Я геодезист, коллеги из КРОК попросили меня рассказать про то, как мы переделываем дроны, как программируем полёт и как всё потом обрабатываем, превращая снимки, полученные с беспилотника, в детальные ортофотопланы, высокоточные трёхмерные модели местности и топографические планы масштабов 1:500–1:10 000.
Мы с командой попробовали несколько разных дронов и в итоге остановились на «рабочей лошадке» DJI Phantom 4 PRO с несколькими модификациями. Первое и главное, что мы с ним сделали, — это оснастили его геодезическим GNSS-приёмником, который позволяет определять центры фотографирования с сантиметровой точностью.
Стандартный его GPS обеспечивал точность порядка 15–20 метров. Для решения геодезических задач при такой точности нужны либо специальные кресты на земле, либо ещё какое-нибудь извращение вроде раскладывания бумажных тарелок по известным координатам. Мы делаем и проще, и сложнее: ставим наземную базовую станцию с точно известными координатами, и интегрируем в дрон дополнительный GNSS-приемник и устанавливаем внешнюю антенну. Например, начинали мы с MATRICE 600 c установленной на борту D-RTK системой фирмы DJI, которая была очень громоздкой, дорогой и не удобной для решения геодезических задач. Потом мы переделали более компактный DJI PHANTOM 4 PRO: удалось интегрировать дополнительное GNSS-оборудование в стандартный корпус. Общая масса беспилотника увеличилась примерно на 100 граммов. Время полёта немного пострадало, но некритично: набора из четырёх батарей хватает для выполнения съемки площадью 200–300 Га.
Фантом дал одну важную возможность — основной набор стал умещаться в ручную кладь пассажирского самолёта. То есть мы можем теперь возить весь комплект оборудования с собой куда угодно очень и очень просто.
Минимальный набор — модифицированный дрон (весь его комплект), геодезический GNSS -приёмник в качестве наземной базовой станции, ноутбук с программой планирования полётов, скачанной картой (для работы без Интернета) и прописанным под точку планом полётов, если была такая возможность заранее. Ещё нужны дополнительные батареи, зарядное устройство (или несколько) и генератор. Мы берём бензиновый генератор, который выполнен в виде кейса, он очень удобен для наших нужд. Либо инвертор для питания от двигателя автомобиля. Для некоторых регионов надо брать ещё обогрев (в частности, для аккумуляторов и рук).
С одного аккумулятора можно отснять 50 Га с разрешением 2–5 сантиметров на пиксель.
Работаем так: приезжаем на место с подробно прописанным заранее (в офисе) заданием для дрона. Мы используем UgCS (это профессиональный довольно дорогой софт для планирования полётов дронов, который в России продаёт и консультирует по интеграции и доработкам КРОК. Конечно, такой софт применим не только в геодезии, им могут пользоваться спасатели, агрономы, строители и т. п., но в этих областях я не силён, поэтому все вопросы — к коллегам из КРОК). В нём мы указываем границы района работ, поперечное перекрытие, высоту фотографирования, и дальше ПО само рассчитает маршрут полёта дрона с учетом особенностей рельефа местности. То есть UgCS нарезает всё как надо: с промежуточными посадками для замены батарей и остальным.
Смотрим, нет ли каких-то неучтённых препятствий, затем ставим базовую станцию GNSS. Координаты наземных точек уточняются приёмником Topcon GR-5.
