Глубокое обучение для новичков: распознаем изображения с помощью сверточных сетей
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Разработка ИИГородские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
Атаки на ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Внедрение ИИИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Big data
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Работа разума и сознаниеМодель мозгаРобототехника, БПЛАТрансгуманизмОбработка текстаТеория эволюцииДополненная реальностьЖелезоКиберугрозыНаучный мирИТ индустрияРазработка ПОТеория информацииМатематикаЦифровая экономика
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2016-11-15 14:29
машинное обучение python, архитектура нейронных сетей, Основы нейронных сетей, Нейронные сети для начинающих

Введение
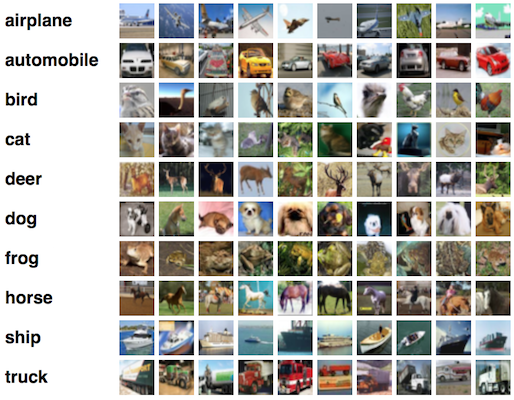
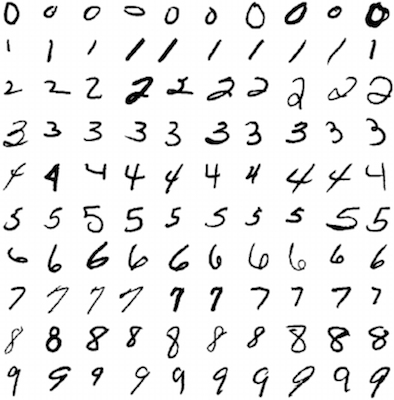
Представляем вторую статью в серии, задуманной, чтобы помочь быстро разобраться в технологии глубокого обучения; мы будем двигаться от базовых принципов к нетривиальным особенностям с целью получить достойную производительность на двух наборах данных: MNIST (классификация рукописных цифр) и CIFAR-10 (классификация небольших изображений по десяти классам: самолет, автомобиль, птица, кошка, олень, собака, лягушка, лошадь, корабль и грузовик).
На прошлом уроке мы ввели базовые понятия глубокого обучения и показали, как можно быстро смоделировать модели нейронных сетей с помощью фреймворка Keras. Напоследок многослойный перцептрон (MLP), содержащий два слоя, применили к MNIST, достигнув уровня точности 98.2%, причем это значение достаточно просто улучшить. Но все же полносвязный перцептрон обычно не выбирают для задач, связанных с распознаванием изображений — в этом случае намного чаще пользуются преимуществами сверточных нейронных сетей (Convolutional Neural Networks, CNN). Пройдя этот курс, вы будете понимать принцип работы и научитесь строить CNN в Keras, достигая хорошего уровня точности на CIFAR-10.
Эта статья предполагает знакомство с предыдущей статьей цикла.
Обработка изображений
Упомянутый выше многослойный перцептрон представляет собой самую мощную и возможных нейронных сетей прямого распространения. Он состоит из нескольких слоем, где каждый слой организован таким образом, что каждый нейрон в одном слое получает свою копию всех выходных данных предыдущего слоя. Эта модель идеально подходит для определенных типов задач, например, обучение на ограниченном количество более или менее неструктурированных параметров.
Тем не менее, посмотрим, что происходит с количеством параметров (весов) в такой модели, когда ей на вход поступают необработанные данные. Например, CIFAR-10 содержит 32 x 32 x 3 цветных изображений, и если мы будем считать каждый канал каждого пикселя независимым входным параметром для MLP, каждый нейрон в первом скрытом слое добавляет к модели около 3000 новых параметров! И с ростом размера изображений ситуация быстро выходит из-под контроля, причем происходит это намного раньше, чем изображения достигают того размера, с которыми обычно работают пользователи реальных приложений.
Одно из популярных решений — понижать разрешение изображений до той степени, когда MLP становится применим. Тем не менее, когда мы просто понижаем разрешение, мы рискуем потерять большое количество информации, и было бы здорово, если бы можно было осуществлять полезную первичную обработку информации еще до применения понижения качества, не вызывая при этом взрывного роста количества параметров модели.
Свертка функций
Оказывается, существует весьма эффективный способ решения этой задачи, который обращает в нашу пользу саму структуру изображения: предполагается, что пиксели, находящиеся близко друг к другу, теснее “взаимодействуют” при формировании интересующего нас признака, чем пиксели, расположенные в противоположных углах. Кроме того, если в процессе классификации изображения небольшая черта считается очень важной, не будет иметь значения, на каком участке изображения эта черта обнаружена.
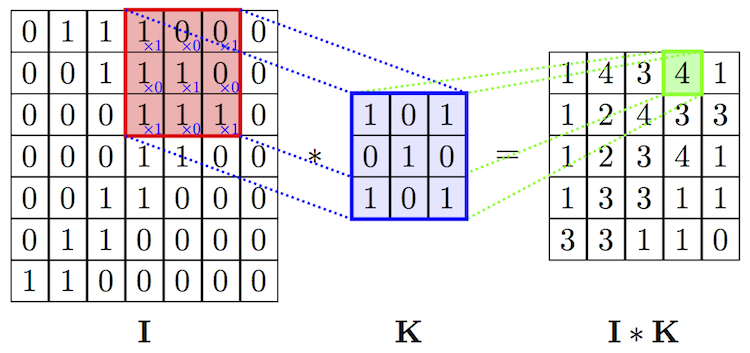
Введем понятие оператора свертки. Имея двумерное изображение I и небольшую матрицу K размерности
На самом деле, точное определение предполагает, что матрица ядра будет транспонирована, но для задач машинного обучения не важно, выполнялась эта операция или нет.
На рисунках ниже схематически изображена вышеуказанная формула, а также представлен результат применения операции свертки (с двумя разными ядрами) к изображению с целью выделить контуры объекта.

Сверточные и субдискретизирующие слои
Оператор свертки составляет основу сверточного слоя (convolutional layer) в CNN. Слой состоит из определенного количества ядер
Обратите внимание, что так как все, что мы здесь делаем — это сложение и масштабирование входных пикселей, ядра можно получить из имеющейся обучающей выборки методом градиентного спуска, аналогично вычислению весов в многослойном перцептроне (MLP). На самом деле MLP мог бы в совершенстве справиться с функциями сверточного слоя, но времени на обучение (как и обучающих данных) потребовалось бы намного больше.
Заметим также, что оператор свертки вовсе не ограничен двухмерными данными: большинство фреймворков глубокого обучения (включая Keras) предоставляют слои для одномерной или трехмерной свертки прямо “из коробки”.
Стоит также отметить, что хотя сверточный слой сокращает количество параметров по сравнению с полносвязным слоем, он использует больше гиперпараметров — параметров, выбираемых до начала обучения.
