Гибридный робот на основе насекомого с изменяемой скоростью и походкой (+ видео) | Robogeek.Ru
МЕНЮ
Главная страница
Поиск
Регистрация на сайте
Помощь проекту
Архив новостей
ТЕМЫ
Новости ИИ
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Искусственный интеллект
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Нейронные сети начинающим
Психология ИИ
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Промпты. Генеративные запросы
Распознавание лиц
Распознавание образов
Распознавание речи
Творчество ИИ
Техническое зрение
Чат-боты
Авторизация
2016-04-08 00:47

В природе, оказывается, есть готовые к использованию роботизированные платформы. Новое исследование ученых Наньянского технологического университета в Сингапуре позволяет им возомнить себя Господом Богом с их достижением в управлении насекомыми. Конечно, подобное исследование имеет также огромное значение для науки, начиная с энтомологии и нейробиологии до искусства протезирования.
В докладе, опубликованном в среду, описывается система для управления нервной системой насекомых, которая выходит далеко за рамки роботов, подобных Roboroach и других более научных исследований. Насколько известно, этот документ представляет собой первую систему управления живым насекомым с настраиваемой походкой, длиной шага и скоростью ходьбы.
В предыдущей работе использовались тараканы и пауки, которых можно было заставлять быстрее двигаться и даже управлять их перемещением. Но с использованием принципа управления более высокого уровня, вызывающего непреодолимое желание идти вперед, вместо того, чтобы заставлять конечности двигаться по собственному желанию, новое исследование успешно демонстрирует последний принцип, хотя и в несколько ограниченных масштабах.
Гигантский жук Mecynorhina torquata имеет огромный корпус, что упрощает крепления к нему проводов. Команда впервые тщательно исследовала мышцы и закономерности их натяжения, связанные с различными видами движения, используя современную технологию захвата движения и доброе старое рассечение. Затем подключили к этим мышцам провода и стимулировали их сигналами с широтно-импульсной модуляцией, генерируемыми на соседнем микроконтроллере (но не на жуке).
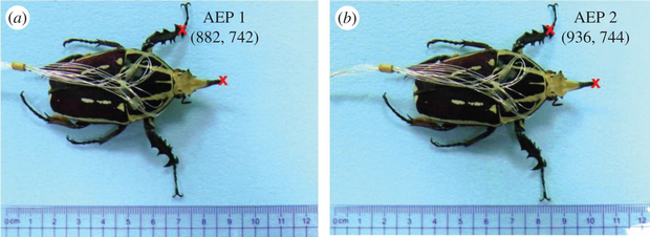
Только две передних ноги были подключены для целей этого эксперимента с ограниченными возможностями перемещения, но исследователи отмечают, что в природе и шестиногие существа используют двуногую походку. Процесс иннервации мышц ног с предустановленными ритмами был очень успешным, пишут исследователи. А успешные результаты в более традиционных областях поведения насекомых и анатомии также показали жизнеспособность этой технологии в создании гибридных роботов на основе насекомых и компьютерной системы.
Такие химеры имеют ряд преимуществ по сравнению с рукотворными роботами такого же размера. Выдающейся инновацией представляется использование ног насекомых вместо 3D-печатных или питание гибридных имплантатов от энергии самого животного.
Это, конечно, выглядит жутковато. Но это также глубоко захватывающее исследование и в высшей степени практичное. Исследования уже идут полным ходом, чтобы оборудовать тараканов направленными микрофонами и блоками слежения, которые позволят им перемещаться в зоне бедствия, вынуждая двигаться по направлению к звукам, исходящим от людей в завалах. И зачем тогда использовать беспилотник за $10000, когда эту работу будет делать стрекоза за $100 с вживленным в ее нервную систему управлением?
Без сомнения, последняя возможность является привлекательной для глубинных исследований таких учреждений, как DARPA, поэтому они почти наверняка уже привлекают к сотрудничеству занимающихся подобными технологиями специалистов.
Телеграм: t.me/ainewsline
Источник: www.robo-geek.ru