GeneLINEr
МЕНЮ
Искусственный интеллект
Поиск
Регистрация на сайте
Помощь проекту
ТЕМЫ
Новости ИИ
Искусственный интеллект
Голосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Слежка за людьми
Угроза ИИ
Разработка ИИГолосовой помощник
Городские сумасшедшие
ИИ в медицине
ИИ проекты
Искусственные нейросети
Слежка за людьми
Угроза ИИ
ИИ теория
Компьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Внедрение ИИКомпьютерные науки
Машинное обуч. (Ошибки)
Машинное обучение
Машинный перевод
Реализация ИИ
Реализация нейросетей
Создание беспилотных авто
Трезво про ИИ
Философия ИИ
Big data
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Техническое зрение
Чат-боты
Работа разума и сознаниеМодель мозгаРобототехника, БПЛАТрансгуманизмОбработка текстаТеория эволюцииДополненная реальностьЖелезоКиберугрозыНаучный мирИТ индустрияРазработка ПОТеория информацииМатематикаЦифровая экономика
Генетические алгоритмы
Капсульные нейросети
Основы нейронных сетей
Распознавание лиц
Распознавание образов
Распознавание речи
Техническое зрение
Чат-боты
Авторизация
2017-11-26 13:33
Последнее время вокруг все больше разговоров об искусственном интеллекте, то там то тут звучат модные термины "нейросети" и "генетические алгоритмы". В прошлых проектах (НейроКачели, НейроБашня и N3uralV1s10n) мы уже создавали простейшие нейронные сети, разобрались с тем что это такое в первом приближении и как они работают. Похоже пришло время сделать тоже самое с генетическими алгоритмами.
Генетический алгоритм - это прежде всего алгоритм эволюционный. Его основная фишка взята из живой природы. При поиске оптимального решения задачи мы порождаем варианты, отбираем из них лучшие, "скрещиваем" между собой, получая решения с общими для "родителей" удачными свойствами.

Для того чтобы пощупать всю эту магию в действии мы применим ее к решению классической задачи робототехники - движению робота по черной линии, а точнее - к подбору параметров ПИД-регулятора для того, чтобы робот смог двигаться по линии быстрее и точнее. Замечание: данный проект не несет в себе ни оттенка соревновательной составляющей. Наша основная цель не в том, чтобы "вывести" быстрого гонца по линии, мы хотим получить опыт использования алгоритмов генетического типа с целью дальнейшего их использования в близкой нам по духу хоббийной робототехнике.
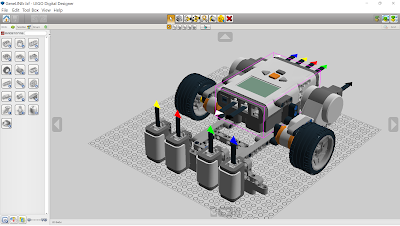
Начнем с конструкции робота. Это традиционная двухмоторная тележка на базе LEGO Mindstorms NXT, в передней части установлено 4 датчика освещенности, два из которых (внутренних, подключенных к портам 2 и 3) используются ПИД-регулятором робота для движения по линии, а два внешних(подключенных соответственно к портам 1 и 4) - для контроля срыва с линии в процессе обучения. Инструкцию в формате LEGO Digital Designer можно скачать по ссылке.