В частности, выбираются следующие гиперпараметры:
- Глубина (depth) — сколько ядер и коэффициентов смещения будет задействовано в одном слое;
- Высота (height) и ширина (width) каждого ядра;
- Шаг (stride) — на сколько смещается ядро на каждом шаге при вычислении следующего пикселя результирующего изображения. Обычно его принимают равным 1, и чем больше его значение, тем меньше размер выходного изображения;
- Отступ (padding): заметим, что свертка любым ядром размерности более, чем 1х1 уменьшит размер выходного изображения. Так как в общем случае желательно сохранять размер исходного изображения, рисунок дополняется нулями по краям.
Как читатель уже догадался, операции свертки — не единственные операции в CNN (хотя существуют многообещающие исследования на тему “чисто-сверхточных” сетей); они чаще применяются для выделения наиболее полезных признаков перед субдискретизацией (downsampling) и последующей обработкой с помощью MLP.
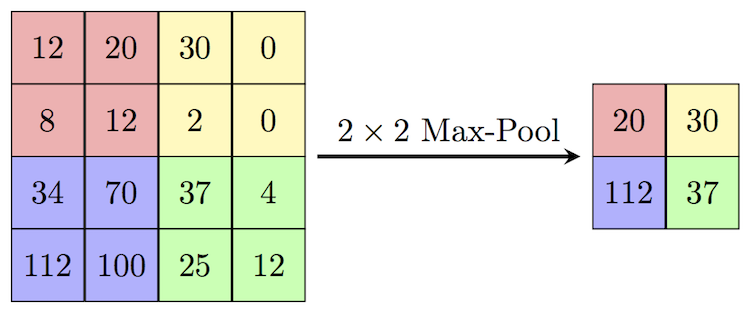
Популярный способ субдискретизации изображения — слой подвыборки (также называемый слоем субдискретизации, по-английски downsampling или pooling layer), который получает на вход маленькие отдельные фрагменты изображения (обычно 2х2) и объединяет каждый фрагмент в одно значение. Существует несколько возможных способов агрегации, наиболее часто из четырех пикселей выбирается максимальный. Этот способ схематически изображен ниже.
Итого: обычная CNN
Теперь, когда у нас есть все строительные блоки, давайте рассмотрим, как выглядит обычная CNN целиком!
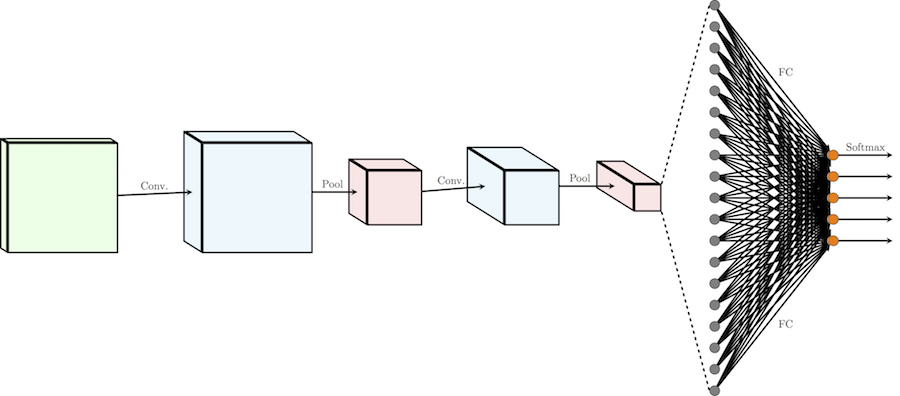
Обычную архитектуру CNN для распределения изображений по k классам можно разделить на две части: цепочка чередующихся слоев свертки/подвыборки
Один проход
Softmax и перекрестная энтропия более подробно рассмотрены на предыдущем уроке. Напомним, что функция softmax превращает вектор действительных чисел в вектор вероятностей (неотрицательные действительные числа, не превышающие 1). В нашем контексте выходные значения являются вероятностями попадания изображения в определённый класс. Минимизация потерь перекрестной энтропии обеспечивает уверенность в определении принадлежности изображения определенному классу, не принимая во внимание вероятность остальных классов, таким образом, для вероятностных задач softmax предпочтительней, чем, например, метод квадратичной ошибки.
Отступление: переобучение, регуляризация и dropout
Впервые (и, надеюсь, только однажды) я обращу ваше внимание на тему, на первый взгляд, не относящуюся к предмету. Она касается очень важного подводного камня глубокого обучения — проблемы переобучения (overfitting). Хотя эта тема будет основной в следующей статье цикла, отрицательный эффект переобучения заметно проявляется на сетях, подобных той, что мы собираемся построить, а значит, необходимо найти способ защититься от этого явления прежде, чем мы пойдем дальше. К счастью, существует очень простой метод, который мы и применим.
Переобучение — это излишне точное соответствие нейронной сети конкретному набору обучающих примеров, при котором сеть теряет способность к обобщению. Другими словами, наша модель могла выучить обучающее множество (вместе с шумом, который в нем присутствует), но она не смогла распознать скрытые процессы, которые это множество породили. В качестве примера рассмотрим задачу аппроксимации синусоиды с аддитивным шумом.
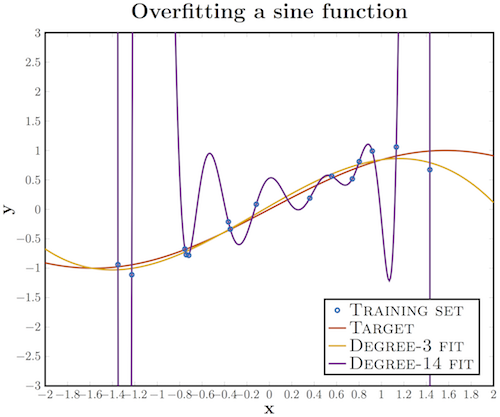
У нас есть обучающее множество (синие кружки), полученное из исходной кривой синуса, с некоторым количеством шума. Если мы приложим к этим данным график многочлена третьей степени, мы получим хорошую аппроксимацию исходной кривой. Кто-то возразит, что многочлен 14-й степени подошел бы лучше; действительно, так как у нас есть 15 точек, такая аппроксимация идеально описала бы обучающую выборку. Тем не менее, в этом случае введение дополнительных параметров в модель приводит к катастрофическим результатам: из-за того, что наша аппроксимация учитывает шумы, она не совпадает с исходной кривой нигде, кроме обучающих точек.
У глубоких сверточных нейронных сетей масса разнообразных параметров, особенно это касается полносвязных слоев. Переобучение может проявить себя в следующей форме: если у нас недостаточно обучающих примеров, маленькая группа нейронов может стать ответственной за большинство вычислений, а остальные нейроны станут избыточны; или наоборот, некоторые нейроны могут нанести ущерб производительности, при этом другие нейроны из их слоя не будут заниматься ничем, кроме исправления их ошибок.
