностью аналогичны тем, что получаются при помощи, например, утилиты sphinx_fe.
В программах sphinxbase вычисление MFCC-коэффициентов производится следующими шагами:
В эти шаги ещё вклиниваются функции, которые позволяют отделить сигнал от шума и от тишины, типа fe_track_snr, fe_vad_hangover, но нам они не нужны, и отвлекаться на них не будем.
Были выполнены следующие замены для шагов по получению MFCC-коэффициентов:
Что же дальше? У нас есть вектор 13-мерного пространства. Как определить, к какому звуку он относится?
Вспомним, что делают нейроны в искусственных нейронных сетях.
Если у нейрона N входов, то нейрон делит N-мерное пространство пополам. Рубит гиперплоскостью наотмашь. При этом в одной половине пространства он срабатывает (выдаёт положительный ответ), а в другой – не срабатывает.
Давайте посмотрим на [практически] самый простой вариант – нейрон с двумя входами. Он, естественно, будет делить пополам двумерное пространство.
Пусть на вход подаются значения X1 и X2, которые нейрон умножает на весовые коэффициенты W1 и W2, и добавляет свободный член C.
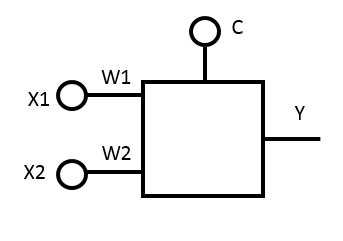
Итого, на выходе нейрона (обозначим его за Y) получаем:
Y=X1*W1+X2*W2+C
(опустим пока тонкости про сигмоидальные функции)
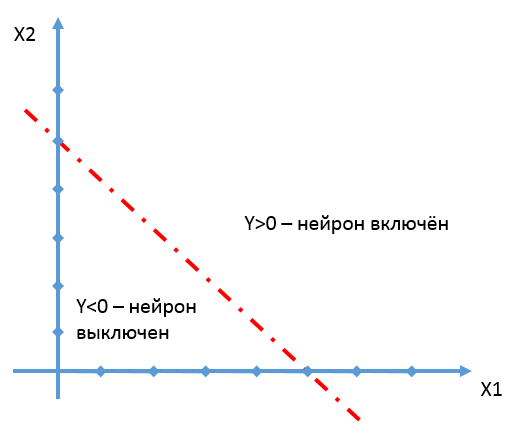
Считаем, что нейрон срабатывает, когда Y>0. Прямая, заданная уравнением 0=X1*W1+X2*W2+C как раз и делит пространство на часть, где Y>0, и часть, где Y<0.
Проиллюстрируем сказанное конкретными числами.
Пусть W1=1, W2=1, C=-5;
 Теперь посмотрим, как нам организовать нейронную сеть, которая бы срабатывала на некоторой области пространства, условно говоря – пятне, и не срабатывала во всех остальных местах.
Теперь посмотрим, как нам организовать нейронную сеть, которая бы срабатывала на некоторой области пространства, условно говоря – пятне, и не срабатывала во всех остальных местах.
Из рисунка видно, что для того, чтобы очертить область в двумерном пространстве, нам потребуется по меньшей мере 3 прямых, то есть 3 связанных с ними нейрона.
 Эти три нейрона мы объединим вместе при помощи ещё одного слоя, получив многослойную нейронную сеть (MLP).
Эти три нейрона мы объединим вместе при помощи ещё одного слоя, получив многослойную нейронную сеть (MLP).
 А если нам нужно, чтобы нейронная сеть срабатывала в двух областях пространства, то потребуется ещё минимум три нейрона (4,5,6 на рисунках):
А если нам нужно, чтобы нейронная сеть срабатывала в двух областях пространства, то потребуется ещё минимум три нейрона (4,5,6 на рисунках):

И тут уж без третьего слоя не обойтись:

А третий слой – это уже почти Deep Learning…
 Теперь обратимся за помощью к ещё одному примеру. Пусть наша нейронная сеть должна выдавать положительный ответ на красных точках, и отрицательный – на синих точках.
Теперь обратимся за помощью к ещё одному примеру. Пусть наша нейронная сеть должна выдавать положительный ответ на красных точках, и отрицательный – на синих точках.