Для реализации поиска лучших для данной трассы коэффициентов ПИД-регулятора с применением генетического алгоритма нам потребуется создавать в памяти экземпляры ПИД-регулятора и автоматизированно тестировать их на реальном роботе, оценивая результат на соответствие заданному условию - более длинный пройденный путь в единицу времени, соответственно выше скорость движения по линии, при этом срывы с трассы недопустимы. Алгоритм в общем виде выглядит следующим образом: 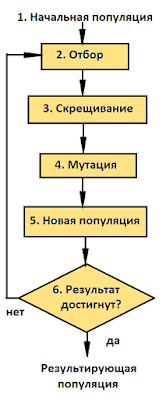
Для создания первой популяции виртуальных роботов давайте, для начала, опишем пользовательскую структуру данных, которая будет использоваться в качестве шаблона для создания особей в популяции. struct person
{
// у каждой особи должно быть имя, хотя бы codename
string name;
// номер поколения, в котором родилась данная особь
int generation;
// энергичность (быстрота) особи
int speed;
// скорость реакции
float reaction;
// мудрость (память) особи
float memory;
// интуиция (проницательность)
float intuition;
// степень доминантности особи
float dominance;
// пройденный особью путь за отведенный на тестирование промежуток времени
int path;
};
Теперь создадим первую популяцию на основе этого шаблона, в ней у нас будет 6 особей:
person robot[6];
Генерируем случайным образом свойства особей первой популяции:
for (int i=0;i<6;i++){
robot[i].name = "GeneLINEr_"+NumToStr(Random(1000));
robot[i].generation=1;
// энергичность (быстрота) особи 0..100
robot[i].speed = Random(70)+30;
// скорость реакции 0..3
robot[i].reaction = Random(3000)/1000;
// мудрость (память) особи 0..0,1
robot[i].memory = Random(100)/1000;
// интуиция (проницательность) 0..3
robot[i].intuition = Random(3000)/1000;
// степень доминантности особи не понятна до тестирования
robot[i].dominance = 0;
// пройденный особью жизненный путь = 0
robot[i].path = 0;
}
Далее начинается самое интересное. Начинаем условно бесконечный цикл смены поколений. В каждом поколении нам нужно испытать особей данного поколения и выявить из них самых быстрых и точных, не слетающих с трассы.
В роботе реализована функция ПИД-регулятора движения по линии, принимающий на вход параметры Kp, Ki, Kd, скорость робота, выполняющая 5 секундное движение по линии и возвращающая длину пройденного пути, сглаженного до криволинейной траектории. long pid(float Pk,float Ik,float Dk,int speed){
long B=0;
long C=0;
long path=0;
long MC=MotorRotationCount(OUT_C);
long MB=MotorRotationCount(OUT_B);
long e = 0;
int porog=28;
float ERRo=0;
float ERR=0;
float u=0;
float z1=0;
float z2=0;
long tmp=CurrentTick();
int p;
int i;
int d;
while(CurrentTick()-tmp<=5000){
MC=MotorRotationCount(OUT_C);
MB=MotorRotationCount(OUT_B);
ERR=Sensor(IN_3)-Sensor(IN_2);
p=Pk*ERR;
d=Dk*(ERR-ERRo);
i=Ik*e;
if(i>10)i=10;
if(i<-10)i= -10;
u=p+i+d;
z1=speed-u;
z2=speed+u;
if(speed-u>100)z1=100;
if(speed-u<-100)z1=-100;
if(speed+u>100)z2=100;
if(speed+u<-100)z2=-100;
OnFwd(OUT_B,z1);
OnFwd(OUT_C,z2);
if(Sensor(IN_1)<=porog){
PlayTone(TONE_C5, MS_500);
RotateMotorEx(OUT_BC, 35, 100, 100, true, true);
go_to_line();
break;
}
if(Sensor(IN_4)<=porog){
PlayTone(TONE_C5, MS_500);
RotateMotorEx(OUT_BC, 35, 100, -100, true, true);
go_to_line();
break;
}
ERRo=ERR;
e+=ERR;
B=MotorRotationCount(OUT_B)-MB;
C=MotorRotationCount(OUT_C)-MC;
if(B>0 && C>0){
if(B<C){
path+=B;
}
else{
path+=C;
}
}
}
Off(OUT_BC);
return path;
}
void go_to_line(){
float P=1.0;
float D=1.0;
float ERRo=0;
float ERR=0;
float u=0;
while(abs(Sensor(IN_2)-Sensor(IN_3))>5){
int ERR=Sensor(IN_3)-Sensor(IN_2);
int u=P*ERR+D*(ERR-ERRo);
int z1=-u;
int z2=+u;
if(z1>100) z1=100;
if(z1<-100) z1=-100;
if(z2>100) z2=100;
if(z2<-100) z2=-100;
OnFwd(OUT_B,z1);
OnFwd(OUT_C,z2);
}
}
В случае, если в процессе 5-секундного испытания особи один из внешних датчиков видит линию, считается что робот сошел с трассы. При этом функция возвращает его на линию и особь выбывает из тестирования с результатом, который успела набрать до срыва, как правило рейтинг данной особи будет низким.