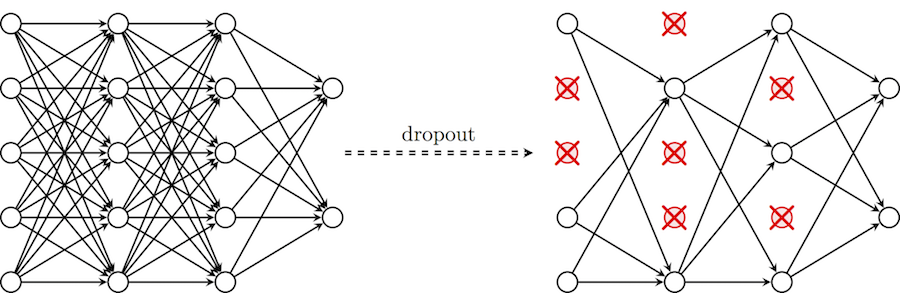
Чтобы помочь нашей сети не утратить способности к обобщению в этих обстоятельствах, мы вводим приемы регуляризации: вместо сокращения количества параметров, мы накладываем ограничения на параметры модели во время обучения, не позволяя нейронам изучать шум обучающих данных. Здесь я опишу прием dropout, который сначала может показаться “черной магией”, но на деле помогает исключить ситуации, описанные выше. В частности, dropout с параметром p за одну итерацию обучения проходит по всем нейронам определенного слоя и с вероятностью p полностью исключает их из сети на время итерации. Это заставит сеть обрабатывать ошибки и не полагаться на существование определенного нейрона (или группы нейронов), а полагаться на “единое мнение” (consensus) нейронов внутри одного слоя. Это довольно простой метод, который эффективно борется с проблемой переобучения сам, без необходимости вводить другие регуляризаторы. Схема ниже иллюстрирует данный метод.
Применение глубокой CNN к CIFAR-10
В качестве практической части построим глубокую сверточную нейронную сеть и применим ее к классификации изображений из набора CIFAR-10.
Импорты те же, что и в прошлый раз, за исключением того что мы используем большее разнообразие слоев:
from keras.datasets import cifar10 # subroutines for fetching the CIFAR-10 dataset from keras.models import Model # basic class for specifying and training a neural network from keras.layers import Input, Convolution2D, MaxPooling2D, Dense, Dropout, Flatten from keras.utils import np_utils # utilities for one-hot encoding of ground truth values import numpy as npUsing Theano backend.Как уже говорилось, обычно CNN использует больше гиперпараметров, чем MLP. В этом руководстве мы все еще будем использовать заранее известные “хорошие” значения, но не будем забывать, что в последующей лекции я расскажу, как их правильно выбирать.
Зададим следующие гиперпараметры:
- batch_size — количество обучающих образцов, обрабатываемых одновременно за одну итерацию алгоритма градиентного спуска;
- num_epochs — количество итераций обучающего алгоритма по всему обучающему множеству;
- kernel_size — размер ядра в сверточных слоях;
- pool_size — размер подвыборки в слоях подвыборки;
- сonv_depth — количество ядер в сверточных слоях;
- drop_prob (dropout probability) — мы будем применять dropout после каждого слоя подвыборки, а также после полносвязного слоя;
- hidden_size — количество нейронов в полносвязном слое MLP.
NB: я задал 200 итераций, что может занять слишком много времени, если в вашем распоряжении нет графического процессора (в этом случае узким местом будут сверточные слои). Если вы собираетесь обучать сеть на CPU, стоит сократить количество итераций и/или ядер.
batch_size = 32 # in each iteration, we consider 32 training examples at once num_epochs = 200 # we iterate 200 times over the entire training set kernel_size = 3 # we will use 3x3 kernels throughout pool_size = 2 # we will use 2x2 pooling throughout conv_depth_1 = 32 # we will initially have 32 kernels per conv. layer... conv_depth_2 = 64 # ...switching to 64 after the first pooling layer drop_prob_1 = 0.25 # dropout after pooling with probability 0.25 drop_prob_2 = 0.5 # dropout in the FC layer with probability 0.5 hidden_size = 512 # the FC layer will have 512 neuronsЗагрузка и первичная обработка CIFAR-10 осуществляется ровно так же, как и загрузка и обработка MNIST, где Keras выполняет все автоматически. Единственное отличие состоит в том, что теперь мы не рассматриваем каждый пиксель как независимое входное значение, и поэтому мы не переносим изображение в одномерное пространство. Мы снова преобразуем интенсивность пикселей так, чтобы она попадала в отрезок [0,1] и используем прямое кодирование для выходных значений.
Тем не менее, в этот раз этот этап будет выполнен для более общего случая, что позволит проще приспосабливаться к новым наборам данных: размер будет не жестко задан, а вычислен из размера набора данных, количество классов будет определено по количеству уникальных меток в обучающем множестве, а нормализация будет выполнена путем деления всех элементов на максимальное значение обучающего множества.
NB: мы также разделим тестовое множество на максимальное значение обучающего множества, потому что нашим алгоритмам не позволено видеть тестовые данные до того как завершится процесс обучения, и поэтому мы не можем вычислять на их основе никакие статистические метрики кроме как применения тех же трансформаций, что происходили с обучающим множеством.
(X_train, y_train), (X_test, y_test) = cifar10.load_data() # fetch CIFAR-10 data num_train, depth, height, width = X_train.shape # there are 50000 training examples in CIFAR-10 num_test = X_test.shape[0] # there are 10000 test examples in CIFAR-10 num_classes = np.unique(y_train).shape[0] # there are 10 image classes X_train = X_train.astype('float32') X_test = X_test.astype('float32') X_train /= np.max(X_train) # Normalise data to [0, 1] range X_test /= np.max(X_train) # Normalise data to [0, 1] range Y_train = np_utils.to_categorical(y_train, num_classes) # One-hot encode the labels Y_test = np_utils.to_categorical(y_test, num_classes) # One-hot encode the labelsНастало время моделирования! Наша сеть будет состоять из четырех слоев
Convolution_2D и слоев MaxPooling2D после второй и четвертой сверток. После первого слоя подвыборки мы удваиваем количество ядер (вместе с описанным выше принципом принесения высоты и ширины в жертву глубине). После этого выходное изображение слоя подвыборки трансформируется в одномерный вектор (слоем Flatten) и проходит два полносвязных слоя (Dense). На всех слоях, кроме выходного полносвязного слоя, используется функция активации ReLU, последний же слой использует softmax.Для регуляризации нашей модели после каждого слоя подвыборки и первого полносвязного слоя применяется слой Dropout. Здесь Keras также выделяется на фоне остальных фреймворков: в нем есть внутренний флаг, который автоматически включает и выключает dropout, в зависимости от того, находится модель в фазе обучения или тестирования.
В остальном спецификация нашей модели совпадает с нашими предыдущими настройками для MNIST:
- Мы используем перекрестную энтропию в качестве функции потерь;
- Мы используем оптимизатор Адама для градиентного спуска;
- Мы измеряем точность модели (так как исходные данные распределены по классам равномерно)*;
- Мы оставляем 10% данных для последующей валидации.
