Усы, лапы и хвост: как нейронная сеть распознает котиков и другие объекты
МЕНЮ
Искусственный интеллект
Поиск
Регистрация на сайте
Помощь проекту
ТЕМЫ
Новости ИИ
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Слежка за людьми
Угроза ИИ
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Техническое зрение
Чат-боты
Авторизация
2018-04-27 17:49

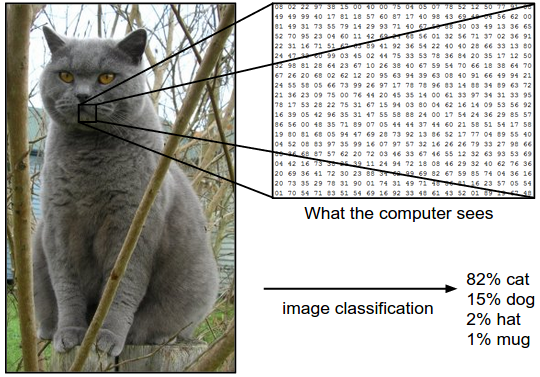
Представьте, что у нас есть множество картинок, которые нужно отсортировать по двум стопкам с помощью нейронной сети. Каким образом это можно сделать? Конечно, все зависит от самих объектов, но мы всегда можем выделить какие-то особенности.
Нам нужно знать как можно больше информации о входных данных и учесть их на вводе вручную, еще до обучения сети. К примеру, если у нас задача обнаружить на картинке разноцветных котов, будет важен не цвет, а форма объекта. Когда мы избавимся от цвета, перейдя к черно-белому изображению, сеть научится куда быстрее и успешнее: ей придется распознавать в несколько раз меньше информации.
Для распознавания произвольных объектов, к примеру котиков и лягушек, цвет очевидно важен: лягушка зеленая, а коты — нет. Если мы оставляем каналы цвета, для каждой палитры сеть учится заново распознавать объекты изображения, потому что этот канал цвета подается на другие нейроны.
А если мы хотим разрушить известный мем про котов и хлеб, научив нейронную сеть обнаруживать животное на любой картинке? Казалось бы, цвета и форма приблизительно одинаковая. Что тогда делать?
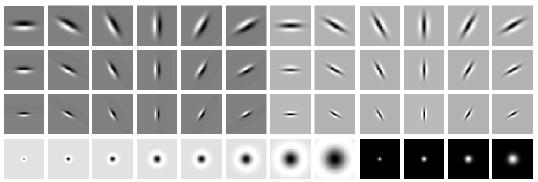
Банки фильтров и биологическое зрение
Разделение весов (Weight Sharing)
Чтобы сети не приходилось отдельно учиться распознавать котиков в разных частях картинки, мы «разделяем» веса, отвечающие за распознавание, между различными фрагментами входных сигналов.
Это требует специализированной архитектуры сети:
- сверточные сети для работы с изображениями
- рекуррентные сети для работы с текстом / последовательностями
Нейронные сети, эффективно использующиеся в распознавании изображений, в которых применяются специальные свёрточные слои (Convolution Layers).
Основная идея заключается в следующем:
- Используем weight sharing для создания «фильтрующего окна», пробегающего по изображению
- Примененный к изображению фильтр помогает выделить фрагменты, важные для распознавания
- В то время как в традиционном машинном зрении фильтры конструировали вручную, нейросети позволяют нам сконструировать оптимальные фильтры с помощью обучения
- Фильтрацию изображения можно естественным образом совместить с вычислением нейронной сети
- kernel — ядро свёртки, матрица весов
- pad — сколько пискелей надо добавить к изображению по краям
- stride — частота применения фильтра. Например, для stride=2 будем брать каждый второй пиксель изображения по вертикали и горизонтали, уменьшив разрешение вдвое
In [1]: def convolve(image, kernel, pad = 0, stride = 1): rows, columns = image.shape output_rows = rows // stride output_columns = columns // stride result = np.zeros((output_rows, output_columns)) if pad > 0: image = np.pad(image, pad, 'constant') kernel_size = kernel.size kernel_length = kernel.shape[0] half_kernel = kernel_length // 2 kernel_flat = kernel.reshape(kernel_size, 1) offset = builtins.abs(half_kernel-pad) for r in range(offset, rows - offset, stride): for c in range(offset, columns - offset, stride): rr = r - half_kernel + pad cc = c - half_kernel + pad patch = image[rr:rr + kernel_length, cc:cc + kernel_length] result[r//stride,c//stride] = np.dot(patch.reshape(1, kernel_size), kernel_flat) return result In [2]: def show_convolution(kernel, stride = 1): """Displays the effect of convolving with the given kernel.""" fig = pylab.figure(figsize = (9,9)) gs = gridspec.GridSpec(3, 3, height_ratios=[3,1,3]) start=1 for i in range(3): image = images_train[start+i,0] conv = convolve(image, kernel, kernel.shape[0]//2, stride) ax = fig.add_subplot(gs[i]) pylab.imshow(image, interpolation='nearest') ax.set_xticks([]) ax.set_yticks([]) ax = fig.add_subplot(gs[i + 3]) pylab.imshow(kernel, cmap='gray', interpolation='nearest') ax.set_xticks([]) ax.set_yticks([]) ax = fig.add_subplot(gs[i + 6]) pylab.imshow(conv, interpolation='nearest') ax.set_xticks([]) ax.set_yticks([]) pylab.show() In [3]: blur_kernel = np.array([[1, 4, 7, 4, 1], [4, 16, 26, 16, 4], [7, 26, 41, 26, 7], [4, 16, 26, 16, 4], [1, 4, 7, 4, 1]], dtype='float32') blur_kernel /= 273 Фильтры
Blur
Фильтр размытия позволяет сгладить неровности и подчеркнуть общую форму объектов.