for (int i=5;i>=0;i--){
robot[i].path = pid(robot[i].reaction,
robot[i].memory,robot[i].intuition,robot[i].speed);
PlayTone(TONE_A4, MS_500);
}
После испытания всех особей текущего поколения ранжируем их в порядке убывания пройденного за время тестирования пути. Так как время на тест для каждой особи фиксировано - 5 секунд, соответственно у особей убывает и скорость. Будем использовать пузырьковую сортировку и "временную особь", для перестановки пар при ранжировании. person robot_tmp;
for (int i=0;i<5;i++){
for (int j=0;j<(5-i);j++){
if(robot[j].path < robot[j+1].path){
robot_tmp = robot[j];
robot[j]=robot[j+1];
robot[j+1]= robot_tmp;
}
}
}
Чем выше у особи рейтинг, тем выше и доминантность данной особи, соответственно тем большую часть свойст данной особи унаследуют ее потомки (выше = ближе к 1):
for (int i=0;i<6;i++){
robot[i].dominance=i+1;
}
Две особи, самые слабые в популяции (5 и 6 в ранжированном списке) умирают, остальные дают потомство, порождая 6 особей новой популяции, наследующих черты родительских особей. В скрещивании участвуют доминантные признаки особей, давая соотношение унаследованных признаков. Унаследованный признак новорожденного кроме этого подвергается колебанию в 20%, для ускорения эволюции.
person newborn(person male, person female){
person newburn;
male.dominance = 1 - (male.dominance/(male.dominance+female.dominance));
female.dominance = 1 - male.dominance;
newburn.name = "GeneLINEr_"+NumToStr(Random(1000));
newburn.generation=male.generation+1;
if(male.speed>female.speed){
newburn.speed = male.speed;
}
else{
newburn.speed=female.speed;
}
newburn.reaction = male.reaction * male.dominance + female.reaction * female.dominance;
newburn.reaction =newburn.reaction *((Random(40)+80)/100.0);
newburn.memory = male.memory * male.dominance + female.memory * female.dominance;
newburn.memory =newburn.memory *((Random(40)+80)/100.0);
newburn.intuition = male.intuition * male.dominance + female.intuition * female.dominance;
newburn.intuition = newburn.intuition *((Random(40)+80)/100.0);
newburn.path = 0;
newburn.dominance = 0;
if(newburn.speed>max_speed){
max_speed=newburn.speed;
}
return newburn;
}
// новая популяция из 6 особей
person robot_next_generation[6];
robot_next_generation[0] = newborn(0,1);
robot_next_generation[1] = newborn(0,2);
robot_next_generation[2] = newborn(0,3);
robot_next_generation[3] = newborn(1,2);
robot_next_generation[4] = newborn(1,3);
robot_next_generation[5] = newborn(2,3);
Теперь в дело вступает природа и у одной, случайной особи происходит мутация - ее один, случайный, признак изменяется. Мутация чаще всего приводит к появлению неконкурентоспособных или вообще нежизнеспособных особей, однако очень полезна в ситуации, когда вектор развития эволюции пошел изначально не в том направлении. В результате мутации может появиться особь со свойством, выигрышно выделяющим ее на фоне остальных. Такая особь сразу же окажется на вершине рейтинга и даст начало новой династии.