* Чтобы понять, почему точность не подойдет для случаев, когда распределение данных по классам неравномерно, рассмотрим предельный случай, когда 90% тестовых данных принадлежит классу x (например, в задаче диагностики у пациентов редкого заболевания). В этом случае классификатор, который просто выводит x, достигает значительной точности 90%, хотя на деле не выполняет ни обучения, ни обобщения.
inp = Input(shape=(depth, height, width)) # N.B. depth goes first in Keras! # Conv [32] -> Conv [32] -> Pool (with dropout on the pooling layer) conv_1 = Convolution2D(conv_depth_1, kernel_size, kernel_size, border_mode='same', activation='relu')(inp) conv_2 = Convolution2D(conv_depth_1, kernel_size, kernel_size, border_mode='same', activation='relu')(conv_1) pool_1 = MaxPooling2D(pool_size=(pool_size, pool_size))(conv_2) drop_1 = Dropout(drop_prob_1)(pool_1) # Conv [64] -> Conv [64] -> Pool (with dropout on the pooling layer) conv_3 = Convolution2D(conv_depth_2, kernel_size, kernel_size, border_mode='same', activation='relu')(drop_1) conv_4 = Convolution2D(conv_depth_2, kernel_size, kernel_size, border_mode='same', activation='relu')(conv_3) pool_2 = MaxPooling2D(pool_size=(pool_size, pool_size))(conv_4) drop_2 = Dropout(drop_prob_1)(pool_2) # Now flatten to 1D, apply FC -> ReLU (with dropout) -> softmax flat = Flatten()(drop_2) hidden = Dense(hidden_size, activation='relu')(flat) drop_3 = Dropout(drop_prob_2)(hidden) out = Dense(num_classes, activation='softmax')(drop_3) model = Model(input=inp, output=out) # To define a model, just specify its input and output layers model.compile(loss='categorical_crossentropy', # using the cross-entropy loss function optimizer='adam', # using the Adam optimiser metrics=['accuracy']) # reporting the accuracy model.fit(X_train, Y_train, # Train the model using the training set... batch_size=batch_size, nb_epoch=num_epochs, verbose=1, validation_split=0.1) # ...holding out 10% of the data for validation model.evaluate(X_test, Y_test, verbose=1) # Evaluate the trained model on the test set!Посмотреть листинг обучения
Train on 45000 samples, validate on 5000 samples Epoch 1/200 45000/45000 [==============================] - 9s - loss: 1.5435 - acc: 0.4359 - val_loss: 1.2057 - val_acc: 0.5672 Epoch 2/200 45000/45000 [==============================] - 9s - loss: 1.1544 - acc: 0.5886 - val_loss: 0.9679 - val_acc: 0.6566 Epoch 3/200 45000/45000 [==============================] - 8s - loss: 1.0114 - acc: 0.6418 - val_loss: 0.8807 - val_acc: 0.6870 Epoch 4/200 45000/45000 [==============================] - 8s - loss: 0.9183 - acc: 0.6766 - val_loss: 0.7945 - val_acc: 0.7224 Epoch 5/200 45000/45000 [==============================] - 9s - loss: 0.8507 - acc: 0.6994 - val_loss: 0.7531 - val_acc: 0.7400 Epoch 6/200 45000/45000 [==============================] - 9s - loss: 0.8064 - acc: 0.7161 - val_loss: 0.7174 - val_acc: 0.7496 Epoch 7/200 45000/45000 [==============================] - 9s - loss: 0.7561 - acc: 0.7331 - val_loss: 0.7116 - val_acc: 0.7622 Epoch 8/200 45000/45000 [==============================] - 9s - loss: 0.7156 - acc: 0.7476 - val_loss: 0.6773 - val_acc: 0.7670 Epoch 9/200 45000/45000 [==============================] - 9s - loss: 0.6833 - acc: 0.7594 - val_loss: 0.6855 - val_acc: 0.7644 Epoch 10/200 45000/45000 [==============================] - 9s - loss: 0.6580 - acc: 0.7656 - val_loss: 0.6608 - val_acc: 0.7748 Epoch 11/200 45000/45000 [==============================] - 9s - loss: 0.6308 - acc: 0.7750 - val_loss: 0.6854 - val_acc: 0.7730 Epoch 12/200 45000/45000 [==============================] - 9s - loss: 0.6035 - acc: 0.7832 - val_loss: 0.6853 - val_acc: 0.7744 Epoch 13/200 45000/45000 [==============================] - 9s - loss: 0.5871 - acc: 0.7914 - val_loss: 0.6762 - val_acc: 0.7748 Epoch 14/200 45000/45000 [==============================] - 8s - loss: 0.5693 - acc: 0.8000 - val_loss: 0.6868 - val_acc: 0.7740 Epoch 15/200 45000/45000 [==============================] - 9s - loss: 0.5555 - acc: 0.8036 - val_loss: 0.6835 - val_acc: 0.7792 Epoch 16/200 45000/45000 [==============================] - 9s - loss: 0.5370 - acc: 0.8126 - val_loss: 0.6885 - val_acc: 0.7774 Epoch 17/200 45000/45000 [==============================] - 9s - loss: 0.5270 - acc: 0.8134 - val_loss: 0.6604 - val_acc: 0.7866 Epoch 18/200 45000/45000 [==============================] - 9s - loss: 0.5090 - acc: 0.8194 - val_loss: 0.6652 - val_acc: 0.7860 Epoch 19/200 45000/45000 [==============================] - 9s - loss: 0.5066 - acc: 0.8193 - val_loss: 0.6632 - val_acc: 0.7858 Epoch 20/200 45000/45000 [==============================] - 9s - loss: 0.4938 - acc: 0.8248 - val_loss: 0.6844 - val_acc: 0.7872 Epoch 21/200 45000/45000 [==============================] - 9s - loss: 0.4684 - acc: 0.8361 - val_loss: 0.6861 - val_acc: 0.7904 Epoch 22/200 45000/45000 [==============================] - 9s - loss: 0.4696 - acc: 0.8365 - val_loss: 0.6349 - val_acc: 0.7980 Epoch 23/200 45000/45000 [==============================] - 9s - loss: 0.4584 - acc: 0.8387 - val_loss: 0.6592 - val_acc: 0.7926 Epoch 24/200 45000/45000 [==============================] - 9s - loss: 0.4410 - acc: 0.8443 - val_loss: 0.6822 - val_acc: 0.7876 Epoch 25/200 45000/45000 [==============================] - 8s - loss: 0.4404 - acc: 0.8454 - val_loss: 0.7103 - val_acc: 0.7784 Epoch 26/200 45000/45000 [==============================] - 8s - loss: 0.4276 - acc: 0.8512 - val_loss: 0.6783 - val_acc: 0.7858 Epoch 27/200 45000/45000 [==============================] - 8s - loss: 0.4152 - acc: 0.8542 - val_loss: 0.6657 - val_acc: 0.7944 Epoch 28/200 45000/45000 [==============================] - 9s - loss: 0.4107 - acc: 0.8549 - val_loss: 0.6861 - val_acc: 0.7888 Epoch 29/200 45000/45000 [==============================] - 9s - loss: 0.4115 - acc: 0.8548 - val_loss: 0.6634 - val_acc: 0.7996 