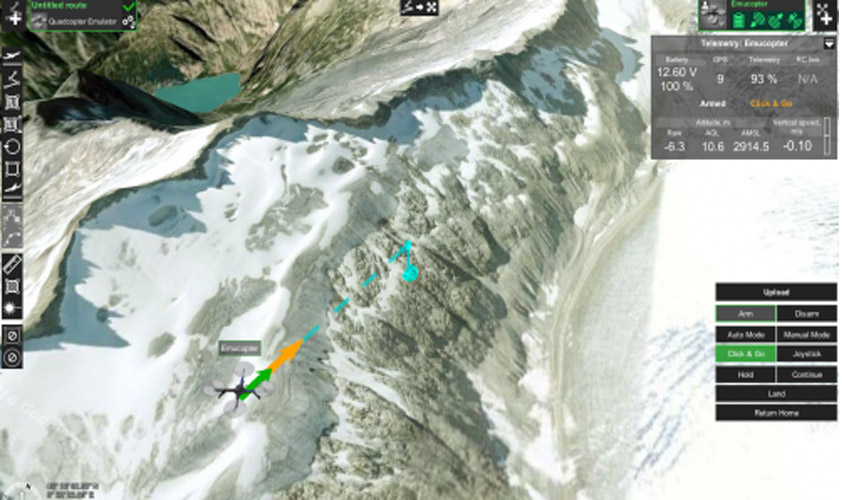
Дальше уже есть полётное задание. Вот границы зоны облёта и продольное или поперечное перекрытие для склейки. Ставим пару контрольных контрастных точек для контроля: Чтобы подключить автопилот из GNSS, мы соединяем дрон с пультом, пульт — с планшетом с управляющей программой DJI, а затем планшет — с ноутбуком. Настроить эту связку с ходу непросто. Тут мне существенно помогли коллеги из КРОК: установить, подогнать, протестить до запуска. Следующий момент в том, что примерно каждый третий объект находится там, где нет стабильного доступа в Интернет. С этим софт справляется. Но бывают и сложные участки, например, горы, где уже начинаются проблемы с распространением сигнала. Именно поэтому мы используем Фантомы: у них есть множество встроенных датчиков для обхода препятствий. Когда он теряет связь, то возвращается назад. Когда не может вернуться назад, то начинает