 Если бы меня попросили отрезать прямыми красное от синего, то я бы сделал это как-то так:
Если бы меня попросили отрезать прямыми красное от синего, то я бы сделал это как-то так:
 Но нейронная сеть априори не знает, сколько прямых (нейронов) ей понадобится. Этот параметр надо задать перед обучением сети. И делает это человек на основе… интуиции или проб и ошибок.
Но нейронная сеть априори не знает, сколько прямых (нейронов) ей понадобится. Этот параметр надо задать перед обучением сети. И делает это человек на основе… интуиции или проб и ошибок.
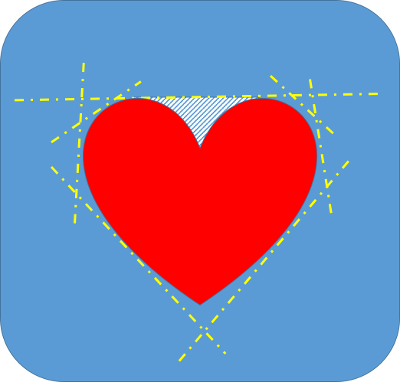
Если мы выберем слишком мало нейронов в первом слое (три, например), то можем получить вот такую нарезку, которая будет давать много ошибок (ошибочная область заштрихована):
 Но даже если число нейронов достаточно, в результате тренировки сеть может «не сойтись», то есть достигнуть некоторого стабильного состояния, далёкого от оптимального, когда процент ошибок будет высок. Как вот здесь, верхняя перекладина улеглась на два горба и никуда с них не уйдёт. А под ней большая область, порождающая ошибки:
Но даже если число нейронов достаточно, в результате тренировки сеть может «не сойтись», то есть достигнуть некоторого стабильного состояния, далёкого от оптимального, когда процент ошибок будет высок. Как вот здесь, верхняя перекладина улеглась на два горба и никуда с них не уйдёт. А под ней большая область, порождающая ошибки:
 Снова, возможность таких случаев зависит от начальных условий обучения и последовательности обучения, то есть от случайных факторов:
Снова, возможность таких случаев зависит от начальных условий обучения и последовательности обучения, то есть от случайных факторов:
Есть ещё один неприятный момент, связанный с нейронными сетями. Их «забывчивость».
Если начать скармливать сети только синие точки, и перестать скармливать красные, то она может спокойно отхватить себе кусок красной области, переместив туда свои границы:
 Если у нейронных сетей столько недостатков, и человек может провести границы гораздо эффективнее нейронной сети, зачем же их тогда вообще использовать?
Если у нейронных сетей столько недостатков, и человек может провести границы гораздо эффективнее нейронной сети, зачем же их тогда вообще использовать?
А есть одна маленькая, но очень существенная деталь.
Я очень хорошо могу отделить красное сердечко от синего фона отрезками прямых в двумерном пространстве.
Я неплохо смогу отделить плоскостями статую Венеры от окружающего её трёхмерного пространства.
Но в четырёхмерном пространстве я не смогу ничего, извините. А в 13-мерном — тем более.
А вот для нейронной сети размерность пространства препятствием не является. Я посмеивался над ней в пространствах малой размерности, но стоило выйти за пределы обыденного, как она меня легко уделала.
Тем не менее вопрос пока открыт – насколько оправдано применение нейронной сети в данной конкретной задаче, учитывая перечисленные выше недостатки нейронных сетей.
Забудем на секунду, что наши MFCC-коэффициенты находятся в 13-мерном пространстве, и представим, что они двумерные, то есть точки на плоскости. Как в этом случае можно было бы отделить один звук от другого?
Пусть MFCC-точки звука 1 имеют среднеквадратическое отклонение R1, что [грубо] означает, что точки, не слишком далеко отклоняющиеся от среднего, наиболее характерные точки, находятся внутри круга с радиусом R1. Точно так же точки, которым мы доверяем у звука 2 находятся внутри круга с радиусом R2.
 Внимание, вопрос: где провести прямую, которая лучше всего отделяла бы звук 1 от звука 2?
Внимание, вопрос: где провести прямую, которая лучше всего отделяла бы звук 1 от звука 2?
Напрашивается ответ: посередине между границами кругов. Возражения есть? Возражений нет.
Исправление: В программе эта граница делит отрезок, соединяющий центры кругов в соотношении R1:R2, так правильнее.
 Далее, представим, что звука три. В этом случае проведём границы между каждой парой звуков.
Далее, представим, что звука три. В этом случае проведём границы между каждой парой звуков.