Epoch 30/200 45000/45000 [==============================] - 9s - loss: 0.4057 - acc: 0.8586 - val_loss: 0.7166 - val_acc: 0.7896 Epoch 31/200 45000/45000 [==============================] - 9s - loss: 0.3992 - acc: 0.8605 - val_loss: 0.6734 - val_acc: 0.7998 Epoch 32/200 45000/45000 [==============================] - 9s - loss: 0.3863 - acc: 0.8637 - val_loss: 0.7263 - val_acc: 0.7844 Epoch 33/200 45000/45000 [==============================] - 9s - loss: 0.3933 - acc: 0.8644 - val_loss: 0.6953 - val_acc: 0.7860 Epoch 34/200 45000/45000 [==============================] - 9s - loss: 0.3838 - acc: 0.8663 - val_loss: 0.7040 - val_acc: 0.7916 Epoch 35/200 45000/45000 [==============================] - 9s - loss: 0.3800 - acc: 0.8674 - val_loss: 0.7233 - val_acc: 0.7970 Epoch 36/200 45000/45000 [==============================] - 9s - loss: 0.3775 - acc: 0.8697 - val_loss: 0.7234 - val_acc: 0.7922 Epoch 37/200 45000/45000 [==============================] - 9s - loss: 0.3681 - acc: 0.8746 - val_loss: 0.6751 - val_acc: 0.7958 Epoch 38/200 45000/45000 [==============================] - 9s - loss: 0.3679 - acc: 0.8732 - val_loss: 0.7014 - val_acc: 0.7976 Epoch 39/200 45000/45000 [==============================] - 9s - loss: 0.3540 - acc: 0.8769 - val_loss: 0.6768 - val_acc: 0.8022 Epoch 40/200 45000/45000 [==============================] - 9s - loss: 0.3531 - acc: 0.8783 - val_loss: 0.7171 - val_acc: 0.7986 Epoch 41/200 45000/45000 [==============================] - 9s - loss: 0.3545 - acc: 0.8786 - val_loss: 0.7164 - val_acc: 0.7930 Epoch 42/200 45000/45000 [==============================] - 9s - loss: 0.3453 - acc: 0.8799 - val_loss: 0.7078 - val_acc: 0.7994 Epoch 43/200 45000/45000 [==============================] - 8s - loss: 0.3488 - acc: 0.8798 - val_loss: 0.7272 - val_acc: 0.7958 Epoch 44/200 45000/45000 [==============================] - 9s - loss: 0.3471 - acc: 0.8797 - val_loss: 0.7110 - val_acc: 0.7916 Epoch 45/200 45000/45000 [==============================] - 9s - loss: 0.3443 - acc: 0.8810 - val_loss: 0.7391 - val_acc: 0.7952 Epoch 46/200 45000/45000 [==============================] - 9s - loss: 0.3342 - acc: 0.8841 - val_loss: 0.7351 - val_acc: 0.7970 Epoch 47/200 45000/45000 [==============================] - 9s - loss: 0.3311 - acc: 0.8842 - val_loss: 0.7302 - val_acc: 0.8008 Epoch 48/200 45000/45000 [==============================] - 9s - loss: 0.3320 - acc: 0.8868 - val_loss: 0.7145 - val_acc: 0.8002 Epoch 49/200 45000/45000 [==============================] - 9s - loss: 0.3264 - acc: 0.8883 - val_loss: 0.7640 - val_acc: 0.7942 Epoch 50/200 45000/45000 [==============================] - 9s - loss: 0.3247 - acc: 0.8880 - val_loss: 0.7289 - val_acc: 0.7948 Epoch 51/200 45000/45000 [==============================] - 9s - loss: 0.3279 - acc: 0.8886 - val_loss: 0.7340 - val_acc: 0.7910 Epoch 52/200 45000/45000 [==============================] - 9s - loss: 0.3224 - acc: 0.8901 - val_loss: 0.7454 - val_acc: 0.7914 Epoch 53/200 45000/45000 [==============================] - 9s - loss: 0.3219 - acc: 0.8916 - val_loss: 0.7328 - val_acc: 0.8016 Epoch 54/200 45000/45000 [==============================] - 9s - loss: 0.3163 - acc: 0.8919 - val_loss: 0.7442 - val_acc: 0.7996 Epoch 55/200 45000/45000 [==============================] - 9s - loss: 0.3071 - acc: 0.8962 - val_loss: 0.7427 - val_acc: 0.7898 Epoch 56/200 45000/45000 [==============================] - 9s - loss: 0.3158 - acc: 0.8944 - val_loss: 0.7685 - val_acc: 0.7920 Epoch 57/200 45000/45000 [==============================] - 8s - loss: 0.3126 - acc: 0.8942 - val_loss: 0.7717 - val_acc: 0.8062 Epoch 58/200 45000/45000 [==============================] - 9s - loss: 0.3156 - acc: 0.8919 - val_loss: 0.6993 - val_acc: 0.7984 Epoch 59/200 45000/45000 [==============================] - 9s - loss: 0.3030 - acc: 0.8970 - val_loss: 0.7359 - val_acc: 0.8016 Epoch 60/200 45000/45000 [==============================] - 9s - loss: 0.3022 - acc: 0.8969 - val_loss: 0.7427 - val_acc: 0.7954 Epoch 61/200 45000/45000 [==============================] - 9s - loss: 0.3072 - acc: 0.8950 - val_loss: 0.7829 - val_acc: 0.7996 Epoch 62/200 45000/45000 [==============================] - 9s - loss: 0.2977 - acc: 0.8996 - val_loss: 0.8096 - val_acc: 0.7958 Epoch 63/200 45000/45000 [==============================] - 9s - loss: 0.3033 - acc: 0.8983 - val_loss: 0.7424 - val_acc: 0.7972 Epoch 64/200 45000/45000 [==============================] - 9s - loss: 0.2985 - acc: 0.9003 - val_loss: 0.7779 - val_acc: 0.7930 Epoch 65/200 45000/45000 [==============================] - 8s - loss: 0.2931 - acc: 0.9004 - val_loss: 0.7302 - val_acc: 0.8010 Epoch 66/200 45000/45000 [==============================] - 8s - loss: 0.2948 - acc: 0.8994 - val_loss: 0.7861 - val_acc: 0.7900 Epoch 67/200 45000/45000 [==============================] - 9s - loss: 0.2911 - acc: 0.9026 - val_loss: 0.7502 - val_acc: 0.7918 Epoch 68/200 45000/45000 [==============================] - 9s - loss: 0.2951 - acc: 0.9001 - val_loss: 0.7911 - val_acc: 0.7820 Epoch 69/200 45000/45000 [==============================] - 9s - loss: 0.2869 - acc: 0.9026 - val_loss: 0.8025 - val_acc: 0.8024 Epoch 70/200 45000/45000 [==============================] - 8s - loss: 0.2933 - acc: 0.9013 - val_loss: 0.7703 - val_acc: 0.7978 Epoch 71/200 45000/45000 [==============================] - 8s - loss: 0.2902 - acc: 0.9007 - val_loss: 0.7685 - val_acc: 0.7962 Epoch 72/200 45000/45000 [==============================] - 9s - loss: 0.2920 - acc: 0.9025 - val_loss: 0.7412 - val_acc: 0.7956 Epoch 73/200 45000/45000 [==============================] - 8s - loss: 0.2861 - acc: 0.9038 - val_loss: 0.7957 - val_acc: 0.8026 Epoch 74/200 45000/45000 [==============================] - 8s - loss: 0.2785 - acc: 0.9069 - val_loss: 0.7522 - val_acc: 0.8002 Epoch 75/200 45000/45000 [==============================] - 