садиться. И эти датчики помогают летать в сложных условиях, таких, как горная местность или в городе. У нас было несколько случаев, когда датчики препятствий помогли избежать аварийной ситуации. Например, в горах эмирата Фуджейра (ОАЭ) мы потеряли связь с дроном, и из-за ветра беспилотник не смог вернуться на точку взлёта. Тогда автопилот принял решение о посадке и по датчикам препятствия посадил дрон в расщелину между двумя склонами горного массива на сравнительно ровную площадку.
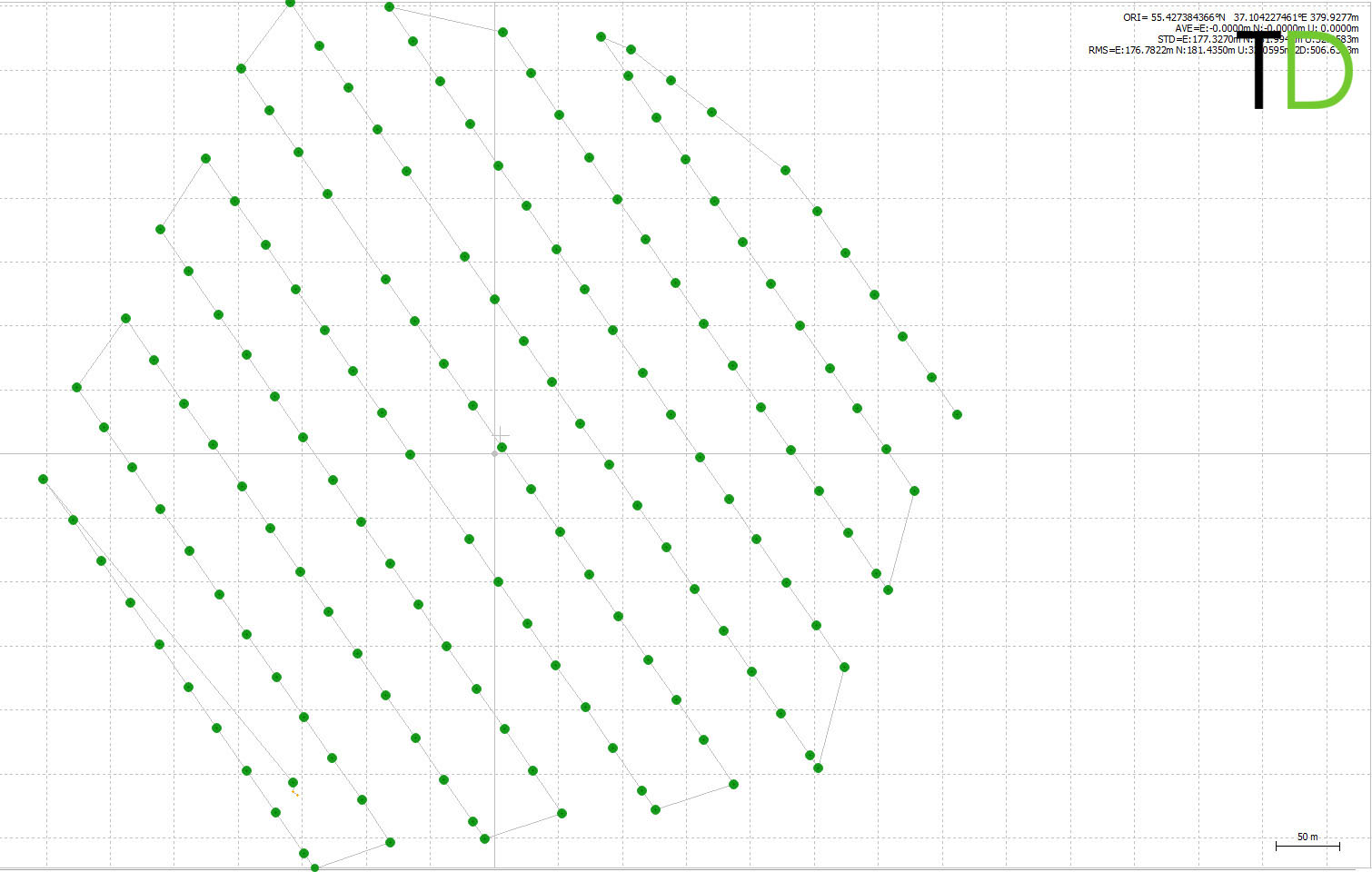
Итог полёта дрона — фотографии вот в этих точках (это софт для обработки уже выделяет их центры): Данные GNSS-измерений скачиваются по Wi-Fi отдельно после завершения полёта, они хранятся на дроне и не транслируются на землю в реальном времени. Дальше можно уезжать, потому что следующий шаг — фотограмметрическая обработка материалов аэрофотосъёмки. Координаты наземных опорных точек используются только для контроля:
