CAVIN: алгоритм для планирования многоступенчатых задач
МЕНЮ
Искусственный интеллект
Поиск
Регистрация на сайте
Помощь проекту
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Техническое зрение
Чат-боты
Авторизация
2019-11-02 09:00

Исследователи из Stanford разработали модель для решения многоступенчатых задач. CAVIN выдает последовательность действий для целевой задачи. Чтобы оценить работу модели, алгоритм встроили в робота. Роботу дали решать три задачи: уборка, вставка и перенос целевых предметов. CAVIN обходит state-of-the-art нейросетевые подходы для планирования. Детальный обзор работы алгоритма доступен по ссылке.

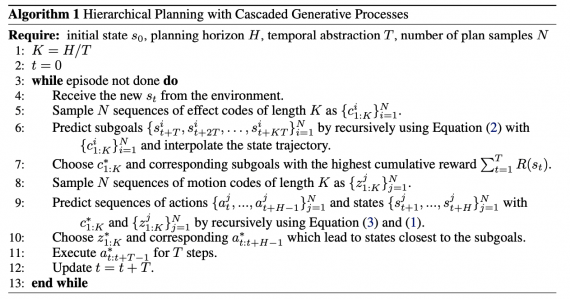
Основной проблемой планирования для многоступенчатых задач — это поиск эффективного набора действий для решения задачи. Исследователи представили алгоритм Cascaded Variational Inference (CAVIN) Planner. CAVIN иерархически генерирует планы действий через семплирование из пространства скрытых представлений. Чтобы облегчить планирование на длительные временные промежутки, модель выучивает скрытые представления. Использование таких позволяет разделить предсказание высокоуровневых действий от генерации низкоуровневых движений через cascaded variational inference. Такая архитектура позволяет моделировать последовательность действий на двух разных уровнях.
Иерархическое планирование
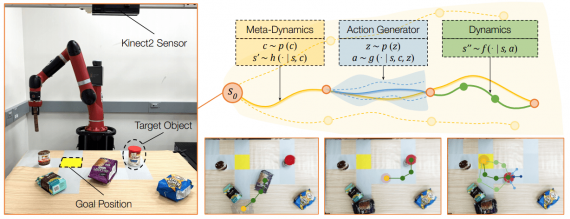
Задачи на управление требуют от робота передвигать целевой класс к целевой позиции через специальные регионы. Ниже на изображении специальные регионы отмечены серым. В случае столкновения с препятствием модель сначала очищает путь, а затем передвигает объект. CAVIN состоит из трех плотно связанных модулей:
- Динамическая модель;
- Метадинамическая модель;
- Генератор действий
Это позволяет иерархически генерировать планы действий для целевой задачи.
Метод сначала предсказывает подзадачи. За это отвечает метадинамическая модель. Затем модель генерирует множество действий. Эту задачу решает генератор действий. Оптимальный план выбирается через предсказание итоговых траекторий отобранных действий. Последнее осуществляется с помощью динамической модели.
Проверка работы алгоритма
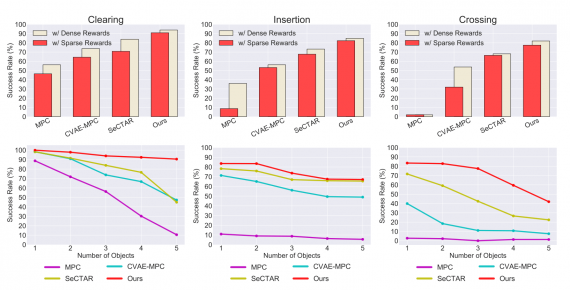
Экспериментальная среда включает в себя робота-руку 7-DoF Sawyer, поверхность стола и сенсор глубины Kinect2. До 5 объектов из датасета YCB случайно располагаются на столе. Робот держит короткую палку как инструмент для взаимодействия с объектами на столе. Роботу даются три задачи:
- расчистить поверхность стола от объектов;
- поместить целевой объект в специальный проем на поверхности стола;
- перенести целевой объект на целевую позицию
Скрытые представления для алгоритма брались из предобученной нейросети PointNet. Работу модели сравнивали с базовыми нейросетевыми подходами для планирования: MPC, CVAEMPC и SeCTAR. Ниже видно, что CAVIN обходит остальные модели на всех трех задачах.
Источник: neurohive.io