9s - loss: 0.2811 - acc: 0.9064 - val_loss: 0.8181 - val_acc: 0.7902 Epoch 76/200 45000/45000 [==============================] - 9s - loss: 0.2841 - acc: 0.9053 - val_loss: 0.7695 - val_acc: 0.7990 Epoch 77/200 45000/45000 [==============================] - 9s - loss: 0.2853 - acc: 0.9061 - val_loss: 0.7608 - val_acc: 0.7972 Epoch 78/200 45000/45000 [==============================] - 9s - loss: 0.2714 - acc: 0.9080 - val_loss: 0.7534 - val_acc: 0.8034 Epoch 79/200 45000/45000 [==============================] - 9s - loss: 0.2797 - acc: 0.9072 - val_loss: 0.7188 - val_acc: 0.7988 Epoch 80/200 45000/45000 [==============================] - 9s - loss: 0.2682 - acc: 0.9110 - val_loss: 0.7751 - val_acc: 0.7954 Epoch 81/200 45000/45000 [==============================] - 9s - loss: 0.2885 - acc: 0.9038 - val_loss: 0.7711 - val_acc: 0.8010 Epoch 82/200 45000/45000 [==============================] - 9s - loss: 0.2705 - acc: 0.9094 - val_loss: 0.7613 - val_acc: 0.8000 Epoch 83/200 45000/45000 [==============================] - 9s - loss: 0.2738 - acc: 0.9095 - val_loss: 0.8300 - val_acc: 0.7944 Epoch 84/200 45000/45000 [==============================] - 9s - loss: 0.2795 - acc: 0.9066 - val_loss: 0.8001 - val_acc: 0.7912 Epoch 85/200 45000/45000 [==============================] - 9s - loss: 0.2721 - acc: 0.9086 - val_loss: 0.7862 - val_acc: 0.8092 Epoch 86/200 45000/45000 [==============================] - 9s - loss: 0.2752 - acc: 0.9087 - val_loss: 0.7331 - val_acc: 0.7942 Epoch 87/200 45000/45000 [==============================] - 9s - loss: 0.2725 - acc: 0.9089 - val_loss: 0.7999 - val_acc: 0.7914 Epoch 88/200 45000/45000 [==============================] - 9s - loss: 0.2644 - acc: 0.9108 - val_loss: 0.7944 - val_acc: 0.7990 Epoch 89/200 45000/45000 [==============================] - 9s - loss: 0.2725 - acc: 0.9106 - val_loss: 0.7622 - val_acc: 0.8006 Epoch 90/200 45000/45000 [==============================] - 9s - loss: 0.2622 - acc: 0.9129 - val_loss: 0.8172 - val_acc: 0.7988 Epoch 91/200 45000/45000 [==============================] - 9s - loss: 0.2772 - acc: 0.9085 - val_loss: 0.8243 - val_acc: 0.8004 Epoch 92/200 45000/45000 [==============================] - 9s - loss: 0.2609 - acc: 0.9136 - val_loss: 0.7723 - val_acc: 0.7992 Epoch 93/200 45000/45000 [==============================] - 9s - loss: 0.2666 - acc: 0.9129 - val_loss: 0.8366 - val_acc: 0.7932 Epoch 94/200 45000/45000 [==============================] - 9s - loss: 0.2593 - acc: 0.9135 - val_loss: 0.8666 - val_acc: 0.7956 Epoch 95/200 45000/45000 [==============================] - 9s - loss: 0.2692 - acc: 0.9100 - val_loss: 0.8901 - val_acc: 0.7954 Epoch 96/200 45000/45000 [==============================] - 8s - loss: 0.2569 - acc: 0.9160 - val_loss: 0.8515 - val_acc: 0.8006 Epoch 97/200 45000/45000 [==============================] - 8s - loss: 0.2636 - acc: 0.9146 - val_loss: 0.8639 - val_acc: 0.7960 Epoch 98/200 45000/45000 [==============================] - 9s - loss: 0.2693 - acc: 0.9113 - val_loss: 0.7891 - val_acc: 0.7916 Epoch 99/200 45000/45000 [==============================] - 9s - loss: 0.2611 - acc: 0.9144 - val_loss: 0.8650 - val_acc: 0.7928 Epoch 100/200 45000/45000 [==============================] - 9s - loss: 0.2589 - acc: 0.9121 - val_loss: 0.8683 - val_acc: 0.7990 Epoch 101/200 45000/45000 [==============================] - 9s - loss: 0.2601 - acc: 0.9142 - val_loss: 0.9116 - val_acc: 0.8030 Epoch 102/200 45000/45000 [==============================] - 9s - loss: 0.2616 - acc: 0.9138 - val_loss: 0.8229 - val_acc: 0.7928 Epoch 103/200 45000/45000 [==============================] - 9s - loss: 0.2603 - acc: 0.9140 - val_loss: 0.8847 - val_acc: 0.7994 Epoch 104/200 45000/45000 [==============================] - 9s - loss: 0.2579 - acc: 0.9150 - val_loss: 0.9079 - val_acc: 0.8004 Epoch 105/200 45000/45000 [==============================] - 8s - loss: 0.2696 - acc: 0.9127 - val_loss: 0.7450 - val_acc: 0.8002 Epoch 106/200 45000/45000 [==============================] - 9s - loss: 0.2555 - acc: 0.9161 - val_loss: 0.8186 - val_acc: 0.7992 Epoch 107/200 45000/45000 [==============================] - 9s - loss: 0.2631 - acc: 0.9160 - val_loss: 0.8686 - val_acc: 0.7920 Epoch 108/200 45000/45000 [==============================] - 9s - loss: 0.2524 - acc: 0.9178 - val_loss: 0.9136 - val_acc: 0.7956 Epoch 109/200 45000/45000 [==============================] - 9s - loss: 0.2569 - acc: 0.9151 - val_loss: 0.8148 - val_acc: 0.7994 Epoch 110/200 45000/45000 [==============================] - 9s - loss: 0.2586 - acc: 0.9150 - val_loss: 0.8826 - val_acc: 0.7984 Epoch 111/200 45000/45000 [==============================] - 9s - loss: 0.2520 - acc: 0.9155 - val_loss: 0.8621 - val_acc: 0.7980 Epoch 112/200 45000/45000 [==============================] - 9s - loss: 0.2586 - acc: 0.9157 - val_loss: 0.8149 - val_acc: 0.8038 Epoch 113/200 45000/45000 [==============================] - 9s - loss: 0.2623 - acc: 0.9151 - val_loss: 0.8361 - val_acc: 0.7972 Epoch 114/200 45000/45000 [==============================] - 9s - loss: 0.2535 - acc: 0.9177 - val_loss: 0.8618 - val_acc: 0.7970 Epoch 115/200 45000/45000 [==============================] - 8s - loss: 0.2570 - acc: 0.9164 - val_loss: 0.7687 - val_acc: 0.8044 Epoch 116/200 45000/45000 [==============================] - 9s - loss: 0.2501 - acc: 0.9183 - val_loss: 0.8270 - val_acc: 0.7934 Epoch 117/200 45000/45000 [==============================] - 8s - loss: 0.2535 - acc: 0.9182 - val_loss: 0.7861 - val_acc: 0.7986 Epoch 118/200 45000/45000 [==============================] - 9s - loss: 0.2507 - acc: 0.9184 - val_loss: 0.8203 - val_acc: 0.7996 Epoch 119/200 45000/45000 [==============================] - 9s - loss: 0.2530 - acc: 0.9173 - val_loss: 0.8294 - val_acc: 0.7904 Epoch 120/200 45000/45000 [==============================] - 9s - loss: 0.2599 - acc: 