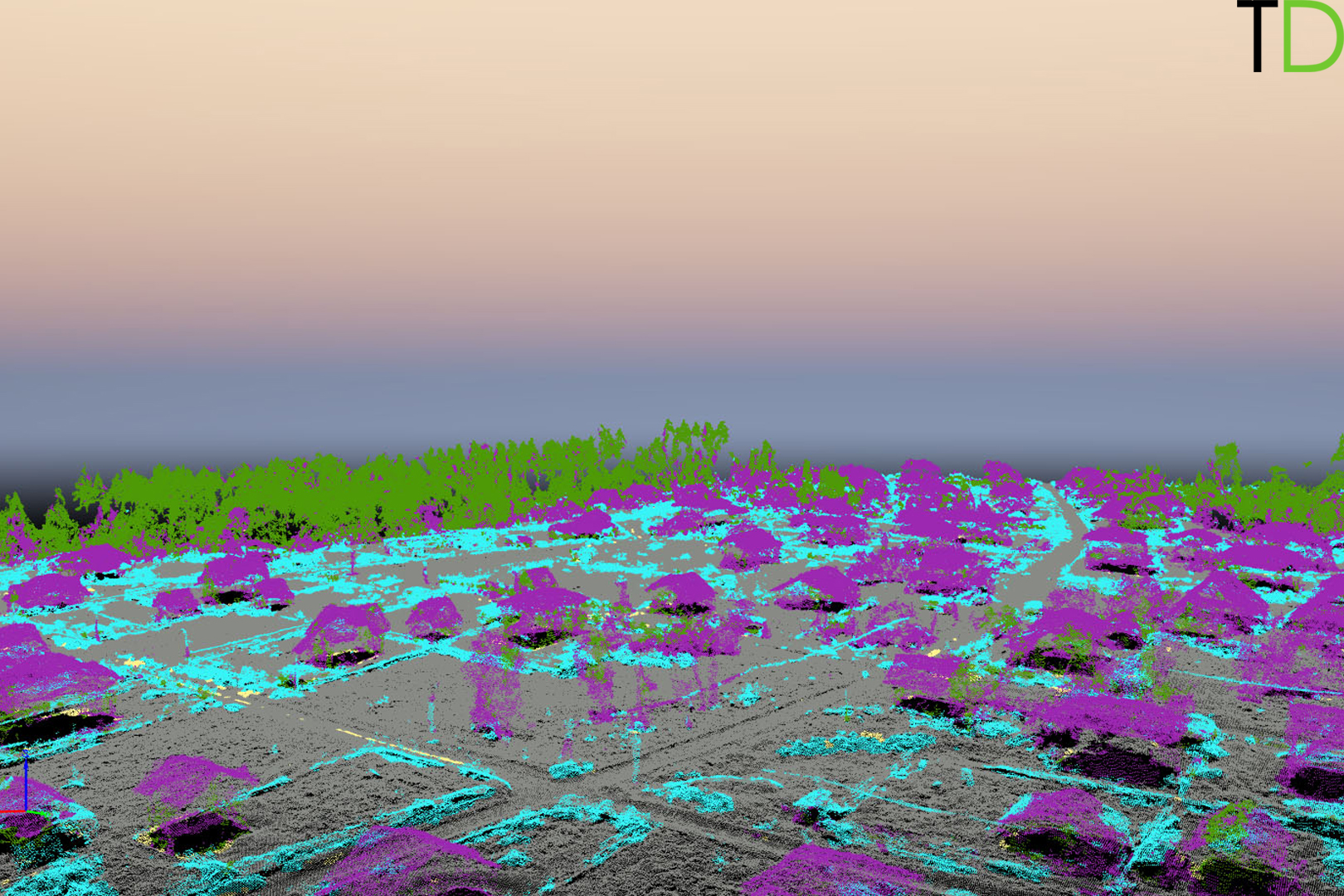
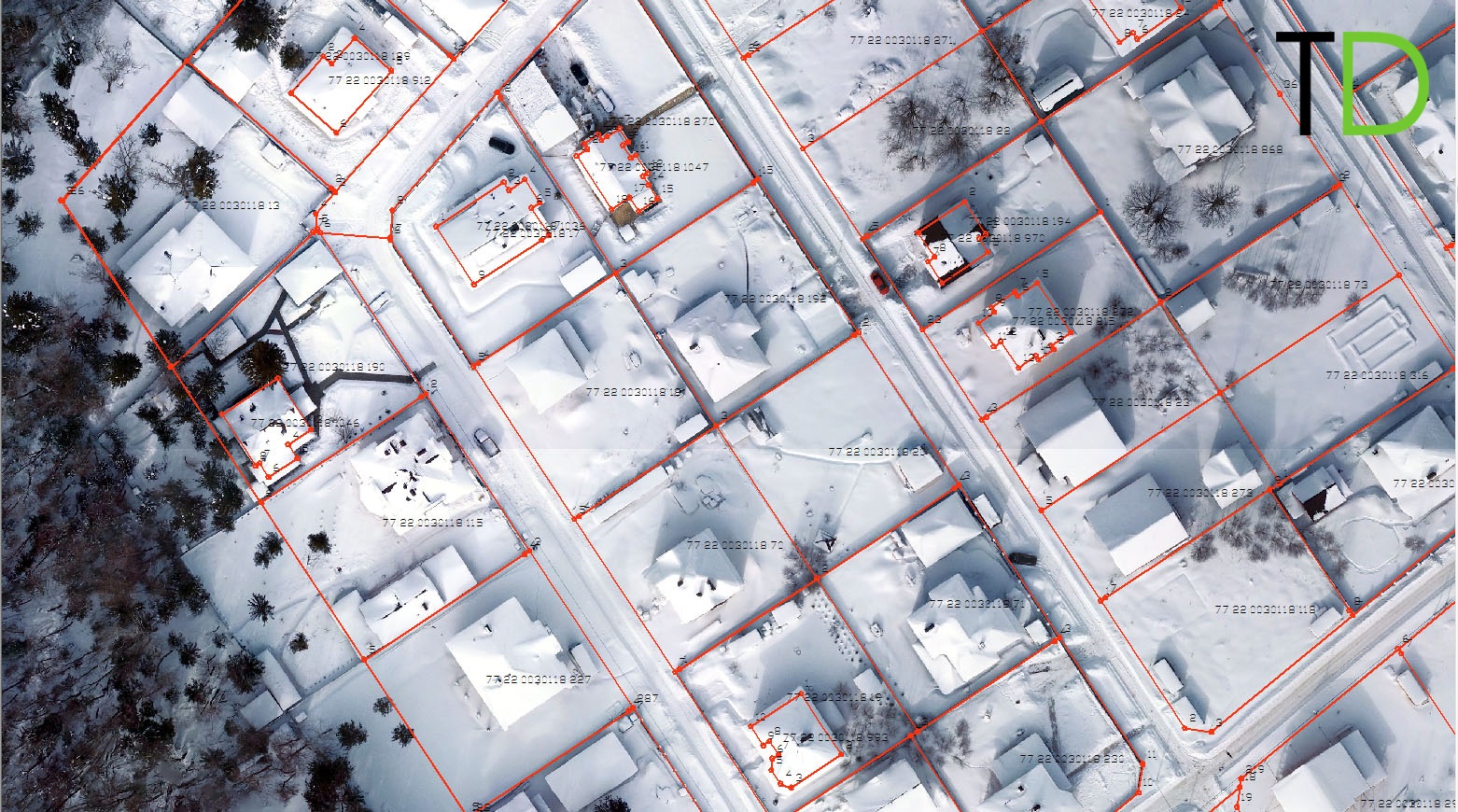
Вот облако точек после классификации. Цветом выделены растительность, опоры, провода ЛЭП, здания и сооружения: А это уже 3D-модель по этому облаку: На этом коттеджном посёлке задание было простым: 5 см на пиксель, простой ландшафт, минимум деревьев, нет наводок. Мы получили ортофотоплан и совместили его с кадастровым планом: Он может использоваться для межевания, инвентаризации и кадастровой оценки земельных участков, оценки эффективности использования земельных ресурсов, проектирования развития территорий, проектно-изыскательских работ, реконструкции и развития дорожных сетей, мониторинга состояния наземных и подземных коммуникаций, трубопроводов, ЛЭП и т. п., мониторинга земель с целью охраны, экологического мониторинга границ и площадей земель, подверженных изменению, создания трехмерных моделей местности для ГИС. Почему UgCS? Потому что других вариантов на рынке особо и нет, всё остальное — любительского уровня. Очень удобно, что любой дрон можно выставить на задание, и он просто полетит: поддерживается вся линейка DJI включая Мавики и ещё с десяток популярных в геодезии дронов. Нет привязки к железу вообще. Очень хорошее планирование — из офиса. Нормальное управление с ноутбука джойстиком или CLICK&GO, хорошее геокодирование изображений для Photoscan или Pix4D. На рынке есть альтернативное ПО без необходимости таскать ноутбук, но с куда меньшим количеством возможностей. Ноутбук — это огромное преимущество, но одновременно и проклятие системы: он сильно усложняет командировки. Зимой всё это становится ещё сложнее из-за того, что батареи всей связки мёрзнут, и приходится работать в перчатках (что не очень точно). Но других вариантов пока нет: либо такие неудобства, либо ограниченные возможности.