 И, наконец, не забудем, что где-то в пространстве есть точка, которая является представлением полной тишины в MFCC-пространстве. Нет, это не 13 нулей, как могло бы показаться. Это одна точка, у которой не может быть среднеквадратического отклонения. И прямые, которыми мы отрежем её от наших трёх звуков, можно провести прямо по границам окружностей:
И, наконец, не забудем, что где-то в пространстве есть точка, которая является представлением полной тишины в MFCC-пространстве. Нет, это не 13 нулей, как могло бы показаться. Это одна точка, у которой не может быть среднеквадратического отклонения. И прямые, которыми мы отрежем её от наших трёх звуков, можно провести прямо по границам окружностей:
 На рисунке ниже каждому звуку соответствует кусок пространства своего цвета, и мы можем всегда сказать, к какому звуку относится та или иная точка пространства (или не относится ни к какому):
На рисунке ниже каждому звуку соответствует кусок пространства своего цвета, и мы можем всегда сказать, к какому звуку относится та или иная точка пространства (или не относится ни к какому):
 Ну, хорошо, а теперь вспомним, что пространство 13-мерное, и то, что было хорошо рисовать на бумаге, теперь оказывается тем, что не укладывается в человеческом мозгу.
Ну, хорошо, а теперь вспомним, что пространство 13-мерное, и то, что было хорошо рисовать на бумаге, теперь оказывается тем, что не укладывается в человеческом мозгу.
Так, да не так. К счастью, в пространстве любой размерности остаются такие понятия, как точка, прямая, [гипер]плоскость, [гипер]сфера.
Мы повторяем все те же действия и в 13-мерном пространстве: находим дисперсию, определяем радиусы [гипер]сфер, соединяем их центры прямой, рубим её [гипер]плоскостью в точке, равно отдалённой от границ [гипер]сфер.
Никакая нейронная сеть не сможет более правильно отделить один звук от другого.
Здесь, правда, следует сделать оговорку. Всё это справедливо, если информация о звуке – это облако точек, отклоняющихся от среднего одинаково во всех направлениях, то есть хорошо вписывающееся в гиперсферу. Если бы это облако было фигурой сложной формы, например, 13-мерной изогнутой сосиской, то все приведённые выше рассуждения были бы не верны. И возможно, при правильном обучении, нейронная сеть смогла бы показать здесь свои сильные стороны.
Но я бы не рисковал. А применил бы, например, наборы нормальных распределений (GMM), (что, кстати и сделано в CMU Sphinx). Всегда приятнее, когда ты понимаешь, какой конкретно алгоритм привёл к получению результата. А не как в нейронной сети: Оракул, на основе своего многочасового варения бульона из данных для тренировки, повелевает вам принять решение, что запрашиваемый звук – это звук №3. (Меня особенно напрягает, когда нейронной сети пытаются доверить управление автомобилем. Как потом в нестандартной ситуации понять, из-за чего машина повернула влево, а не вправо? Всемогущий Нейрон повелел?).
Но наборы нормальных распределений – это уже отдельная большая тема, которая выходит за рамки этой статьи.
Надеюсь, что статья была полезной, и/или заставила ваши мозговые извилины поскрипеть.
Часть I. Программа для управления компьютером при помощи голоса
Ко мне обратился человек с просьбой написать программу, которая позволила бы управлять компьютерной мышью при помощи голоса. Тогда я и представить себе не мог, что, практически полностью парализованный человек, который даже не может сам повернуть голову, а может лишь разговаривать, способен развить бурную деятельность, помогая себе и другим жить активной жизнью, получать новые знания и навыки, работать и зарабатывать, общаться с другими людьми по всему свету, участвовать в конкурсе социальных проектов. Позволю себе привести здесь пару ссылок на сайты, автором и/или идейным вдохновителем которых является этот человек – Александр Макарчук из города Борисов, Беларусь: | «У Совы» — школа дистанционного обучения для людей с ограниченными возможностями. sova.by |
 | «Без ограничений» — советы для тех, кому нужно работать на компьютере без рук bezogranicheniy.ru |
Для работы на компьютере Александр использовал программу «Vocal Joystick» — разработку студентов Университета штата Вашингтон, выполненную на деньги Национального Научного Фонда (NSF). См. melodi.ee.washington.edu/vj
Не удержался
Кстати, на сайте университета (http://www.washington.edu/) 90% статей именно про деньги. Трудно найти что-нибудь про научную работу. Вот, например, выдержки с первой страницы: «Том, выпускник университета, раньше питался грибами и с трудом платил за квартиру. Теперь он старший менеджер ИТ-компании и кредитует университет», «Большие Данные помогают бездомным», «Компания обязалась заплатить 5 миллионов долларов за новый учебный корпус».