0.9160 - val_loss: 0.8458 - val_acc: 0.7902 Epoch 121/200 45000/45000 [==============================] - 9s - loss: 0.2483 - acc: 0.9164 - val_loss: 0.7573 - val_acc: 0.7976 Epoch 122/200 45000/45000 [==============================] - 8s - loss: 0.2492 - acc: 0.9190 - val_loss: 0.8435 - val_acc: 0.8012 Epoch 123/200 45000/45000 [==============================] - 9s - loss: 0.2528 - acc: 0.9179 - val_loss: 0.8594 - val_acc: 0.7964 Epoch 124/200 45000/45000 [==============================] - 9s - loss: 0.2581 - acc: 0.9173 - val_loss: 0.9037 - val_acc: 0.7944 Epoch 125/200 45000/45000 [==============================] - 8s - loss: 0.2404 - acc: 0.9212 - val_loss: 0.7893 - val_acc: 0.7976 Epoch 126/200 45000/45000 [==============================] - 8s - loss: 0.2492 - acc: 0.9177 - val_loss: 0.8679 - val_acc: 0.7982 Epoch 127/200 45000/45000 [==============================] - 8s - loss: 0.2483 - acc: 0.9196 - val_loss: 0.8894 - val_acc: 0.7956 Epoch 128/200 45000/45000 [==============================] - 9s - loss: 0.2539 - acc: 0.9176 - val_loss: 0.8413 - val_acc: 0.8006 Epoch 129/200 45000/45000 [==============================] - 8s - loss: 0.2477 - acc: 0.9184 - val_loss: 0.8151 - val_acc: 0.7982 Epoch 130/200 45000/45000 [==============================] - 9s - loss: 0.2586 - acc: 0.9188 - val_loss: 0.8173 - val_acc: 0.7954 Epoch 131/200 45000/45000 [==============================] - 9s - loss: 0.2498 - acc: 0.9189 - val_loss: 0.8539 - val_acc: 0.7996 Epoch 132/200 45000/45000 [==============================] - 9s - loss: 0.2426 - acc: 0.9190 - val_loss: 0.8543 - val_acc: 0.7952 Epoch 133/200 45000/45000 [==============================] - 9s - loss: 0.2460 - acc: 0.9185 - val_loss: 0.8665 - val_acc: 0.8008 Epoch 134/200 45000/45000 [==============================] - 9s - loss: 0.2436 - acc: 0.9216 - val_loss: 0.8933 - val_acc: 0.7950 Epoch 135/200 45000/45000 [==============================] - 8s - loss: 0.2468 - acc: 0.9203 - val_loss: 0.8270 - val_acc: 0.7940 Epoch 136/200 45000/45000 [==============================] - 9s - loss: 0.2479 - acc: 0.9194 - val_loss: 0.8365 - val_acc: 0.8052 Epoch 137/200 45000/45000 [==============================] - 9s - loss: 0.2449 - acc: 0.9206 - val_loss: 0.7964 - val_acc: 0.8018 Epoch 138/200 45000/45000 [==============================] - 9s - loss: 0.2440 - acc: 0.9220 - val_loss: 0.8784 - val_acc: 0.7914 Epoch 139/200 45000/45000 [==============================] - 9s - loss: 0.2485 - acc: 0.9198 - val_loss: 0.8259 - val_acc: 0.7852 Epoch 140/200 45000/45000 [==============================] - 9s - loss: 0.2482 - acc: 0.9204 - val_loss: 0.8954 - val_acc: 0.7960 Epoch 141/200 45000/45000 [==============================] - 9s - loss: 0.2344 - acc: 0.9249 - val_loss: 0.8708 - val_acc: 0.7874 Epoch 142/200 45000/45000 [==============================] - 9s - loss: 0.2476 - acc: 0.9204 - val_loss: 0.9190 - val_acc: 0.7954 Epoch 143/200 45000/45000 [==============================] - 9s - loss: 0.2415 - acc: 0.9223 - val_loss: 0.9607 - val_acc: 0.7960 Epoch 144/200 45000/45000 [==============================] - 9s - loss: 0.2377 - acc: 0.9232 - val_loss: 0.8987 - val_acc: 0.7970 Epoch 145/200 45000/45000 [==============================] - 9s - loss: 0.2481 - acc: 0.9201 - val_loss: 0.8611 - val_acc: 0.8048 Epoch 146/200 45000/45000 [==============================] - 9s - loss: 0.2504 - acc: 0.9197 - val_loss: 0.8411 - val_acc: 0.7938 Epoch 147/200 45000/45000 [==============================] - 9s - loss: 0.2450 - acc: 0.9216 - val_loss: 0.7839 - val_acc: 0.8028 Epoch 148/200 45000/45000 [==============================] - 9s - loss: 0.2327 - acc: 0.9250 - val_loss: 0.8910 - val_acc: 0.8054 Epoch 149/200 45000/45000 [==============================] - 9s - loss: 0.2432 - acc: 0.9219 - val_loss: 0.8568 - val_acc: 0.8000 Epoch 150/200 45000/45000 [==============================] - 9s - loss: 0.2436 - acc: 0.9236 - val_loss: 0.9061 - val_acc: 0.7938 Epoch 151/200 45000/45000 [==============================] - 9s - loss: 0.2434 - acc: 0.9222 - val_loss: 0.8439 - val_acc: 0.7986 Epoch 152/200 45000/45000 [==============================] - 9s - loss: 0.2439 - acc: 0.9225 - val_loss: 0.9002 - val_acc: 0.7994 Epoch 153/200 45000/45000 [==============================] - 8s - loss: 0.2373 - acc: 0.9237 - val_loss: 0.8756 - val_acc: 0.7880 Epoch 154/200 45000/45000 [==============================] - 8s - loss: 0.2359 - acc: 0.9238 - val_loss: 0.8514 - val_acc: 0.7936 Epoch 155/200 45000/45000 [==============================] - 9s - loss: 0.2435 - acc: 0.9222 - val_loss: 0.8377 - val_acc: 0.8080 Epoch 156/200 45000/45000 [==============================] - 9s - loss: 0.2478 - acc: 0.9204 - val_loss: 0.8831 - val_acc: 0.7992 Epoch 157/200 45000/45000 [==============================] - 9s - loss: 0.2337 - acc: 0.9253 - val_loss: 0.8453 - val_acc: 0.7994 Epoch 158/200 45000/45000 [==============================] - 9s - loss: 0.2336 - acc: 0.9257 - val_loss: 0.9027 - val_acc: 0.7882 Epoch 159/200 45000/45000 [==============================] - 9s - loss: 0.2384 - acc: 0.9230 - val_loss: 0.9121 - val_acc: 0.8016 Epoch 160/200 45000/45000 [==============================] - 9s - loss: 0.2481 - acc: 0.9217 - val_loss: 0.9495 - val_acc: 0.7974 Epoch 161/200 45000/45000 [==============================] - 9s - loss: 0.2450 - acc: 0.9224 - val_loss: 0.8510 - val_acc: 0.7884 Epoch 162/200 45000/45000 [==============================] - 9s - loss: 0.2433 - acc: 0.9220 - val_loss: 0.8979 - val_acc: 0.7948 Epoch 163/200 45000/45000 [==============================] - 9s - loss: 0.2339 - acc: 0.9262 - val_loss: 0.8979 - val_acc: 0.7978 Epoch 164/200 45000/45000 [==============================] - 9s - loss: 0.2298 - acc: 0.9257 - val_loss: 0.9036 - val_acc: 0.7990 Epoch 165/200 45000/45000 [==============================] - 9s - loss: 0.2404 - acc: 0.9236 - val_loss: 0.8341 - val_acc: 0.8052 Epoch 166/200 45000/45000 [==============================] - 9s - loss: 0.2402 - acc: 0.9227 - val_loss: 0.8731 - val_acc: 0.7996 Epoch 167/200 45000/45000 [==============================] - 9s - loss: 0.2367 - acc: 0.9250 - val_loss: 0.9218 - val_acc: 0.7992 Epoch 168/200 45000/45000 [==============================] - 9s - loss: 0.2267 - acc: 0.9262 - val_loss: 0.8767 - val_acc: 0.7922 Epoch 169/200 45000/45000 [==============================] - 9s - loss: 0.2336 - acc: 0.9254 - val_loss: 0.8418 - val_acc: 0.8038 Epoch 170/200 45000/45000 [==============================] - 9s - loss: 0.2434 - acc: 0.9232 - val_loss: 0.8362 - val_acc: 0.7920 Epoch 171/200 45000/45000 [==============================] - 9s - loss: 0.2328 - acc: 0.9265 - val_loss: 0.8712 - val_acc: 0.7950 Epoch 172/200 45000/45000 [==============================] - 9s - loss: 0.2346 - acc: 0.9262 - val_loss: 0.9256 - val_acc: 0.7976 Epoch 173/200 45000/45000 [==============================] - 8s - loss: 0.2382 - acc: 0.9242 - val_loss: 0.8875 - val_acc: 0.7982 Epoch 174/200 45000/45000 [==============================] - 9s - loss: 0.2400 - acc: 0.9239 - val_loss: 0.8264 - val_acc: 0.7864 Epoch 175/200 45000/45000 [==============================] - 9s - loss: 0.2334 - acc: 0.9261 - val_loss: 0.9178 - val_acc: 0.8014 Epoch 176/200 45000/45000 [==============================] - 9s - loss: 0.2427 - acc: 0.9219 - val_loss: 0.8458 - val_acc: 0.7920 Epoch 177/200 45000/45000 [==============================] - 9s - loss: 0.2310 - acc: 0.9257 - val_loss: 0.9171 - val_acc: 0.8062 Epoch 178/200 45000/45000 [==============================] - 9s - loss: 0.2310 - acc: 0.9265 - val_loss: 0.8544 - val_acc: 0.7990 Epoch 179/200 45000/45000 [==============================] - 9s - loss: 0.2378 - acc: 0.9240 - val_loss: 0.9259 - val_acc: 0.8000 Epoch 180/200 45000/45000 [==============================] - 9s - loss: 0.2381 - acc: 0.9242 - val_loss: 0.8573 - val_acc: 0.8056 Epoch 181/200 45000/45000 [==============================] - 9s - loss: 0.2231 - acc: 0.9297 - val_loss: 0.8935 - val_acc: 0.8002 Epoch 182/200 45000/45000 [==============================] - 9s - loss: 0.2419 - acc: 0.9248 - val_loss: 1.0145 - val_acc: 0.7900 Epoch 183/200 45000/45000 [==============================] - 9s - loss: 0.2336 - acc: 0.9266 - val_loss: 0.8838 - val_acc: 0.8006 Epoch 184/200 45000/45000 [==============================] - 9s - loss: 0.2429 - acc: 0.9242 - val_loss: 0.8685 - val_acc: 0.7918 Epoch 185/200 45000/45000 [==============================] - 9s - loss: 0.2317 - acc: 0.9260 - val_loss: 0.8297 - val_acc: 0.7942 Epoch 186/200 45000/45000 [==============================] - 9s - loss: 0.2330 - acc: 0.9264 - val_loss: 0.8831 - val_acc: 0.8026 Epoch 187/200 45000/45000 [==============================] - 9s - loss: 0.2353 - acc: 0.9254 - val_loss: 0.8934 - val_acc: 0.7956 Epoch 188/200 45000/45000 [==============================] - 9s - loss: 0.2312 - acc: 0.9247 - val_loss: 0.9275 - val_acc: 0.8042 Epoch 189/200 45000/45000 [==============================] - 9s - loss: 0.2239 - acc: 0.9282 - val_loss: 0.9246 - val_acc: 0.7934 Epoch 190/200 45000/45000 [==============================] - 9s - loss: 0.2349 - acc: 0.9253 - val_loss: 0.8628 - val_acc: 0.8000 Epoch 191/200 45000/45000 [==============================] - 9s - loss: 0.2313 - acc: 0.9266 - val_loss: 0.9020 - val_acc: 0.7978 Epoch 192/200 45000/45000 [==============================] - 9s - loss: 0.2358 - acc: 0.9254 - val_loss: 0.9481 - val_acc: 0.7966 Epoch 193/200 45000/45000 [==============================] - 9s - loss: 0.2298 - acc: 0.9276 - val_loss: 0.8791 - val_acc: 0.8010 Epoch 194/200 45000/45000 [==============================] - 9s - loss: 0.2279 - acc: 0.9265 - val_loss: 0.8890 - val_acc: 0.7976 Epoch 195/200 45000/45000 [==============================] - 9s - loss: 0.2330 - acc: 0.9273 - val_loss: 0.8893 - val_acc: 0.7890 Epoch 196/200 45000/45000 [==============================] - 9s - loss: 0.2416 - acc: 0.9243 - val_loss: 0.9002 - val_acc: 0.7922 Epoch 197/200 45000/45000 [==============================] - 9s - loss: 0.2309 - acc: 0.9273 - val_loss: 0.9232 - val_acc: 0.7990 Epoch 198/200 45000/45000 [==============================] - 9s - loss: 0.2247 - acc: 0.9278 - val_loss: 0.9474 - val_acc: 0.7980 Epoch 199/200 45000/45000 [==============================] - 9s - loss: 0.2335 - acc: 0.9256 - val_loss: 0.9177 - val_acc: 0.8000 Epoch 200/200 45000/45000 [==============================] - 9s - loss: 0.2378 - acc: 0.9254 - val_loss: 0.9205 - val_acc: 0.7966 9984/10000 [============================>.] - ETA: 0s [0.97292723369598388, 0.7853]Наша модель достигает точности около 76.6% на тестовом множестве; для такой сложной задачи, где даже человеческий взгляд показывает точность всего около 90%, а также учитывая относительную простоту модели, это вполне достойный результат. Тем не менее, более сложные модели в последних исследованиях достигали точности 96.53%.
Полагаю, что тонкая настройка модели, если в вашем распоряжении нет графического процессора, будет крайне затруднительна. Тем не менее, советую вам попробовать применить эту модель к набору MNIST с прошлого урока; на CNN с dropout’ом у вас почти без усилий должно получиться достигнуть точности 99.3%.
Заключение
Сегодня мы изучили базовые понятия сверточных нейронных сетей, рассмотрели проблему переобучения и выяснили в общих чертах, как ее решают с помощью регуляризации (в частности, методом dropout), а также успешно построили четырехслойную глубокую CNN в Keras, протестировав ее на CIFAR-10 и уложившись в 50 строк кода.
В следующий раз мы рассмотрим сразу несколько тем, изучим приемы и хитрости, связанные с тонкой настройкой моделей, достижения максимальной производительности и контролем за переобучением.
Телеграм: t.me/ainewsline
Источник: habrahabr.ru