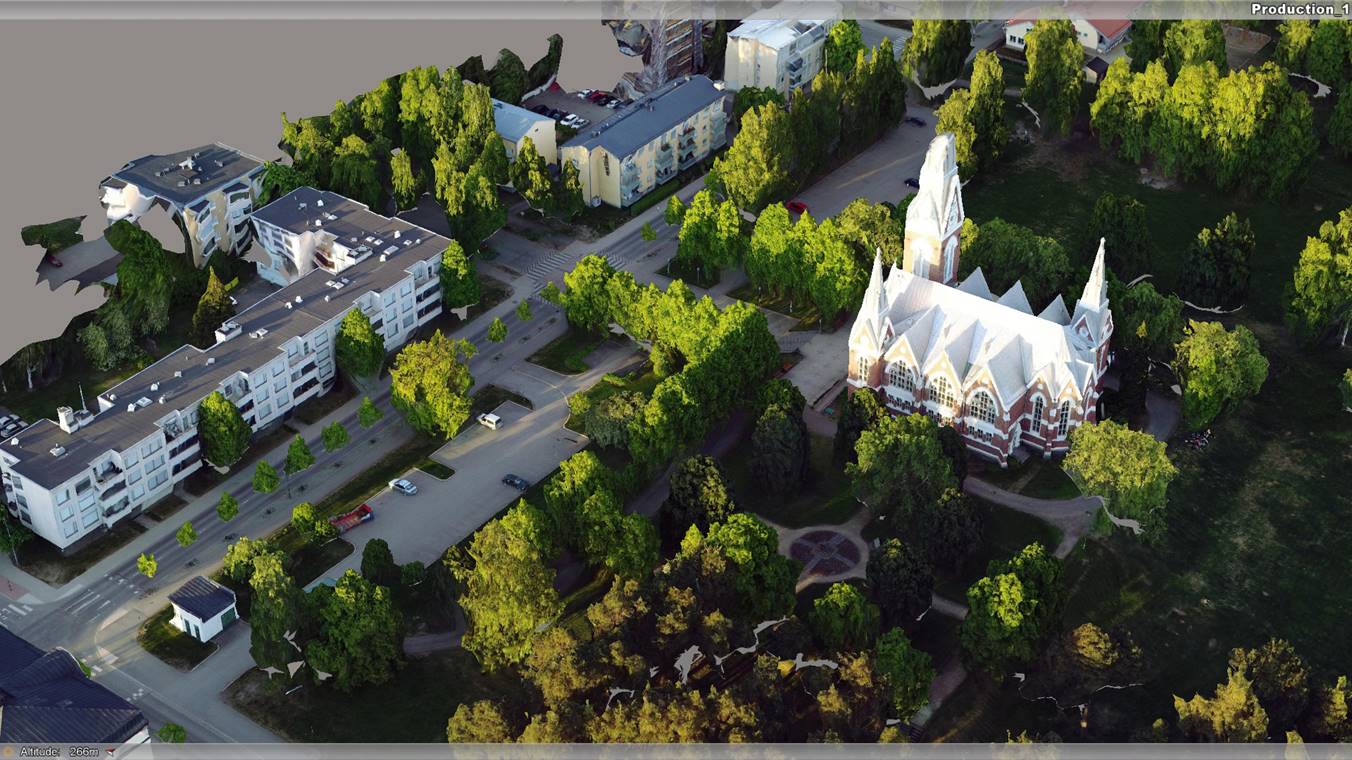
Вот пример результата трехмерной модели города:
Вот ещё один объект — трехмерная модель карьера: Вот такая история.