Это одному мне режет глаз?
Это одному мне режет глаз?
Программа была сделана в 2005-2009 годах и хорошо работала на Windows XP. В более свежих версиях Windows программа может зависнуть, что неприемлемо для человека, который не может встать со стула и её перезапустить. Поэтому программу нужно было переделать.
Исходных текстов нет, есть только отдельные публикации, приоткрывающие технологии, на которых она основана (MFCC, MLP – читайте об этом во второй части).
По образу и подобию была написана новая программа (месяца за три).
Собственно, посмотреть, как она работает, можно здесь:
Никаких особенных действий для установки программы выполнять не надо, просто щёлкаете на ней, да запускаете. Единственное, в некоторых случаях требуется, чтобы она была запущена от имени администратора (например, при работе с виртуальной клавиатурой “Comfort Keys Pro”):
Пожалуй, стоит упомянуть здесь и о других вещах, которые я ранее делал для того, чтобы можно было управлять компьютером без рук.Если у вас есть возможность поворачивать голову, то хорошей альтернативой eViacam может послужить гироскоп, крепящийся к голове. Вы получите быстрое и точное позиционирование курсора и независимость от освещения.
Подробнее – здесь.
Если вы можете двигать только зрачками глаз, то можно использовать трекер направления взгляда и программу к нему (могут быть сложности, если вы носите очки).
Подробнее – здесь.
Часть II. Как это устроено?
Из опубликованных материалов о программе «Vocal Joystick» было известно, что работает она следующим образом:- Нарезка звукового потока на кадры по 25 миллисекунд с перехлёстом по 10 миллисекунд
- Получение 13 кепстральных коэффициентов (MFCC) для каждого кадра
- Проверка того, что произносится один из 6 запомненных звуков (4 гласных и 2 согласных) при помощи многослойного персептрона (MLP)
- Воплощение найденных звуков в движение/щелчки мыши
Первая задача примечательна лишь тем, что для её решения в реальном времени пришлось вводить в программу три дополнительных потока, так как считывание данных с микрофона, обработка звука, проигрывание звука через звуковую карту происходят асинхронно.
Последняя задача просто реализуется при помощи функции SendInput.
Наибольший же интерес, мне кажется, представляют вторая и третья задачи. Итак.
Задача №2. Получение 13 кепстральных коэффициентов
Если кто не в теме – основная проблема узнавания звуков компьютером заключается в следующем: трудно сравнить два звука, так как две непохожие по очертанию звуковые волны могут звучать похоже с точки зрения человеческого восприятия. И среди тех, кто занимается распознаванием речи, идёт поиск «философского камня» — набора признаков, которые бы однозначно классифицировали звуковую волну.Из тех признаков, что доступны широкой публике и описаны в учебниках, наибольшее распространение получили так называемые мел-частотные кепстральные коэффициенты (MFCC).
История их такова, что изначально они предназначались совсем для другого, а именно, для подавления эха в сигнале (познавательную статью на эту тему написали уважаемые Оппенгейм и Шафер, да пребудет радость в домах этих благородных мужей. См. A. V. Oppenheim and R.W. Schafer, “From Frequency to Quefrency: A History of the Cepstrum”).
Но человек устроен так, что он склонен использовать то, что ему лучше знакомо. И тем, кто занимался речевыми сигналами, пришло в голову использовать уже готовое компактное представление сигнала в виде MFCC. Оказалось, что, в общем, работает. (Один мой знакомый, специалист по вентиляционным системам, когда я его спросил, как бы сделать дачную беседку, предложил использовать вентиляционные короба. Просто потому, что их он знал лучше других строительных материалов).
Являются ли MFCC хорошим классификатором для звуков? Я бы не сказал. Один и тот же звук, произнесённый мною в разные микрофоны, попадает в разные области пространства MFCC-коэффициентов, а идеальный классификатор нарисовал бы их рядом. Поэтому, в частности, при смене микрофона вы должны заново обучать программу.
Это всего лишь одна из проекций 13-мерного пространства MFCC в 3-мерное, но и на ней видно, что я имею в виду – красные, фиолетовые и синие точки получены от разных микрофонов: (Plantronix, встроенный массив микрофонов, Jabra), но звук произносился один.Однако, поскольку ничего лучшего я предложить не могу, также воспользуюсь стандартной методикой – вычислением MFCC-коэффициентов.