In [4]: show_convolution(blur_kernel) Вертикальные края
Можно придумать фильтр, выделяющий вертикальные переходы яркости на изображении. Здесь голубой цвет обозначает переход от чёрного к белому, желтый — наоборот.
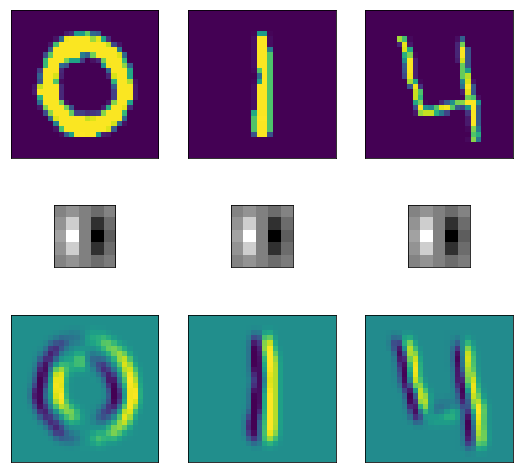
In [5]: vertical_edge_kernel = np.array([[1, 4, 0, -4, 1], [4, 16, 0, -16, -4], [7, 26, 0, -26, -7], [4, 16, 0, -16, -4], [1, 4, 0, -4, -1]], dtype='float32') vertical_edge_kernel /= 166 In [6]: show_convolution(vertical_edge_kernel) Горизонтальные края
Аналогичный фильтр можно построить для выделения горизонтальных штрихов на изображении.
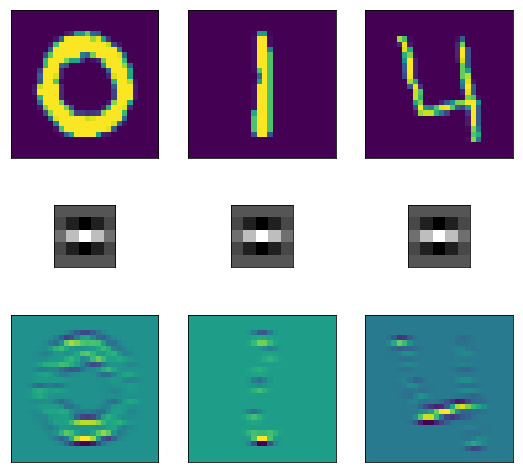
In [7]: horizontal_bar_kernel = np.array([[0, 0, 0, 0, 0], [-2, -8, -13, -8, -2], [4, 16, 26, 16, 4], [-2, -8, -13, -8, -2], [0, 0, 0, 0, 0]], dtype='float32') horizontal_bar_kernel /= 132 In [8]: show_convolution(horizontal_bar_kernel) Контурный фильтр
Также можно построить фильтр 9x9, который будет выделять контуры изображения.

