«Из нейросетей и палок»: как необычного робота научили ходить
МЕНЮ
Искусственный интеллект
Поиск
Регистрация на сайте
Помощь проекту
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Техническое зрение
Чат-боты
Авторизация
2019-07-05 10:02
Сегодня роботами самых причудливых форм очень сложно удивить. Однако группе ученых из Японии, кажется, это удалось. Они соорудили странных роботов из палок и… других подручных материалов. Более того, благодаря весьма продвинутой системе искусственного интеллекта, построенной на основе нейросетей, робот научился ходить. И как бы странно это ни звучало, но у такого подхода весьма перспективное будущее.

Как создаются роботы
Обычно, при проектировании роботов, ученым необходимо иметь очень четкое представление о том, что робот должен делать, как он будет передвигаться и какие действия ему будет необходимо выполнять. При этом сначала требуется построить прототип будущего устройства для того, чтобы удостовериться, что все их расчеты были правильными и для выявления недостатков конструкции. Но на этом процесс разработки не заканчивается. После формирования понимания о том, как будет функционировать модель, нужно будет «научить» ее тем действиям, которые она должна выполнять, будь то работа в качестве манипулятора, хождение или перемещение иными способами.
Роботы из веток
Но, как заявляют ученые из Токийского университета и компании Preferred Networks, процесс создания робототехники не обязательно должен быть таким сложным. Еще в декабре прошлого года они начали эксперименты по созданию роботов на основе сервоприводов и подручных материалов (например, веток деревьев).
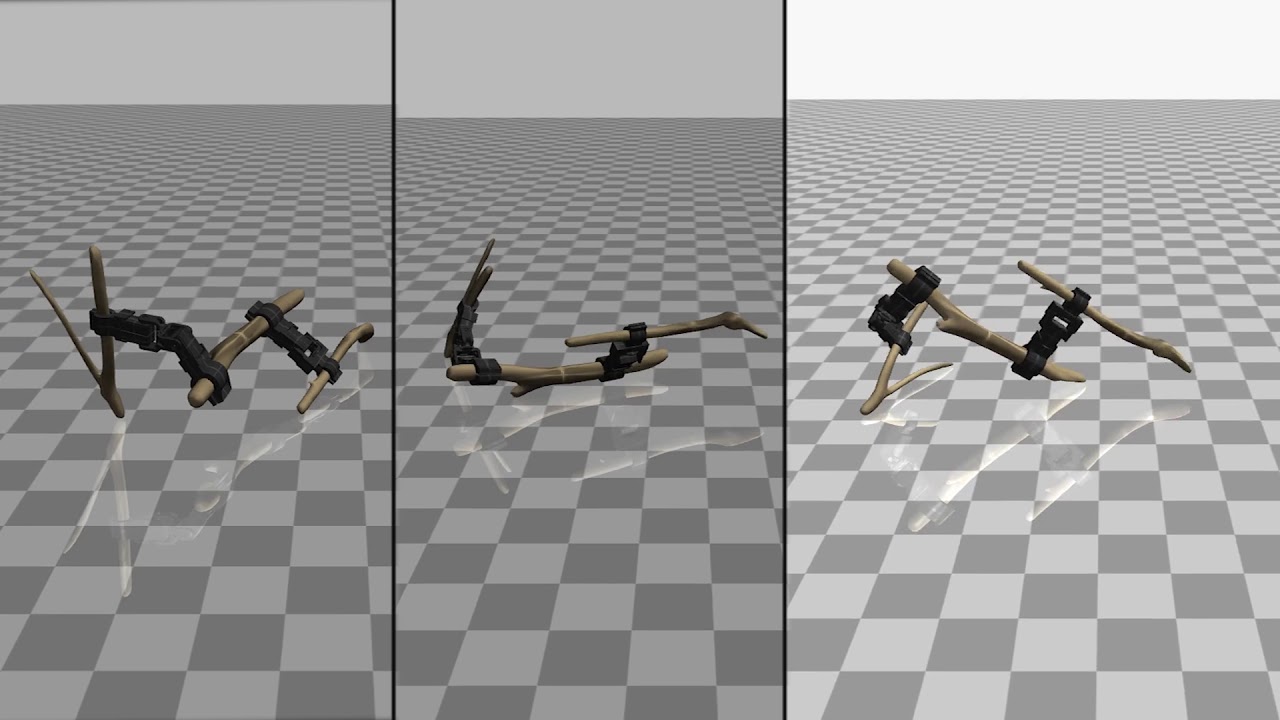
При этом еще до создания модели роботы обучаются перемещению в специальной компьютерной симуляции, где их учит ходить продвинутая нейросеть на основе глубокого машинного обучения. Для того, чтобы загрузить данные о модели в нейросеть, ученые просто берут несколько веток подходящего размера и тело робота. Все это подвергается 3D-сканированию. Получившиеся модели появляются в особой компьютерной программе, которая «собирает» их воедино и начинает процесс обучения.
Во время этих «уроков» задается модель поведения будущего робота. За верные движения нейросеть «вознаграждает» будущий механизм, а за неверные — «наказывает». Кроме того, существует возможность ручной настройки движений, а также система, которая провоцирует возникновение случайных событий во время обучения для того, чтобы робот был максимально подготовлен к тому, что его ждет в реальном мире. Когда обучение заканчивается, остается только собрать модель и загрузить в нее алгоритм поведения.

Зачем создавать таких роботов?
На самом деле, потенциал такой системы просто огромен. По сути, все, что вам нужно — это «компьютер и пара моторчиков». Остальные детали можно собрать прямо у себя под ногами. Такие роботы могут быть использованы для разведки в регионах, куда человеку не добраться, а посылать полноценные механизмы слишком дорого. Кроме того, подобных роботов можно собирать, например, при колонизации других планет. Можно, например, отправить сборочный модуль с запасом микропроцессоров и сервоприводов, а другие детали собрать уже по прибытии на место миссии.
Источник: hi-news.ru