// Мутация
void mutants(){
int property=Random(3);
int mutant=Random(5);;
if(mutant<4){
switch(property){
case 0:
robot_next_generation[mutant].speed = max_speed+5;
break;
case 1:
robot_next_generation[mutant].reaction =robot_next_generation[mutant].reaction *((Random(40)+80)/100.0);
break;
case 2:
robot_next_generation[mutant].memory =robot_next_generation[mutant].memory *((Random(40)+80)/100.0);
break;
case 3:
robot_next_generation[mutant].intuition = robot_next_generation[mutant].intuition *((Random(40)+80)/100.0);
break;
default:
break;
}
}
else{
switch(property) {
case 0:
robot_next_generation[mutant].speed = max_speed+5;
break;
case 1:
robot_next_generation[mutant].reaction = Random(3000)/1000;
break;
case 2:
robot_next_generation[mutant].memory = Random(100)/1000;
break;
case 3:
robot_next_generation[mutant].intuition = Random(3000)/1000;
break;
default:
break;
}
}
}
Теперь производим смену популяций. Дети сменяют родителей:
for(int i=0;i<6;i++){
robot[i]=robot_next_generation[i];
}
Теперь снова пришла пора испытать новое поколение, более приспособленное к решению поставленной задачи, оценить возросшую скорость,, выявить сильнейших и так до тех пор, пока результат не будет нас устраивать.
int msg_len;
string logstr;
for(int i=0;i<6;i++){
logstr = robot[i].name;
logstr = logstr + ";" + NumToStr(robot[i].generation);
logstr = logstr + ";" + NumToStr(robot[i].reaction) +";"+NumToStr(robot[i].memory)+";"+NumToStr(robot[i].intuition);
logstr = logstr + ";" + NumToStr(robot[i].path)+";"+NumToStr(robot[i].speed);
msg_len = StrLen(logstr);
WriteLnString(fh, logstr, msg_len);
}
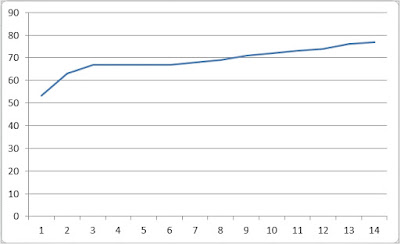
По данным, накопленным в файле в процессе работы программы, можно представить ход эволюции в виде наглядного графика (ось X - номер поколения, ось Y - средняя скорость особи):
Генетический алгоритм - это прежде всего алгоритм эволюционный. Его основная фишка взята из живой природы. При поиске оптимального решения задачи мы порождаем варианты, отбираем из них лучшие, "скрещиваем" между собой, получая решения с общими для "родителей" удачными свойствами.
Начнем с конструкции робота. Это традиционная двухмоторная тележка на базе LEGO Mindstorms NXT, в передней части установлено 4 датчика освещенности, два из которых (внутренних, подключенных к портам 2 и 3) используются ПИД-регулятором робота для движения по линии, а два внешних(подключенных соответственно к портам 1 и 4) - для контроля срыва с линии в процессе обучения. Инструкцию в формате LEGO Digital Designer можно скачать по ссылке.
{
// у каждой особи должно быть имя, хотя бы codename
string name;
// номер поколения, в котором родилась данная особь
int generation;
// энергичность (быстрота) особи
int speed;
// скорость реакции
float reaction;
// мудрость (память) особи
float memory;
// интуиция (проницательность)
float intuition;
// степень доминантности особи
float dominance;
// пройденный особью путь за отведенный на тестирование промежуток времени
int path;
};
Теперь создадим первую популяцию на основе этого шаблона, в ней у нас будет 6 особей:
person robot[6];
Генерируем случайным образом свойства особей первой популяции:
for (int i=0;i<6;i++){
robot[i].name = "GeneLINEr_"+NumToStr(Random(1000));
robot[i].generation=1;
// энергичность (быстрота) особи 0..100
robot[i].speed = Random(70)+30;
// скорость реакции 0..3
robot[i].reaction = Random(3000)/1000;
// мудрость (память) особи 0..0,1
robot[i].memory = Random(100)/1000;
// интуиция (проницательность) 0..3
robot[i].intuition = Random(3000)/1000;
// степень доминантности особи не понятна до тестирования
robot[i].dominance = 0;
// пройденный особью жизненный путь = 0
robot[i].path = 0;
}
Далее начинается самое интересное. Начинаем условно бесконечный цикл смены поколений. В каждом поколении нам нужно испытать особей данного поколения и выявить из них самых быстрых и точных, не слетающих с трассы.