In [9]: blob_kernel = np.array([[0, 1, 1, 2, 2, 2, 1, 1, 0], [1, 2, 4, 5, 5, 5, 4, 2, 1], [1, 4, 5, 3, 0, 3, 5, 4, 1], [2, 5, 3, -12, -24, -12, 3, 5, 2], [2, 5, 0, -24, -40, -24, 0, 5, 2], [2, 5, 3, -12, -24, -12, 3, 5, 2], [1, 4, 5, 3, 0, 3, 5, 4, 1], [1, 2, 4, 5, 5, 5, 4, 2, 1], [0, 1, 1, 2, 2, 2, 1, 1, 0]], dtype='float32') blob_kernel /= np.sum(np.abs(blob_kernel)) In [10]: show_convolution(blob_kernel) Таким образом работает классический пример с распознаванием цифр: у каждой цифры есть свои характерные геометрические черты (два круга — восьмерка, косая черта на половину изображения — единица и т.д.), по которым нейронная сеть может определить что за объект. Мы создаем фильтры, характеризующие каждую цифру, каждый из фильтров прогоняем по изображению и сводим ошибку к минимуму.
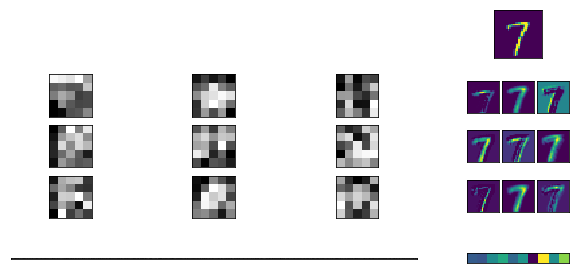
Основная идея свёрточной сети
- Создаем в нейросети свёрточный слой, который обеспечивает применение фильтра к изображению.
- Обучаем веса фильтра по алгоритму обратного распространения
К примеру, у нас есть изображение i, 2 сверточных фильтра w c выходами o. Элементы выходного изображения будут вычисляться следующим образом:

Тренировка весов
Алгоритм таков:
- Фильтр с одними и теми же весами применяется ко всем пикселям изображения.
- При этом фильтр «пробегает» по всему изображению.
- Мы хотим обучать эти веса (общие для всех пикселей) по алгоритму обратного распространения.
- Для этого надо свести применение фильтра к однократному умножению матриц.
- В отличие от полносвязного слоя, весов для обучения будет меньше, а примеров — больше.
- Хитрость — im2col
im2col
Начнем с изображения x, где каждый пиксель соответствует букве:



Проблемы анализа изображений
В процессе обучения может возникнуть множество подводных камней: некорректная выборка уже на втором слое загубит весь процесс обучения, она может быть недостаточно большой, из-за чего сеть не обучится выявлять всевозможные положения особенностей объекта.
Есть и обратная ситуация: при увеличении числа слоев происходит затухание градиента, появляется слишком большое число параметров, а функция может застрять в локальном минимуме.
В конце концов, кривой код тоже никто не отменял.
Чтобы научить работе с нейронными сетями, справляться с ее обучением и определять, где на практике можно воспользоваться машинным обучением, мы с Дмитрием Сошниковым разработали специальный курс Neuro Workshop. Конечно, на нем рассказывается и о том, как решать перечисленные выше проблемы.
Neuro Workshop пройдет 2 раза:
Выбирайте удобный день, приходите и задавайте Дмитрию свои вопросы.
Источник: habr.com