Чтобы не ошибиться в реализации, в первых версиях программы в качестве основы был использован код из хорошо известной программы CMU Sphinx, точнее, её реализации на языке C, именующейся pocketsphinx, разработанной в Университете Карнеги-Меллона (мир с ними обоими! (с) Хоттабыч).
Исходные коды pocketsphinx открыты, да вот незадача – если вы их используете, то должны в своей программе (как в исходниках, так и в исполняемом модуле) прописать текст, содержащий, в том числе, следующее:
* This work was supported in part by funding from the Defense Advanced * Research Projects Agency and the National Science Foundation of the * United States of America, and the CMU Sphinx Speech Consortium.Мне это показалось неприемлемым, и пришлось код переписать. Это сказалось на быстродействии программы (в лучшую сторону, кстати, хотя «читабельность» кода несколько пострадала). Во многом благодаря использованию библиотек “Intel Performance Primitives”, но и сам кое-что оптимизировал, вроде MEL-фильтра. Тем не менее, проверка на тестовых данных показала, что получаемые MFCC-коэффициенты полностью аналогичны тем, что получаются при помощи, например, утилиты sphinx_fe.
В программах sphinxbase вычисление MFCC-коэффициентов производится следующими шагами:
| Шаг | Функция sphinxbase | Суть операции |
|---|---|---|
| 1 | fe_pre_emphasis | Из текущего отсчёта вычитается большая часть предыдущего отсчета (например, 0.97 от его значения). Примитивный фильтр, отбрасывающий нижние частоты. |
| 2 | fe_hamming_window | Окно Хемминга – вносит затухание в начале и конце кадра |
| 3 | fe_fft_real | Быстрое преобразование Фурье |
| 4 | fe_spec2magnitude | Из обычного спектра получаем спектр мощности, теряя фазу |
| 5 | fe_mel_spec | Группируем частоты спектра [например, 256 штук] в 40 кучек, используя MEL-шкалу и весовые коэффициенты |
| 6 | fe_mel_cep | Берём логарифм и применяем DCT2-преобразование к 40 значениям из предыдущего шага. Оставляем первые 13 значений результата. Есть несколько вариантов DCT2 (HTK, legacy, классический), отличающихся константой, на которую мы делим полученные коэффициенты, и особой константой для нулевого коэффициента. Можно выбрать любой вариант, сути это не изменит. |
В эти шаги ещё вклиниваются функции, которые позволяют отделить сигнал от шума и от тишины, типа fe_track_snr, fe_vad_hangover, но нам они не нужны, и отвлекаться на них не будем.
Были выполнены следующие замены для шагов по получению MFCC-коэффициентов:
| Шаг | Функция sphinxbase | Переделка |
|---|---|---|
| 1 | fe_pre_emphasis | cas_pre_emphasis (через frame[i] -= frame[i — 1] * pre_emphasis_alpha;) |
| 2 | fe_hamming_window | for(i=0;i<MM_SOUND_BUFFER_LEN;i++) buf_in[i]*=(0.53836-0.46164*cos(2*3.14159*i/(MM_SOUND_BUFFER_LEN-1))); |
| 3 | fe_fft_real | ippsDFTFwd_RToCCS_32f |
| 4 | fe_spec2magnitude | for(i=0;i<=DFT_SIZE/2;i++) buf_ipp[i]=buf_ipp[i*2]*buf_ipp[i*2]+buf_ipp[i*2+1]*buf_ipp[i*2+1]; |
| 5 | fe_mel_spec | cas_mel_spec (через предрасчитанную таблицу) |
| 6 | fe_mel_cep | CS_mel_cep (через логарифм + ippsDCTFwd_32f_I) |
Что же дальше? У нас есть вектор 13-мерного пространства. Как определить, к какому звуку он относится?
Задача №3. Проверка того, что произносится один из 6 запомненных звуков
В программе-оригинале «Vocal Joystick» для классификации использовался многослойный персептрон (MLP) – нейронная сеть без новомодных наворотов. Давайте посмотрим, насколько оправдано применение нейронной сети здесь.Вспомним, что делают нейроны в искусственных нейронных сетях.