long B=0;
long C=0;
long path=0;
long MC=MotorRotationCount(OUT_C);
long MB=MotorRotationCount(OUT_B);
long e = 0;
int porog=28;
float ERRo=0;
float ERR=0;
float u=0;
float z1=0;
float z2=0;
long tmp=CurrentTick();
int p;
int i;
int d;
while(CurrentTick()-tmp<=5000){
MC=MotorRotationCount(OUT_C);
MB=MotorRotationCount(OUT_B);
ERR=Sensor(IN_3)-Sensor(IN_2);
p=Pk*ERR;
d=Dk*(ERR-ERRo);
i=Ik*e;
if(i>10)i=10;
if(i<-10)i= -10;
u=p+i+d;
z1=speed-u;
z2=speed+u;
if(speed-u>100)z1=100;
if(speed-u<-100)z1=-100;
if(speed+u>100)z2=100;
if(speed+u<-100)z2=-100;
OnFwd(OUT_B,z1);
OnFwd(OUT_C,z2);
if(Sensor(IN_1)<=porog){
PlayTone(TONE_C5, MS_500);
RotateMotorEx(OUT_BC, 35, 100, 100, true, true);
go_to_line();
break;
}
if(Sensor(IN_4)<=porog){
PlayTone(TONE_C5, MS_500);
RotateMotorEx(OUT_BC, 35, 100, -100, true, true);
go_to_line();
break;
}
ERRo=ERR;
e+=ERR;
B=MotorRotationCount(OUT_B)-MB;
C=MotorRotationCount(OUT_C)-MC;
if(B>0 && C>0){
if(B<C){
path+=B;
}
else{
path+=C;
}
}
}
Off(OUT_BC);
return path;
}
void go_to_line(){
float P=1.0;
float D=1.0;
float ERRo=0;
float ERR=0;
float u=0;
while(abs(Sensor(IN_2)-Sensor(IN_3))>5){
int ERR=Sensor(IN_3)-Sensor(IN_2);
int u=P*ERR+D*(ERR-ERRo);
int z1=-u;
int z2=+u;
if(z1>100) z1=100;
if(z1<-100) z1=-100;
if(z2>100) z2=100;
if(z2<-100) z2=-100;
OnFwd(OUT_B,z1);
OnFwd(OUT_C,z2);
}
}
В случае, если в процессе 5-секундного испытания особи один из внешних датчиков видит линию, считается что робот сошел с трассы. При этом функция возвращает его на линию и особь выбывает из тестирования с результатом, который успела набрать до срыва, как правило рейтинг данной особи будет низким.
for (int i=5;i>=0;i--){
robot[i].path = pid(robot[i].reaction,
robot[i].memory,robot[i].intuition,robot[i].speed);
PlayTone(TONE_A4, MS_500);
}
for (int i=0;i<5;i++){
for (int j=0;j<(5-i);j++){
if(robot[j].path < robot[j+1].path){
robot_tmp = robot[j];
robot[j]=robot[j+1];
robot[j+1]= robot_tmp;
}
}
}
Чем выше у особи рейтинг, тем выше и доминантность данной особи, соответственно тем большую часть свойст данной особи унаследуют ее потомки (выше = ближе к 1):
for (int i=0;i<6;i++){
robot[i].dominance=i+1;
}
Две особи, самые слабые в популяции (5 и 6 в ранжированном списке) умирают, остальные дают потомство, порождая 6 особей новой популяции, наследующих черты родительских особей. В скрещивании участвуют доминантные признаки особей, давая соотношение унаследованных признаков. Унаследованный признак новорожденного кроме этого подвергается колебанию в 20%, для ускорения эволюции.