Если у нейрона N входов, то нейрон делит N-мерное пространство пополам. Рубит гиперплоскостью наотмашь. При этом в одной половине пространства он срабатывает (выдаёт положительный ответ), а в другой – не срабатывает.
Давайте посмотрим на [практически] самый простой вариант – нейрон с двумя входами. Он, естественно, будет делить пополам двумерное пространство.
Пусть на вход подаются значения X1 и X2, которые нейрон умножает на весовые коэффициенты W1 и W2, и добавляет свободный член C.
Y=X1*W1+X2*W2+C
(опустим пока тонкости про сигмоидальные функции)
Считаем, что нейрон срабатывает, когда Y>0. Прямая, заданная уравнением 0=X1*W1+X2*W2+C как раз и делит пространство на часть, где Y>0, и часть, где Y<0.
Проиллюстрируем сказанное конкретными числами.
Пусть W1=1, W2=1, C=-5;
Теперь посмотрим, как нам организовать нейронную сеть, которая бы срабатывала на некоторой области пространства, условно говоря – пятне, и не срабатывала во всех остальных местах.Из рисунка видно, что для того, чтобы очертить область в двумерном пространстве, нам потребуется по меньшей мере 3 прямых, то есть 3 связанных с ними нейрона.
Эти три нейрона мы объединим вместе при помощи ещё одного слоя, получив многослойную нейронную сеть (MLP). А если нам нужно, чтобы нейронная сеть срабатывала в двух областях пространства, то потребуется ещё минимум три нейрона (4,5,6 на рисунках):И тут уж без третьего слоя не обойтись:
А третий слой – это уже почти Deep Learning…
Теперь обратимся за помощью к ещё одному примеру. Пусть наша нейронная сеть должна выдавать положительный ответ на красных точках, и отрицательный – на синих точках. Если бы меня попросили отрезать прямыми красное от синего, то я бы сделал это как-то так: Но нейронная сеть априори не знает, сколько прямых (нейронов) ей понадобится. Этот параметр надо задать перед обучением сети. И делает это человек на основе… интуиции или проб и ошибок.Если мы выберем слишком мало нейронов в первом слое (три, например), то можем получить вот такую нарезку, которая будет давать много ошибок (ошибочная область заштрихована):
Но даже если число нейронов достаточно, в результате тренировки сеть может «не сойтись», то есть достигнуть некоторого стабильного состояния, далёкого от оптимального, когда процент ошибок будет высок. Как вот здесь, верхняя перекладина улеглась на два горба и никуда с них не уйдёт. А под ней большая область, порождающая ошибки: Снова, возможность таких случаев зависит от начальных условий обучения и последовательности обучения, то есть от случайных факторов:— Что ты думаешь, доедет то колесо, если б случилось, в Москву или не доедет?
— А ты как думаешь, сойдётся ента нейронная сеть или не сойдётся?
Есть ещё один неприятный момент, связанный с нейронными сетями. Их «забывчивость».
Если начать скармливать сети только синие точки, и перестать скармливать красные, то она может спокойно отхватить себе кусок красной области, переместив туда свои границы:
Если у нейронных сетей столько недостатков, и человек может провести границы гораздо эффективнее нейронной сети, зачем же их тогда вообще использовать?А есть одна маленькая, но очень существенная деталь.
Я очень хорошо могу отделить красное сердечко от синего фона отрезками прямых в двумерном пространстве.
Я неплохо смогу отделить плоскостями статую Венеры от окружающего её трёхмерного пространства.
Но в четырёхмерном пространстве я не смогу ничего, извините. А в 13-мерном — тем более.
А вот для нейронной сети размерность пространства препятствием не является. Я посмеивался над ней в пространствах малой размерности, но стоило выйти за пределы обыденного, как она меня легко уделала.
Тем не менее вопрос пока открыт – насколько оправдано применение нейронной сети в данной конкретной задаче, учитывая перечисленные выше недостатки нейронных сетей.
Забудем на секунду, что наши MFCC-коэффициенты находятся в 13-мерном пространстве, и представим, что они двумерные, то есть точки на плоскости. Как в этом случае можно было бы отделить один звук от другого?