person newborn(person male, person female){
person newburn;
male.dominance = 1 - (male.dominance/(male.dominance+female.dominance));
female.dominance = 1 - male.dominance;
newburn.name = "GeneLINEr_"+NumToStr(Random(1000));
newburn.generation=male.generation+1;
if(male.speed>female.speed){
newburn.speed = male.speed;
}
else{
newburn.speed=female.speed;
}
newburn.reaction = male.reaction * male.dominance + female.reaction * female.dominance;
newburn.reaction =newburn.reaction *((Random(40)+80)/100.0);
newburn.memory = male.memory * male.dominance + female.memory * female.dominance;
newburn.memory =newburn.memory *((Random(40)+80)/100.0);
newburn.intuition = male.intuition * male.dominance + female.intuition * female.dominance;
newburn.intuition = newburn.intuition *((Random(40)+80)/100.0);
newburn.path = 0;
newburn.dominance = 0;
if(newburn.speed>max_speed){
max_speed=newburn.speed;
}
return newburn;
}
// новая популяция из 6 особей
person robot_next_generation[6];
robot_next_generation[0] = newborn(0,1);
robot_next_generation[1] = newborn(0,2);
robot_next_generation[2] = newborn(0,3);
robot_next_generation[3] = newborn(1,2);
robot_next_generation[4] = newborn(1,3);
robot_next_generation[5] = newborn(2,3);
Теперь в дело вступает природа и у одной, случайной особи происходит мутация - ее один, случайный, признак изменяется. Мутация чаще всего приводит к появлению неконкурентоспособных или вообще нежизнеспособных особей, однако очень полезна в ситуации, когда вектор развития эволюции пошел изначально не в том направлении. В результате мутации может появиться особь со свойством, выигрышно выделяющим ее на фоне остальных. Такая особь сразу же окажется на вершине рейтинга и даст начало новой династии.
// Мутация
void mutants(){
int property=Random(3);
int mutant=Random(5);;
if(mutant<4){
switch(property){
case 0:
robot_next_generation[mutant].speed = max_speed+5;
break;
case 1:
robot_next_generation[mutant].reaction =robot_next_generation[mutant].reaction *((Random(40)+80)/100.0);
break;
case 2:
robot_next_generation[mutant].memory =robot_next_generation[mutant].memory *((Random(40)+80)/100.0);
break;
case 3:
robot_next_generation[mutant].intuition = robot_next_generation[mutant].intuition *((Random(40)+80)/100.0);
break;
default:
break;
}
}
else{
switch(property) {
case 0:
robot_next_generation[mutant].speed = max_speed+5;
break;
case 1:
robot_next_generation[mutant].reaction = Random(3000)/1000;
break;
case 2:
robot_next_generation[mutant].memory = Random(100)/1000;
break;
case 3:
robot_next_generation[mutant].intuition = Random(3000)/1000;
break;
default:
break;
}
}
}
Теперь производим смену популяций. Дети сменяют родителей:
for(int i=0;i<6;i++){
robot[i]=robot_next_generation[i];
}
Теперь снова пришла пора испытать новое поколение, более приспособленное к решению поставленной задачи, оценить возросшую скорость,, выявить сильнейших и так до тех пор, пока результат не будет нас устраивать.
На этапе ранжирования можно сохранять информацию о свойствах особей в каждой популяции в файл. byte fh;
int msg_len;
string logstr;
for(int i=0;i<6;i++){
logstr = robot[i].name;
logstr = logstr + ";" + NumToStr(robot[i].generation);
logstr = logstr + ";" + NumToStr(robot[i].reaction) +";"+NumToStr(robot[i].memory)+";"+NumToStr(robot[i].intuition);
logstr = logstr + ";" + NumToStr(robot[i].path)+";"+NumToStr(robot[i].speed);
msg_len = StrLen(logstr);
WriteLnString(fh, logstr, msg_len);
}
По данным, накопленным в файле в процессе работы программы, можно представить ход эволюции в виде наглядного графика (ось X - номер поколения, ось Y - средняя скорость особи):
Источник: karandashsamodelkin.blogspot.ru