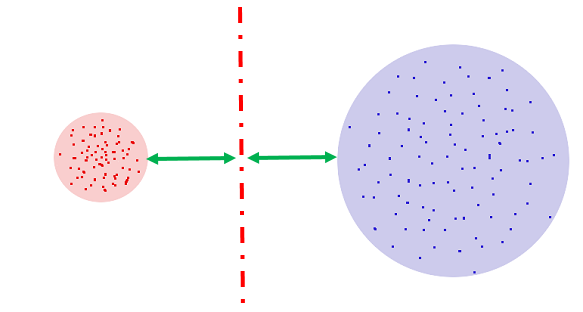
Пусть MFCC-точки звука 1 имеют среднеквадратическое отклонение R1, что [грубо] означает, что точки, не слишком далеко отклоняющиеся от среднего, наиболее характерные точки, находятся внутри круга с радиусом R1. Точно так же точки, которым мы доверяем у звука 2 находятся внутри круга с радиусом R2.
Внимание, вопрос: где провести прямую, которая лучше всего отделяла бы звук 1 от звука 2?Напрашивается ответ: посередине между границами кругов. Возражения есть? Возражений нет.
Исправление: В программе эта граница делит отрезок, соединяющий центры кругов в соотношении R1:R2, так правильнее.
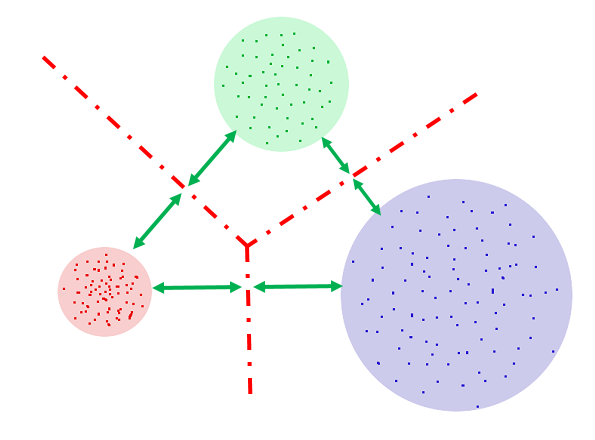
Далее, представим, что звука три. В этом случае проведём границы между каждой парой звуков. И, наконец, не забудем, что где-то в пространстве есть точка, которая является представлением полной тишины в MFCC-пространстве. Нет, это не 13 нулей, как могло бы показаться. Это одна точка, у которой не может быть среднеквадратического отклонения. И прямые, которыми мы отрежем её от наших трёх звуков, можно провести прямо по границам окружностей: На рисунке ниже каждому звуку соответствует кусок пространства своего цвета, и мы можем всегда сказать, к какому звуку относится та или иная точка пространства (или не относится ни к какому): Ну, хорошо, а теперь вспомним, что пространство 13-мерное, и то, что было хорошо рисовать на бумаге, теперь оказывается тем, что не укладывается в человеческом мозгу.Так, да не так. К счастью, в пространстве любой размерности остаются такие понятия, как точка, прямая, [гипер]плоскость, [гипер]сфера.
Мы повторяем все те же действия и в 13-мерном пространстве: находим дисперсию, определяем радиусы [гипер]сфер, соединяем их центры прямой, рубим её [гипер]плоскостью в точке, равно отдалённой от границ [гипер]сфер.
Никакая нейронная сеть не сможет более правильно отделить один звук от другого.
Здесь, правда, следует сделать оговорку. Всё это справедливо, если информация о звуке – это облако точек, отклоняющихся от среднего одинаково во всех направлениях, то есть хорошо вписывающееся в гиперсферу. Если бы это облако было фигурой сложной формы, например, 13-мерной изогнутой сосиской, то все приведённые выше рассуждения были бы не верны. И возможно, при правильном обучении, нейронная сеть смогла бы показать здесь свои сильные стороны.
Но я бы не рисковал. А применил бы, например, наборы нормальных распределений (GMM), (что, кстати и сделано в CMU Sphinx). Всегда приятнее, когда ты понимаешь, какой конкретно алгоритм привёл к получению результата. А не как в нейронной сети: Оракул, на основе своего многочасового варения бульона из данных для тренировки, повелевает вам принять решение, что запрашиваемый звук – это звук №3. (Меня особенно напрягает, когда нейронной сети пытаются доверить управление автомобилем. Как потом в нестандартной ситуации понять, из-за чего машина повернула влево, а не вправо? Всемогущий Нейрон повелел?).
Но наборы нормальных распределений – это уже отдельная большая тема, которая выходит за рамки этой статьи.
Надеюсь, что статья была полезной, и/или заставила ваши мозговые извилины поскрипеть.
Телеграм: t.me/ainewsline
Источник: habrahabr.ru